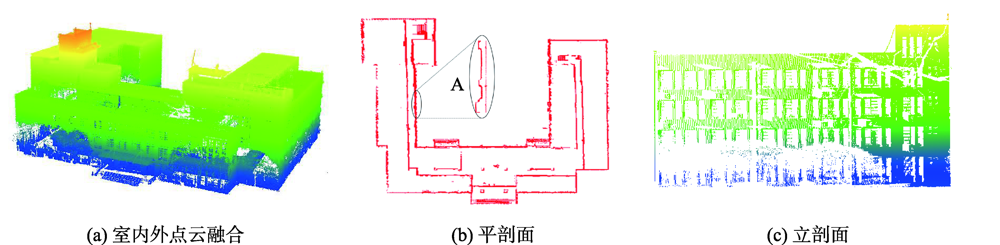
墙体、窗户等单元构件是建筑物重要组成部分,精细提取其几何参数及位置信息对于完整表达建筑物整体模型具有重要意义。针对单一点云数据源无法获取建筑物单元构件相关参数并完整表达室内外模型重建问题,本文提出一整套融合室内外多源点云数据的BIM模型重建技术。为验证方法的有效性,选取河南理工大学测绘与国土信息工程学院教学楼为实验区域,室内外数据采集时间为2019年5月。在对实验区域机载、车载和地面点云数据进行预处理的基础上,分别选取各点集共轭特征点,以高精度的地面点云为基准,将机载和车载点云融合到地面点云。为提高后期模型重建精度及处理效率,以点云间最小空间距离的方式剔除重叠区域冗余数据。对建筑物进行整体平面与立面剖切,将剖切面在CAD中进行跟踪绘制二维线划图,将二维线划图导入Revit软件中绘制轴网与标高,并利用提取到的墙体几何参数编辑墙体族类型进行BIM模型重建。根据提取到的窗户几何参数统计其类型并编辑窗户族,将其归为有规律性和无规律性两类,有规律性窗户单元找出其重复性规律及位置控制参数,无规律性窗户单元逐个放置,二者结合优化BIM模型。为验证模型重建精度,选取建筑物代表性立面,以人工实测立面边长为参照,将由点云数据提取到的相对应立面边长及模型边长与之对比分析,其误差集中分布在0.0~0.2 m之间,存在0.2 m以上误差,但大部分在0.3 m以下。实验结果证明了该方法的准确性。
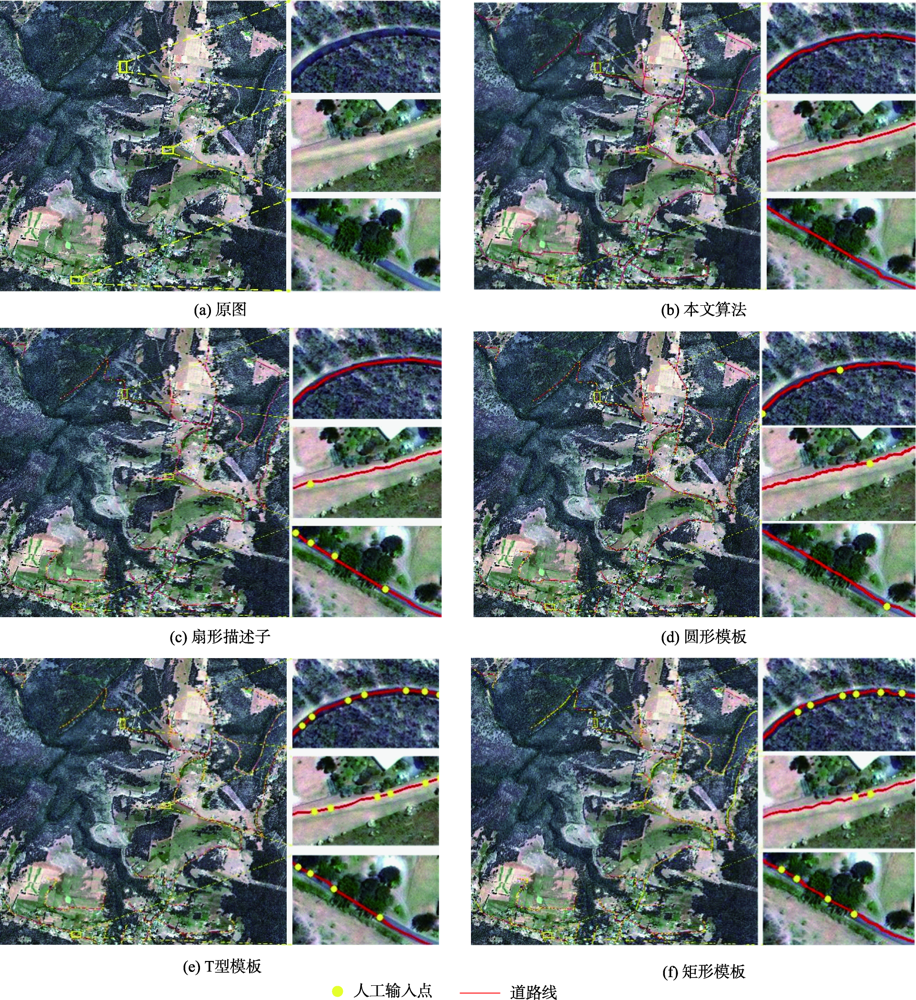
宽度窄、路面材质与农田差异性低是农村机耕路的特点,也是导致现有模板匹配方法自动化程度低的主要因素。本文针对这一问题,提出动态权重约束下的农村机耕路提取方法。该方法首先通过改进多尺度线段方向直方图(Multi-Scale Line Segment Orientation Histogram, MLSOH)模型,对机耕路局部道路方向进行预测,能够降低由于田埂干扰所导致的道路方向错误预测几率;其次为明确表征机耕路线性特征,对影像进行线段提取。并将局部区域线段长度作为权重动态分配的主要因子,对不同道路预测方向进行动态权重分配,以此解决路面宽度窄导致的匹配准确度下降问题。最后,将HSL色彩空间相似性分析模型与动态权重因子进行结合,构成HSL动态匹配模型,以此提高机耕路与农田之间的对比性。本文以3幅不同地区、不同类型的高分辨率影像为实验数据,与其他多个模板匹配算法进行对比分析,结果表明,本文方法道路提取的完整度、正确率以及质量均在95%以上。同时相对于其他方法,在保证机耕路提取精度的基础上,本文提出的方法具有自动化程度高的优点,并且本文的方法也适用于其他农村区域道路。
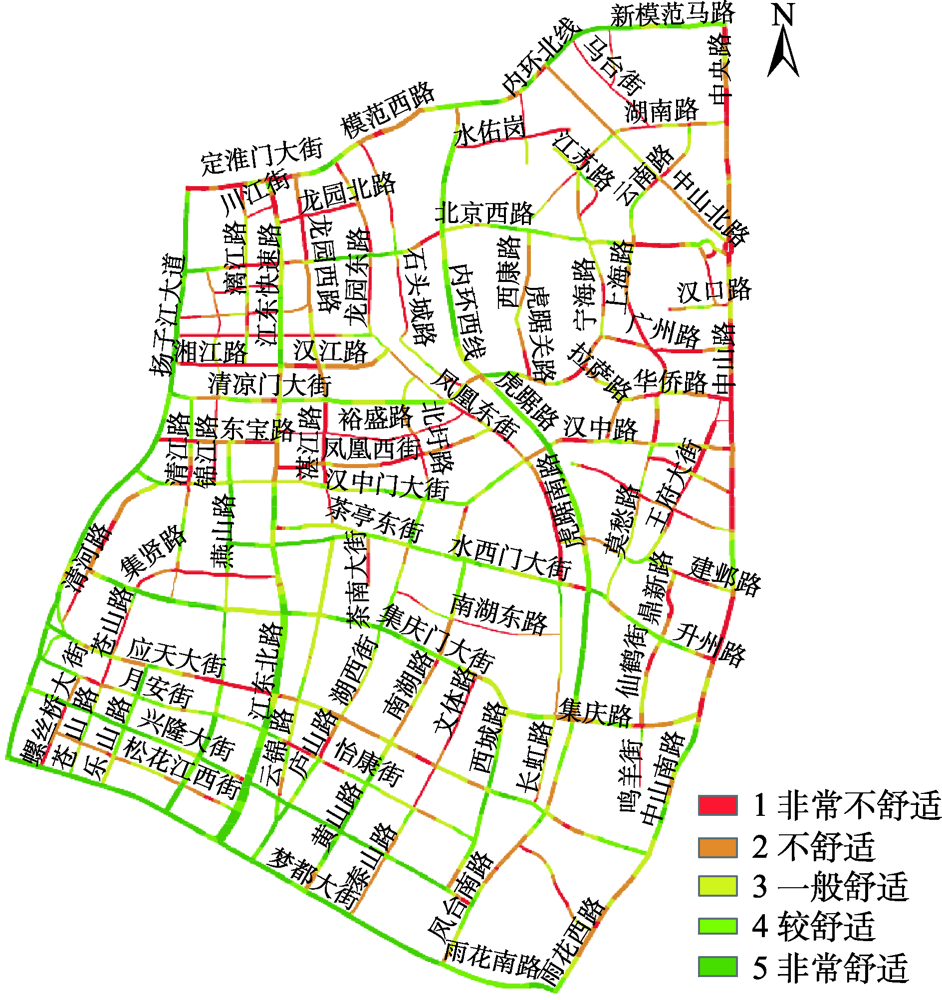
