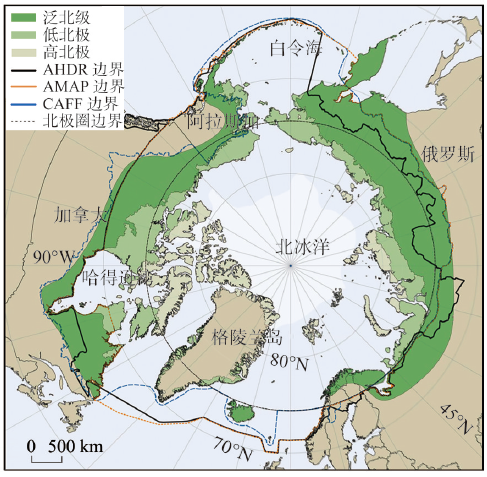
泛北极地区位于北半球高纬度地区,主要属于低温限制型生态系统,因而泛北极地区植被对全球变暖敏感。要明确泛北极地区陆地生态系统对全球变暖响应过程和机理,就需要高精度的植被类型分类数据作为基础资料。但是,目前泛北极地区植被数据的结果还不完善。为更好地认识泛北极地区植被类型分类的现状、发展历史和未来研究方向,本文综述了泛北极地区植被类型制图的数据来源、植被类型划分方法和植被类型制图研究方法。总体而言,泛北极地区的植被调查从20世纪20年代就陆续开展,目前部分区域尺度上的地表覆盖类型的结果,但具体的植被类型制图工作还存在一系列难题。主要原因包括植被野外调查实测数据较少和分布不均、植被类型分类标准不一、苔原植被群落的异质性大、制图技术和分类算法优化困难等。因此,在下一步泛北极植被类型制图工作中,需要制定标准化分类策略,规范数据获取及数据库的整理工作,并发展新的制图方法,从而促进植被类型制图研究工作。
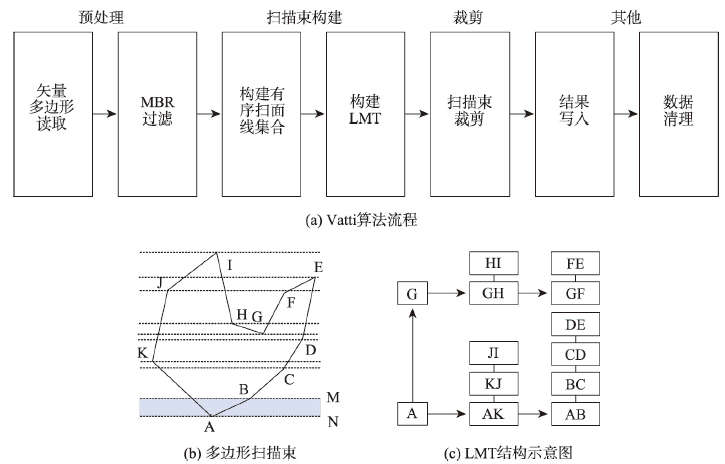
Vatti算法是常用的矢量多边形裁剪算法之一,在其构建扫描束实现交点计算的过程中,二叉树的数据结构和递归计算方法导致其计算效率受矢量多边形边界顶点数量影响显著。本文针对Vatti算法执行过程中较为耗时的扫描束构建环节,提出了一种多边形边界顶点预排序的优化方法——VCS(Vertex Coordinate Pre-Sorting)方法,并基于该方法实现了对Vatti算法的GPU细粒度并行化。VCS方法使用双向链表对Vatti算法原有的二叉树数据结构进行了替换,以较小的额外存储空间取得了多边形边界顶点信息查找效率的明显提升。在GPU环境下采用双调排序算法对多边形边界顶点数组元素进行并行化排序并过滤出有效值,克服了原始算法使用二叉树存储导致效率低下的问题。实验结果表明,改进后的算法与原始算法相比,具有相同的计算精度;当多边形顶点数量为92万,CUDA每个线程块中的线程数量为32时,使用VCS优化方法,与采用CPU计算构建扫描束方法相比,GPU并行化方法获得了39.6倍的相对加速比,矢量多边形叠加分析算法效率总体上提升了4.9倍。
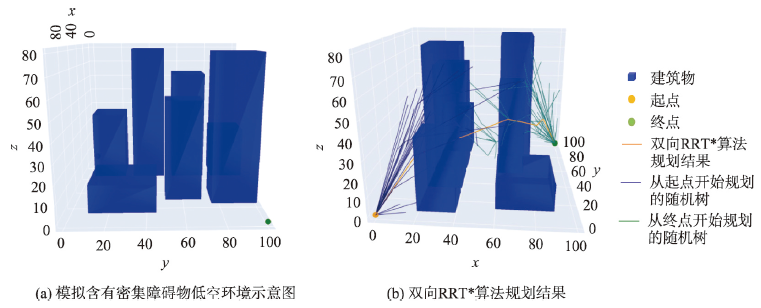