城市道路空间舒适度是综合刻画城市道路环境的量化指标之一,可为城市道路规划建设、城市交通优化、城市环境评估等提供参考。本文以街景影像为基础数据,从空间视角阐述了城市道路空间舒适度内涵,构建了城市道路空间舒适度量化指标,建立了以语义分割和等距采样为基础的城市道路空间舒适度测度方法和空间插值方法,最后以南京市局部城区为样区进行了实验,并分析了城市道路空间舒适度特征。实验结果表明:① 语义分割中主要要素的分割精度满足要求,分割总体精度为84.92%, Kappa系数为80.06%;② 综合考虑数据处理时间和舒适度量化表达程度, 200 m采样间距可以综合描述研究区道路空间舒适度状态;③ 本文提出的双向约束插值方法可消除突变点、梯形插值形态、花斑状纹理等异常插值现象,同时可有效保持道路空间舒适度方向特征;④ 本文提出的测度方法可以有效度量城市道路空间舒适度,测度等级精度达80%;⑤ 城市道路空间舒适度等级与道路等级整体上呈现正相关关系,且舒适度在实验区呈现南高北低、建邺区较高、鼓楼及历史老城区低的空间分布状态。
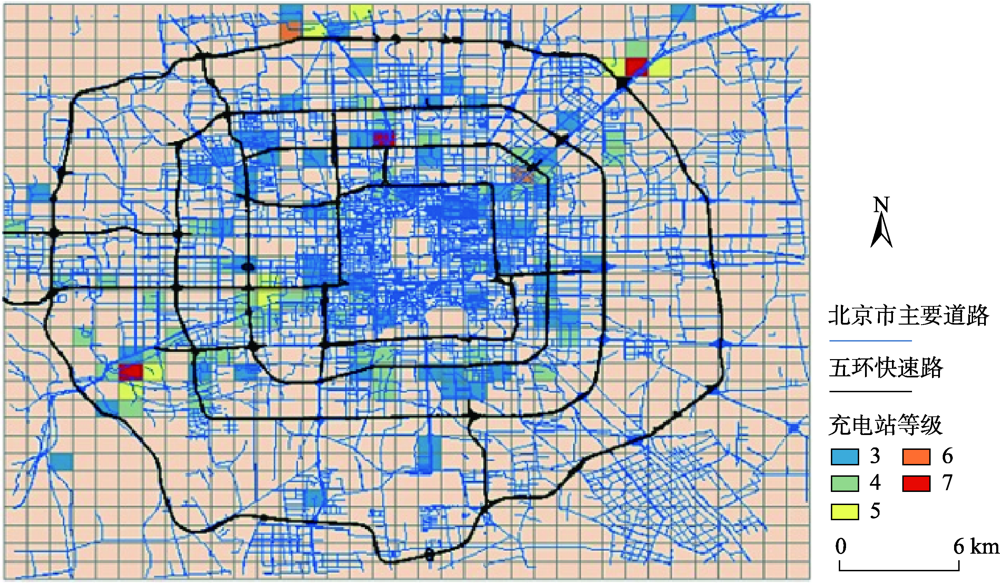
近年来随着能源短缺和环境污染问题日益严重,低排放、低噪声、节能环保的电动汽车受到了越来越多的关注。特别在电动出租车领域,我国公共充电设施的规划和建设已迫在眉睫。针对目前电动出租车专用充电站选址研究方面存在的缺少丰富详实的车辆运行数据支撑、未能充分结合出租车的换班特性开展分析和在选址模型构建方面未能充分考虑已建成充电站的影响等不足,本文提出了一种合理可行的电动出租车专用充电场站选址方案,具体流程为:① 基于对出租车GPS数据的统计和分析,利用蒙特卡洛方法提取充电需求;② 对充电站建设的影响因素进行分析,综合考虑了建设成本,出租车等待成本和已建成充电站的影响,建立了充电站的选址模型;③ 利用多种群遗传算法对模型进行求解;④ 利用北京市1.2万辆出租车连续一周的运行轨迹数据提取了充电需求,模拟10万辆电动出租车的充电需求规模对选址模型进行了算例分析。实验结果表明,选址模型能够有效地减少充电站建设投入的成本并缩短出租车平均充电等待时间。
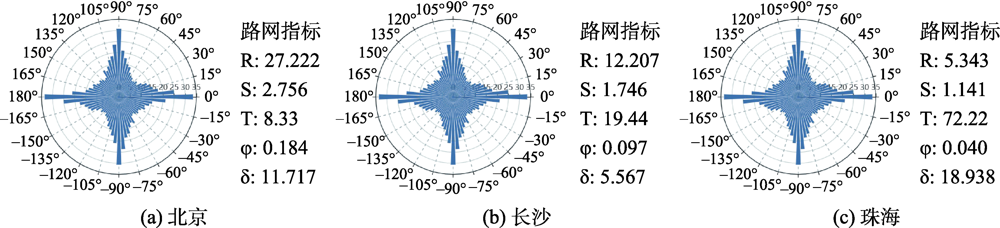
城市化的快速发展推动了我国城市道路网的不断扩张和发展。城市道路网是一个动态、开放、自组织的空间复杂网络,构成了城市的结构框架,研究城市道路网的结构特征对路网规划和城市建设有着重要的应用价值。在国内城市道路网络结构特征的相关研究中,很少有学者基于道路走向的视角对整个城市路网结构进行研究,也缺少对全国主要城市路网的整体性评价。本文选取我国一、二线及新一线49个城市作为研究区和2020年2月的城市道路网作为实验数据,首先采用图论和玫瑰图的方法对49个城市的道路网方向特征进行可视化,定性分析城市路网的复杂结构,然后基于最值比R、道路首位度S、过阈值比T、走向顺序φ和路网密度δ等5个路网指标对49个城市的道路网进行聚类分析,从而探究我国城市路网的分布特征。结果表明,我国城市主要以南北和东西走向为城市道路的主导向,部分城市因地形的影响沿着有利于城市交通和居民生活的方向规划道路;基于路网指标的聚类得到了十字正交型、十字状向风车状扩散型、风车状向圆弧四角星扩散型和混合复杂型等4类城市道路网类型,这4类城市路网在方向分布特征上具有显著差异,突出表现在有序性和复杂性;从路网类型的空间分布来看,十字正交型和十字状向风车状扩散型路网大多分布在我国的内陆地区,而风车状向圆弧四角星扩散型和混合复杂型路网则大多分布在沿海地区。本文主要通过分析我国一、二线及新一线城市道路网的分布特征,探究了我国主要城市交通路网的布局现状,能够为城市新区道路规划和路网布局优化提供参考依据。
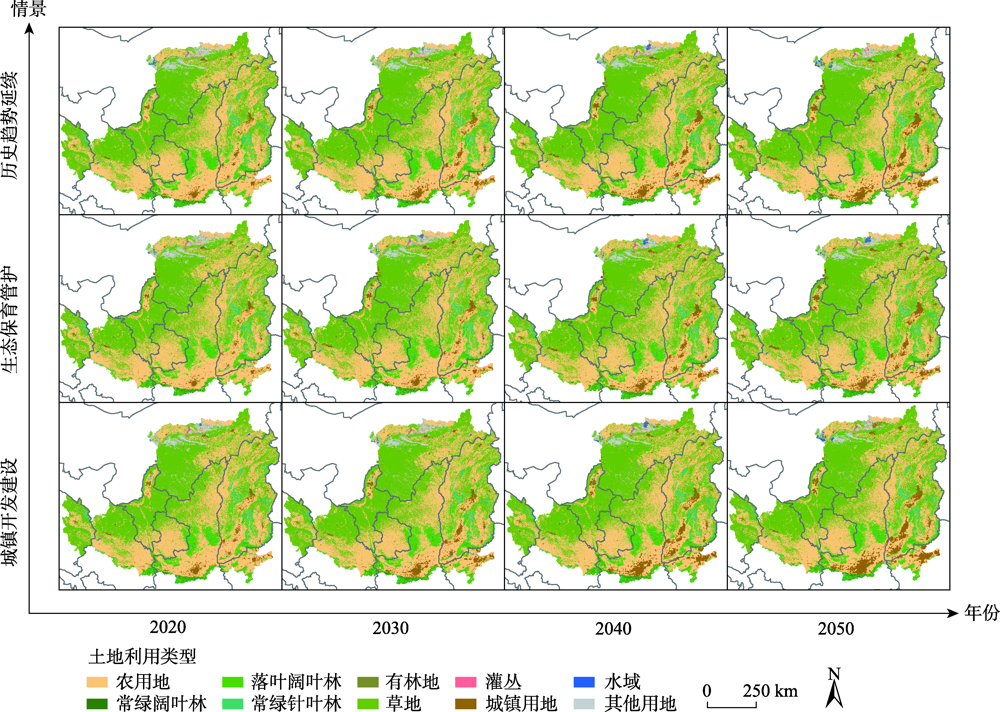
土地利用/覆被的时空变化研究能为区域生态环境恢复和生态系统集成管理提供科学支持。集成Logistic回归模型、改进的Markov与FLUS模型模拟黄土高原2020—2050年3种典型情景土地利用变化。发现各情景土地利用面积变化及空间置换转移主要集中在农用地、草地和城镇用地;历史趋势延续情景下农用地减少15 205 km2,草地、城镇用地分别增加2742 km2和16 007 km2;生态保育管护情景中草地增加7076 km2,林草用地增长存在权衡关系(r主要林地-草地=-0.66),在典型区域的生态恢复管理中应加以重视;城镇发展建设情景中农用地减少20 256 km2,城镇用地增加22 032 km2,变化均达到极值,其中,南部城镇扩张与农用地减少存在强权衡关系(r农用地-城镇用地=-1)。改进的Markov-FLUS模型适用于黄土高原地区的土地利用模拟,情景分析可有效揭示区域生态保护与城镇扩张的阈值变化,为区域土地利用政策权衡管理和水土保育提供科学依据。
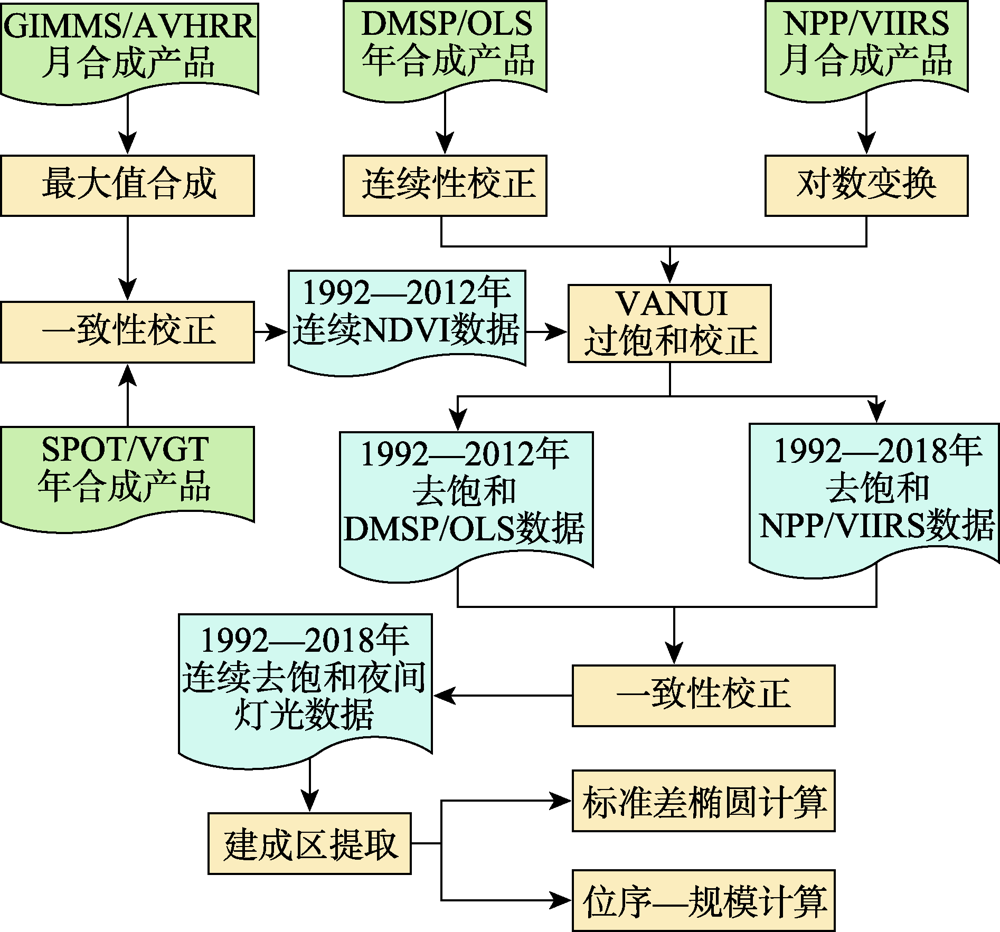
本文基于1992—2012年DMSP/OLS和2012—2018年NPP/VIIRS夜间灯光遥感数据,对长江三角洲城市群时空演化格局进行监测。考虑到不同卫星夜间灯光遥感数据之间的不一致性以及城市核心区亮度过饱和问题,对DMSP/OLS和NPP/VIIRS数据进行连续性校正、去饱和处理和一致性校正,构建长江三角洲区域1992—2018年长时间序列多源夜间灯光遥感数据集。利用二分法基于该数据逐年提取长江三角洲城市群各城市建成区空间分布,计算加权标准差椭圆和Zipf系数进行重心变化和方向性分布变化、规模体系变化等监测。结果表明: ① 本研究采用的连续性校正、去饱和处理和一致性校正方法能够构建稳定的长时间序列多源夜间灯光遥感数据集; ② 基于二分法提取的建成区面积平均绝对误差为6.85 km2,平均相对误差为8.10%; ③ 长三角城市群重心较为稳定,始终在苏州市境内的太湖沿岸附近,呈现出向东南方向移动的趋势城市群呈西北—东南方向分布,且分布方向有向南北方向转动的趋势,标准差椭圆的扁率持续减小,表明城市群的方向性分布减弱; ④ Zipf系数始终在1附近且呈缓慢降低的趋势,城市规模分布较为均衡。
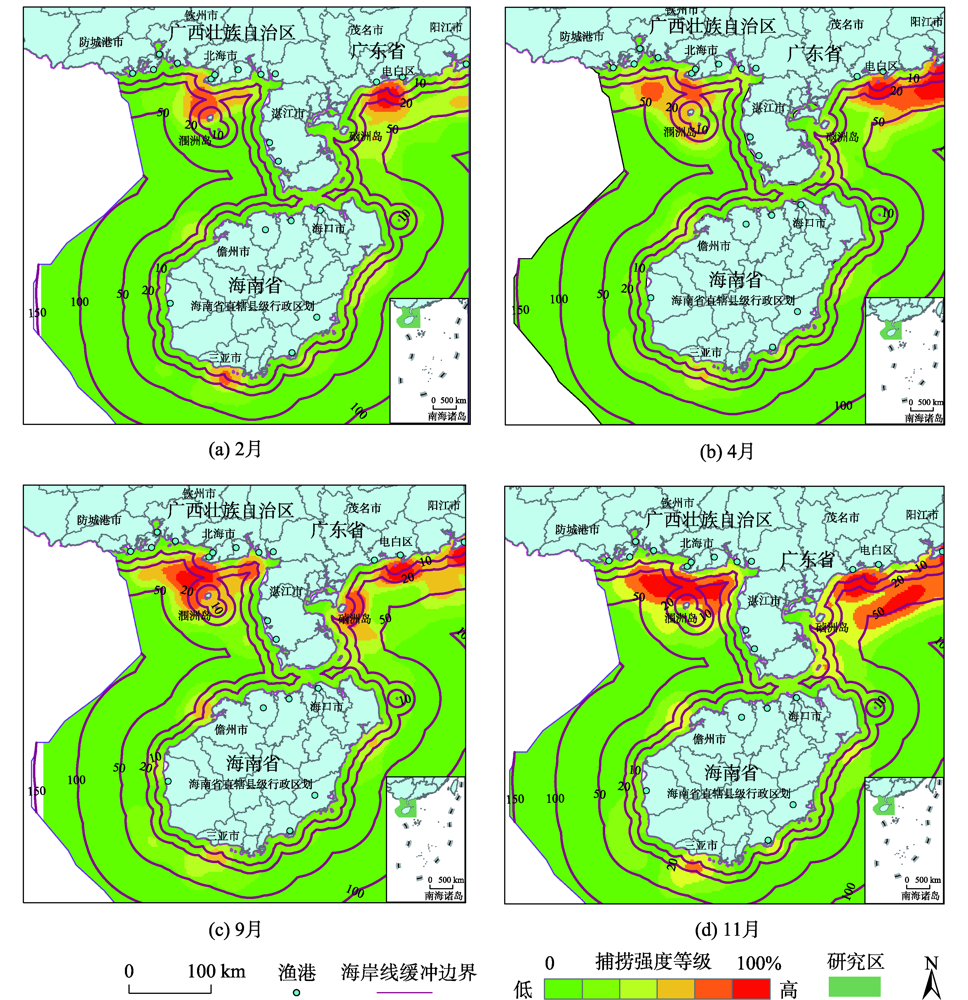
高精度渔业捕捞强度数据是开展捕捞限额管理的前提与关键,也是海洋渔业资源可持续发展的重要保障。因此,本文以挖掘海洋渔业捕捞强度空间特征为出发点,选用2018年2、4、9和11月典型季节的中国籍6364艘渔船1.8亿条高时空粒度AIS数据。运用专家知识经验、空间统计及数据挖掘分析方法,以广西南岸北部湾渔场、广东沿岸和环海南岛周边海域为研究区域,对渔业捕捞强度空间特征展开了细致的挖掘与分析。结果表明:① 广东、广西两省(以下简称“两广”)沿岸海域渔业高强度捕捞主要呈现“团块”向外扩张汇聚成“条带”或“更大团块”的特征,而环海南岛周边主要呈现“团块状”特征;② 受渔业从业人员、渔业作业船舶数量、海洋渔场及海域环境影响,“两广”沿岸近海海域捕捞强度明显高于环海南岛周边海域; ③ 高强度捕捞区域主要集中于近岸30~50 km范围内,且近海捕捞强度高于远海区域,归因于研究区内中小型作业渔船占比较高,达50.9%;④ 渔业捕捞活动受农历传统春节及休渔期等政策因素的影响,春节期间的渔业捕捞强度是所选数据覆盖时间范围中最低的,并且休渔期后(9月)渔业捕捞强度明显高于休渔期前(4月);⑤ 研究区海岸附近的大型渔港对近岸海域的高强度捕捞具有一定的辐射带动效应。本研究通过对高时空粒度的AIS数据进行处理、分析及深度挖掘,可为近岸海洋渔业捕捞强度探析提供重要数据支撑,服务于海洋渔业可持续发展。
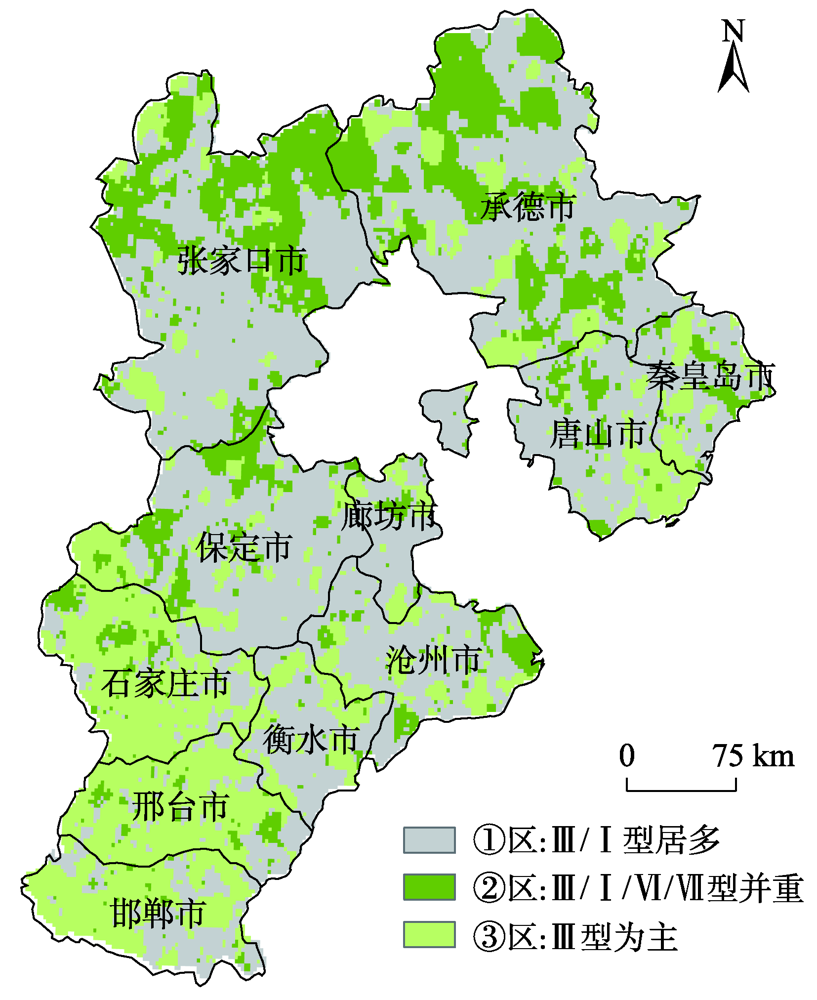
深入挖掘气象站点的观测降雨数据,研究区域降雨的雨型规律,对于洪涝灾害预警和减灾措施制订有重要意义。本文基于河北省2005—2017年3189个站点逐小时降雨观测数据,进行“场雨”的划定,进而提取历史上各场雨的累积雨量、时长指标。采用数据挖掘技术中的DTW相似性算法进行场雨雨型的自动归类,将场雨分成Ⅰ—Ⅶ共7种雨型,包括峰值在前、中、后期的3种单峰型降雨,以及3种双峰型降雨和均匀型降雨,结果显示:河北降雨过程以Ⅰ型前期单峰值降雨、Ⅲ型中期单峰值降雨居多,二者占总降雨场次的70%以上,但空间分布上存在差异;通过K-means聚类,将河北地区分成3个雨型区:① 区, Ⅰ型和Ⅲ型降雨为主,分布在燕山丘陵气候区、冀东平原气候区和山前平原气候区。② 区,Ⅲ型、Ⅰ型、Ⅵ型、Ⅶ型降雨并重,在冀北高原气候区,承德市南部等分散分布。③ 区,Ⅲ型降雨为主,主要分布在石家庄市南部、邯郸市、邢台市大部分地区。本文将DTW相似性算法和K-means聚类方法相结合的数据挖掘技术,可以在未来的气象大数据分析中得到更多的应用。
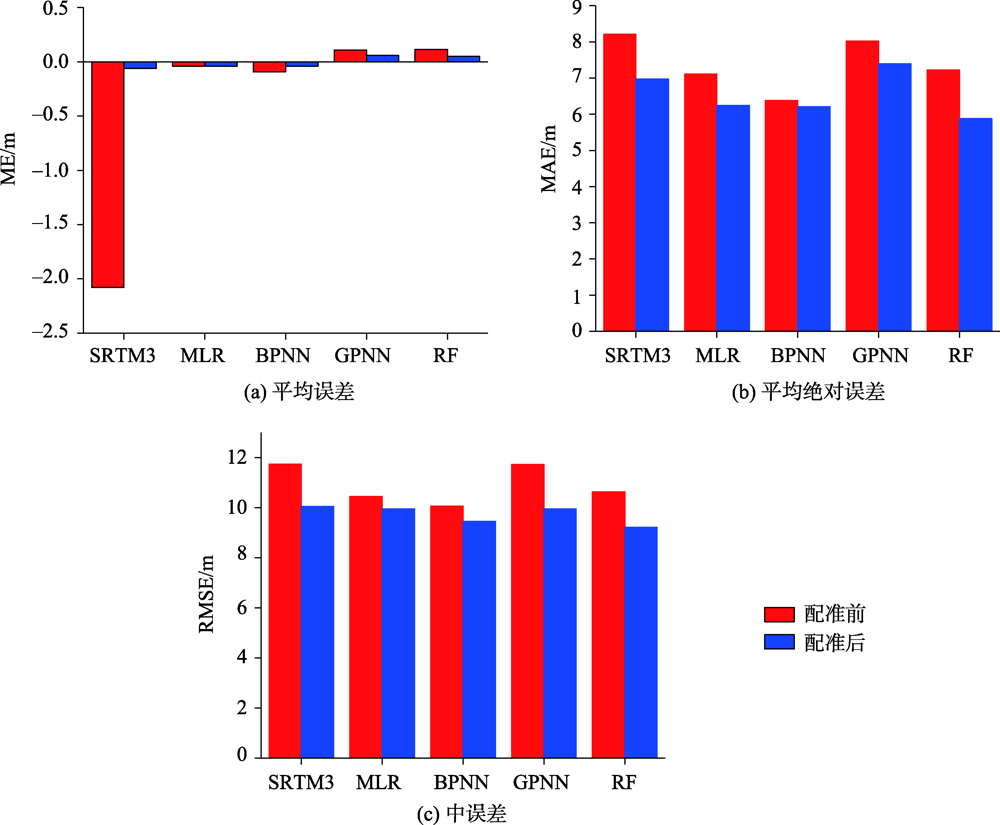
目前,ICESat/GLAS是大尺度SRTM DEM精度评价的主要数据源。然而,现有的精度评价方法均忽略了2组数据的有效配准。为此,本文分析了数据配准前、后SRTM DEM整体精度差异,以及不同地形因子和土地利用类型对SRTM DEM影响程度。在此基础上,充分考虑SRTM DEM精度影响因素,分别借助多元线性回归(MLR)、后向传播神经网络(BPNN)、广义回归神经网络(GRNN)以及随机森林(RF)对SRTM DEM修正。结果分析表明:配准前,ICESat/GLAS与SRTM DEM沿x、y方向的平均水平位移分别为-17.588 m、-29.343 m,高程方向系统偏差为-2.107 m;配准后,SRTM DEM的系统误差基本消除,而且中误差降低了14.4%。配准前,坡向与SRTM DEM误差呈正弦函数关系,配准后这种关系基本消失。SRTM DEM误差均随地形起伏度、坡度、高程的增加呈增大趋势; 6种土地利用类型中,SRTM DEM在林地误差最大,未利用土地误差最小。对配准后SRTM DEM修正表明,RF效果最优,其中误差分别比MLR、BPNN、GRNN降低了3.1%、2.7%、11.3%。
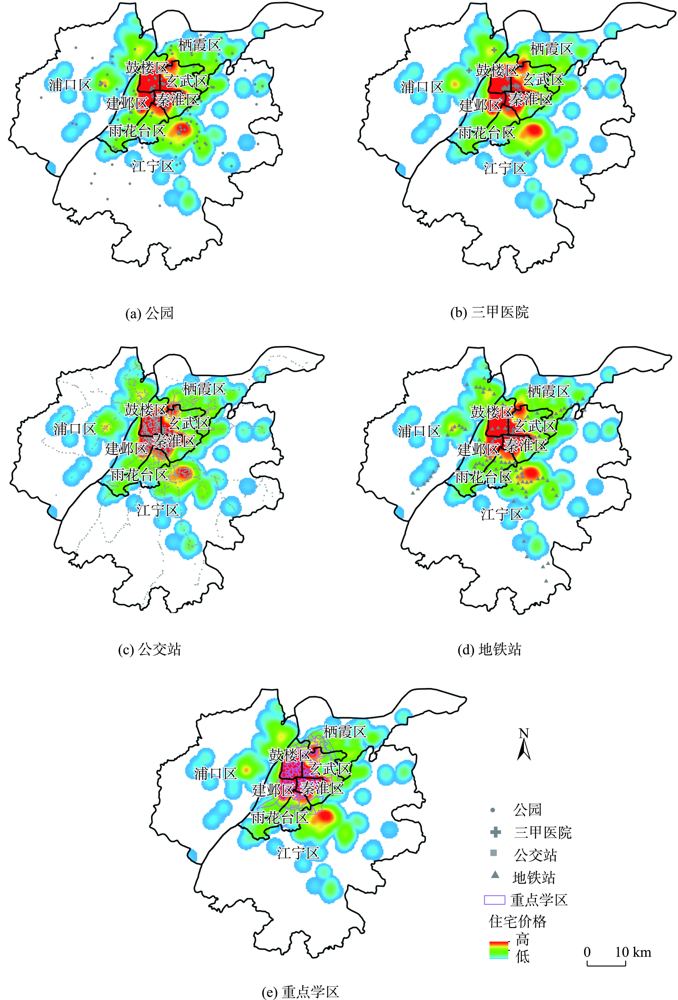
住宅价格影响因素的研究对于购房者购买住房及政府制定相关政策具有重要影响。然而,目前对于住宅价格问题的研究大多从宏观角度进行,而从微观角度入手的相对较少。此外,对住宅价格的研究通常需要建立多元回归方程,但这样会造成多重共线性问题,导致伪回归,不能准确地分析各因素对住宅价格的影响。针对该问题,本文从微观角度出发,运用定量与定性相结合的方法,建立特征价格模型,并且选择逐步回归法对其进行修正,将其中显著性不强、经济意义不明显的变量逐步剔除,从而更准确地探究影响住宅价格的主要因素。本文以南京市住宅价格为实验数据,并初步选择12个影响因素对该方法进行验证。结果表明,该方法能够有效地剔除二级商业中心、建筑类型、生活配套设施3个显著性不强的影响因素,保留重点学校等9个影响较大的因素。本文方法更为精准地分析了住宅价格的影响因素,为购房者购买住房及政府制定相关政策提供了一定的理论基础。
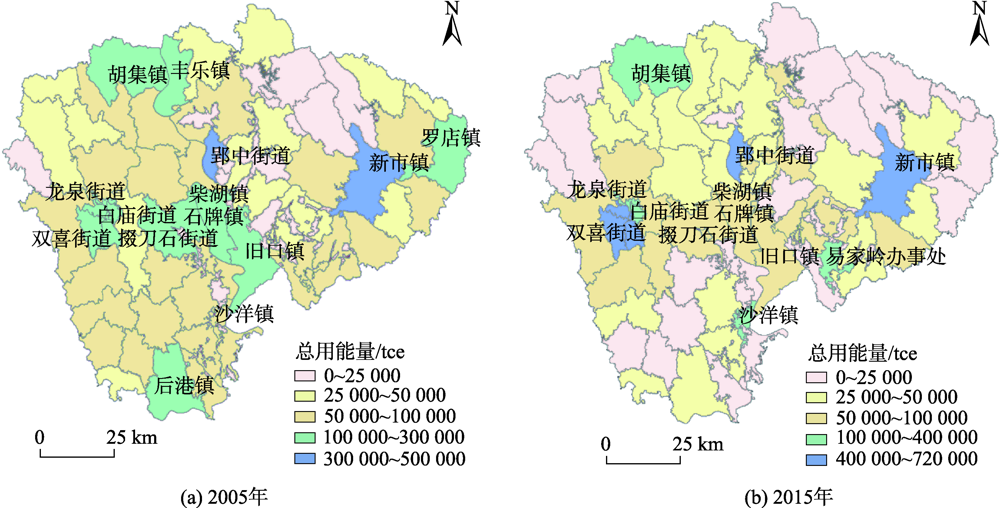
以全球变暖和极端气候为主要特征的气候变化已成为世界各国普遍关注的重大环境问题,全球性的碳排放问题亟待解决已是非常明确的科学共识。然而城市能源消耗尤其是在街道街区尺度能源消耗空间定量化研究目前较少,不利于城市采取精准控制、优化能源结构和减少碳排放措施。本文以资源型城市荆门作为案例城市,以夜间遥感数据、POI等空间数据为基础,定量化分析影响交通、产业和建筑部门碳排放的关键因素车流量、建筑面积和主要用能企业的空间分布数据,实现城市能源消费街道尺度空间可视化,并探讨城镇化和工业化对街道尺度城市能源消费的影响。结果发现工业部门能源消费的持续增长是该市能源消费总量增长的主要驱动因子,72个乡镇(街道)中,以产业能耗为主的10个乡镇(街道)占荆门市能源消费总量达68%。荆门市总用能量在2005—2015年增长82.82万 tce,然而同时用能量高于10 000 tce的乡镇减少了4个,说明荆门市能源消耗提高并呈现集中化趋势。研究结论能够填补以城市或城区为最小单元统计城市能源消费情况所不能发现问题,提出了更加精准的降低荆门市能耗的途径,以期为同类中小资源型城市转型实现绿色发展提供借鉴。
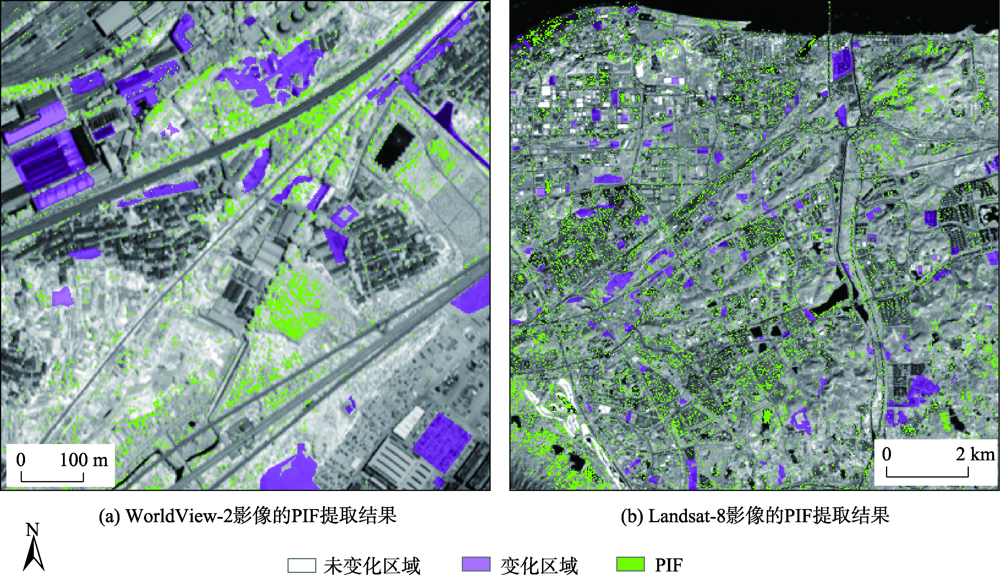
相对辐射校正是遥感变化检测中重要的预处理过程,伪不变地物(Pseudo-Invariant Features,PIF)是多时相影像中相对不变的地物,是相对辐射校正中的重要依据。针对高分遥感图像变化检测中相对辐射校正的要求,本文提出了一个自动提取和优化选择PIF的流程和方法:首先计算两期图像的亮度、光谱特征和空间特征的变化向量,然后对各变化向量的像元值从低到高进行排序,经多数投票后提取PIF,最后使用“迭代线性回归—去除异常值”方法选择获得最终PIF。以2016年11月27日和2017年7月18日的2期“北京二号”高空间分辨率多光谱影像为例,选择地物占比不同的两个实验区对流程和方法进行了验证,并与多元变化检测和迭代加权多元变化检测的PIF提取方法进行了比较。使用两期WorldView-2影像和Landsat-8 OLI影像对方法的适用性进行了验证。结果表明:① 2个实验区提取的PIF精度分别为98.74%和98.71%,PIF像元合理分布于未变化区域、包括了影像中主要的地物类型;② 使用本文方法提取的PIF建立的相对辐射校正模型具有显著的线性拟合效果(p<0.000 1);③ 本文方法考虑了图像亮度、光谱信息以及空间信息的差异,使用参数少,可操作性高;④ 与多元变化检测和迭代加权多元变化检测方法相比,本文方法提取的PIF更为合理,建立的辐射校正方程拟合效果更佳;⑤ 本文方法适用于具有相同波段设置的中、高空间分辨率光学遥感影像。
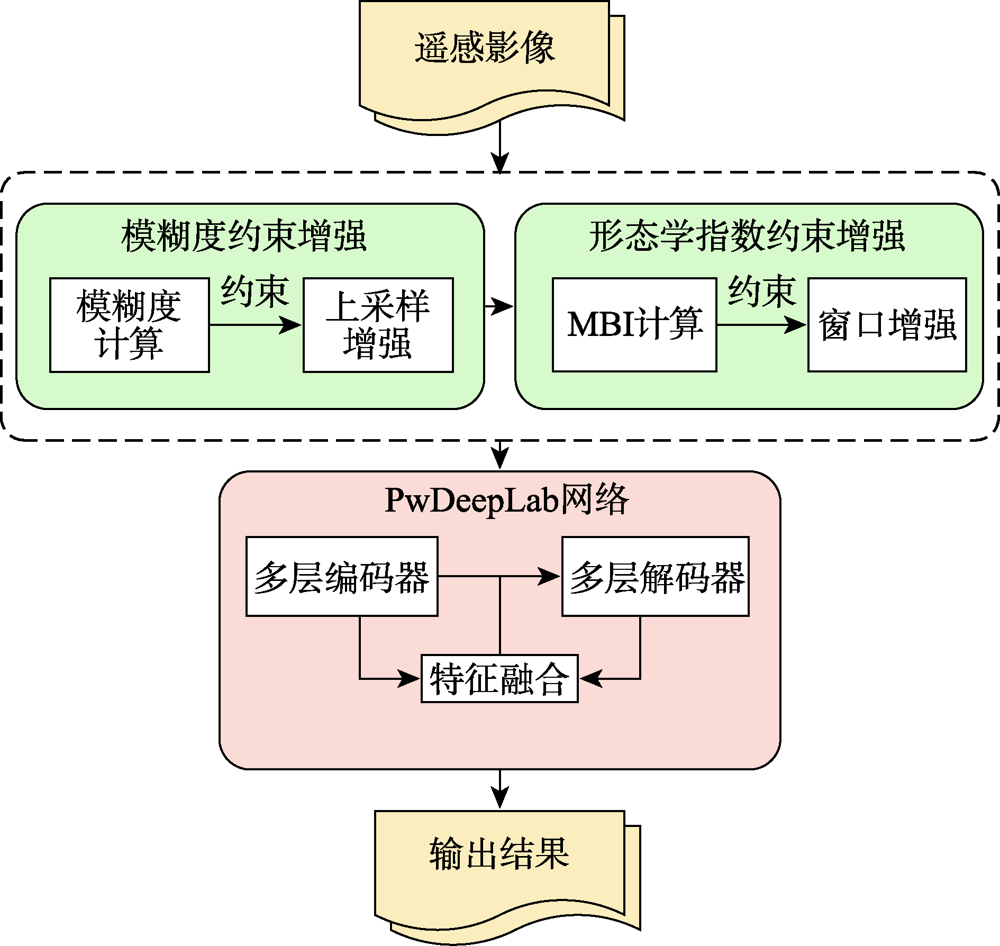
基于高分辨率遥感影像的建筑物提取一直是研究的热点问题,深度学习的深层次特征提取方法,非常适合高分辨率影像中建筑物的提取,但使用深度学习提取建筑物时,大多以改变网络结构为主进行算法优化,很少与其他方法结合。本文研究在改进深度学习网络结构的基础上,结合影像模糊度约束增强、形态学建筑指数约束增强等方法,对建筑物提取方法进行更全面更有针对性的改进。本文主要改进内容为:① 提出PwDeepLab网络,该网络基于DeepLab v3+网络结构,在特征融合方式和损失函数等方面进行了改进。② 提出模糊度约束方法,在固定影像块大小的情况下,通过影像模糊度约束对影像进行上采样增强。③ 提出形态学指数约束方法,通过形态学建筑物指数(MBI)约束范围拉伸增强的方法,在较少改变原始影像特征的情况下,突出建筑信息。本文在Massachusetts数据集和武汉大学的Satellite Dataset Ⅱ(East Asia) 数据集上进行验证, 2个数据集的主要建筑类型存在较大区别。本文提出的方法在2个数据集上的精度相对于DeepLab v3+分别提高了10.9%和3.8%,相对于U-Net分别提高了10.0%和9.6%。实验结果表明本文提出的方法对建筑物提取效果有明显提升,且具有很好的鲁棒性和通用性。
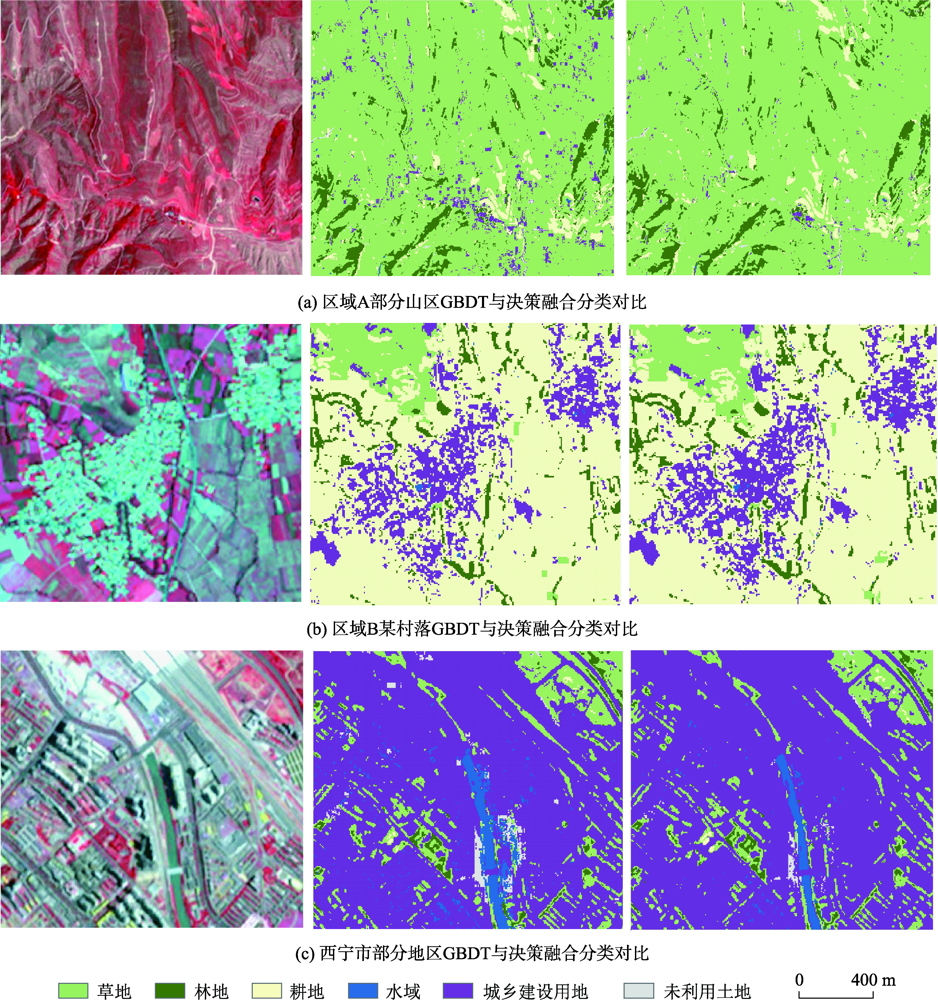
多分类器决策融合方法在提高遥感影像分类的准确性和可靠性方面已表现出了巨大潜力,但这一过程中对所有像元多次分类会产生巨大的时间代价,为改善这一问题,本文提出了主分类器的概念。在青海湟水流域确定2个试验区,对7种常用的分类器进行评估,排除精度较低的3种分类器后,选择支持向量机(Support Vector Machine, SVM)、多层感知机(Multilayer Perceptron, MLP)、随机森林(Random Forest, RF)和梯度提升树(Gradient Boosting Decision Tree, GBDT)4种不同的分类器,建立决策规则共同对SPOT-6影像分类。为提高分类效率,以精度最高的GBDT作为主分类器对影像分类后,仅对结果中可信度不高的像元使用多分类器共同决策。研究结果表明,2个区域内主分类器独立完成分类的像元分别占38.10%和65.26%,错分率为1.57%和2.18%;多分类器共同决策的区域,相比GBDT的分类结果,总体精度分别高出2.49%和3.66%。整体上看,决策融合使2个区域的总体分类精度分别提高了1.18%和1.09%,能够有效减少分类结果中的“椒盐噪声”,精度更加均衡。相比现有的决策融合方法,主分类器的使用在保证分类精度的同时有利于分类效率的提高及分类结果保持良好的一致性。
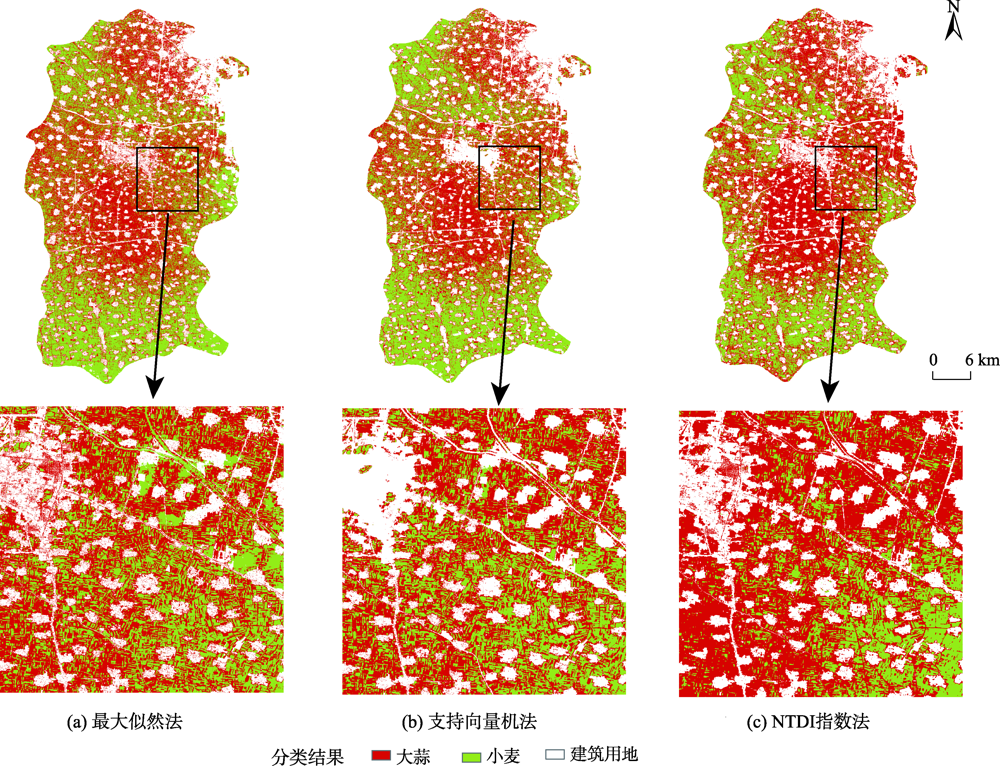
为提高农作物种植信息遥感监测的效率,扩展数据适用范围,本文提出了一种基于时间序列NDVI差异指数的作物种植区提取方法。随着海量遥感与云计算的发展,Google Earth Engine作为一个全球尺度地理空间分析云平台,弥补了单机计算耗时长的不足,为快速遥感分类带来了新机遇。基于Google Earth Engine平台,以河南省开封市杞县为研究区,以2019—2020年杞县地区多时相Sentinel-2影像为数据源,结合物候信息,根据不同作物在时间序列NDVI曲线上的差异构建NDVI时序差异指数,从而提取作物种植区,区分不同作物类型,并与其他方法进行了精度验证和对比。结果表明:① NDVI时序差异指数法以作物物候信息为基础,与GEE高性能的计算能力相结合,形成了作物种植信息快速提取框架,可以方便快捷地进行作物种植区提取,较本地处理具有明显优势;② 杞县冬小麦和大蒜种植区有明显的空间分异性,冬小麦种植区主要集中在研究区西北部以及南部的农村居民点周围,而杞县大蒜则由于产品流通需要,主要集中在研究区中部以及东北部,居民点较为密集,交通便利的城市周边;③ 与时间序列支持向量机法和最大似然法相比较, NDVI时序差异指数进行作物种植区提取的总体精度达到83.72%, Kappa系数为0.67,分别比最大似然法提高了10.02%和0.21,比支持向量机法提高了4.18%和0.09,表明该方法能更高效率,更高精度地提取作物种植信息,实现区域作物种植信息的高效准确监测。总体来看,该方法在一定程度上可拓展遥感数据在农业领域的应用范围,具有推广价值。
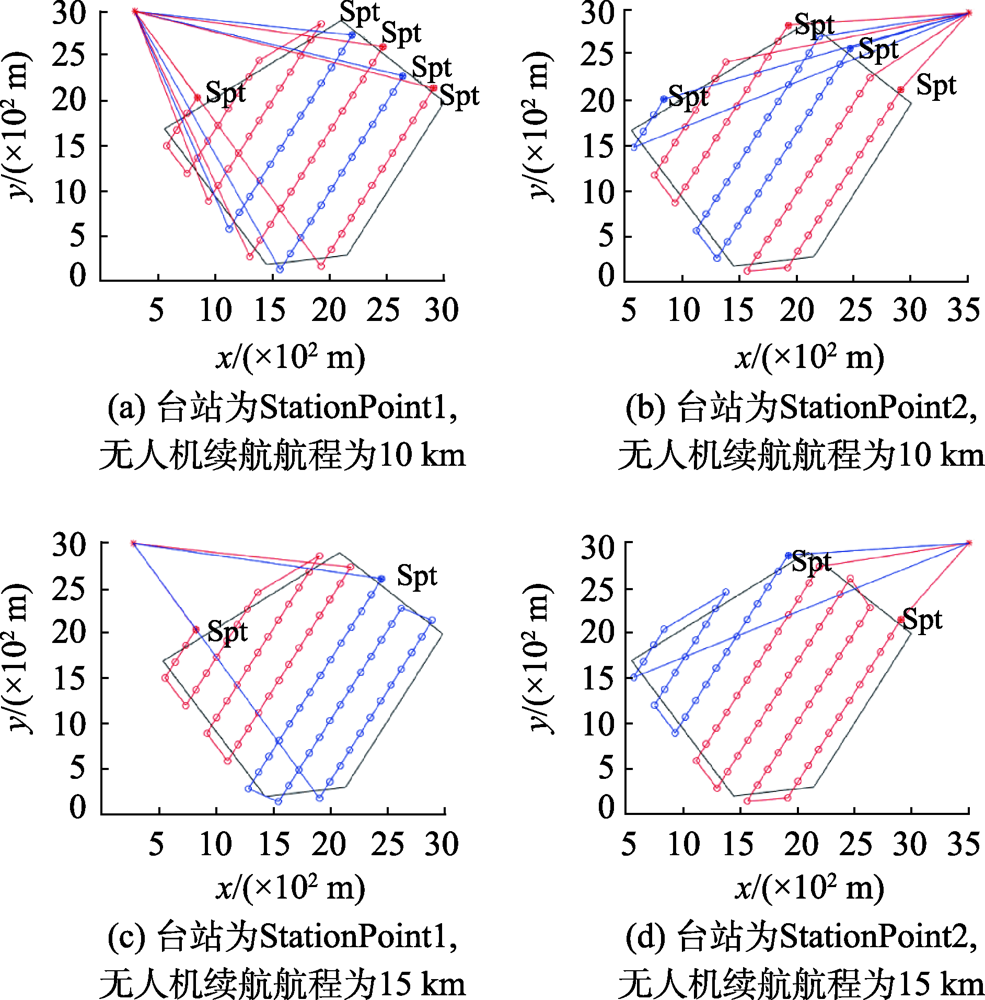
无人机因其灵活、高分辨率等特点在遥感领域中得到了广泛应用,但是目前的无人机遥感多为单机作业,存在缺乏组网协同规划、作业效率有待提高等问题。无人机组网遥感观测能够克服单机作业存在的问题,可以实现多尺度、多平台、多载荷的高频次迅捷组网观测,快速获取大范围的超高分辨率数据,为大范围的生态环境监测、洪涝灾害监测以及国土安全应急监测提供数据支撑。无人机航迹规划能够为高频迅捷的无人机组网观测提供最优航迹。本文针对日益繁杂的航空遥感任务,以及无人机野外台站资源的逐渐完善,提出了基于野外台站的无人机遥感航迹规划模型,以优化后的单机航迹为基础,以无人机数量最少为目标进行多机组网任务分配,旨在解决基于台站的无人机组网航迹规划问题。首先对单机航迹进行优化,将无人机总航程分为有效作业航程和非有效作业航程,通过分析单机作业的任务约束,证明了非有效作业航程最短时作业效率最高,非有效作业航程由转弯航程以及无人机往返于台站的航程决定,因此,确定提高单机作业效率的航迹优化方法:采用“最小宽度”的方法确定最优飞行方向以减少转弯航程,以无人机往返于台站航程最短为原则确定最优的任务起点;其次,以优化后的单机航迹为基础,提出基于台站的无人机组网任务分配算法,考虑每架无人机往返于台站的航程,充分利用无人机的续航能力,以无人机数量最少为目标进行任务分配,从而获得基于台站的无人机组网航迹规化结果。通过仿真分析,验证了本文模型的有效性和正确性。