随着无人机监测、巡查和测绘等低空技术得到广泛应用,低空长距离空中路径规划成为低空航空器应用面临的一个挑战。而传统快速扩展随机树(Rapidly-Exploring Random Trees/RRT)及其改进算法在大范围长距离低空三维空间下面临计算效率慢的问题,对此,本文提出一种带有R树空间索引的双向启发式RRT*算法,该算法在双向RRT*算法基础上为随机采样过程设置了启发函数,使得在面对狭小城市障碍物之间空隙时,能够避免局部最小值情况的出现。在此基础上为城市障碍物建立R树空间索引,减少了海量障碍物情况下碰撞检测的时间,提高了低空长距离空中路径规划效率。此外,为了得到更加符合无人机运动规律的路径,提高算法的实用性,在采样过程中设置转弯阈值控制转弯角度,并且对规划结果路径使用3次B-spline函数进行路径平滑。最后在武汉市三维城市场景中,利用武汉市建筑物数据进行了实验,实验证明相比已有算法,本文提出的带有R树空间索引的双向启发式RRT*算法相比较RRT算法和双向RRT*算法在500 m、 2000 m、 10 000 m不同距离下规划时间均降低了90%以上;采样次数相比RRT算法在不同距离下分别降低了51.6%、75%、86.7%,相比双向RRT*算法在不同距离下分别降低了20%、24.7%、57.3%;转弯次数相比RRT算法在不同距离下分别降低了77.3%、73.5%、78.3%,相比双向RRT*算法在不同距离下分别降低了37.5%、30.8%、16.8%;同时带有R树空间索引的双向启发式RRT*算法得到的结果路径长度相比其他2种算法也有缩短。该算法应用于低空长距离空中路径规划能够有效提高计算效率,降低规划时间,减少采样次数,缩短结果路径,减少转弯次数,丰富无人机的应用场景。
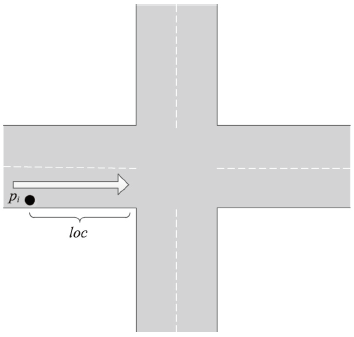
浮动车轨迹数据已逐渐成为城市交通状态识别的主要数据源之一,但是现有基于浮动车轨迹数据的交通状态识别中多数是应用高精度或是多源轨迹数据。针对稀疏轨迹数据在城市交通状态识别中存在识别精度不高的问题,本文提出一种结合戴维森堡丁指数(DBI)和轨迹相似性度量的动态交通状态划分方法。首先,对轨迹数据和路网数据进行预处理并且建立不同时间片的路段轨迹集合;接着,依据轨迹速度-空间相似性,利用戴维森堡丁指数动态地扩展轨迹的空间维度,并根据轨迹相似性度量方法构建最佳车辆队列;然后,将前后不同的车辆队列进行二次处理,连接组成交通流簇;最后,基于模糊C均值聚类方法将交通流进行划分,实现路段交通状态的识别。采用厦门市厦禾路、湖滨西路和湖滨南路交叉路段上的真实出租车轨迹数据进行测试,结果表明,本文所提方法保证了车辆队列速度分布与原始轨迹速度分布基本一致,相比对比方法Kmeans++和ST-DBSCAN,本文方法均方根误差平均下降了18.77%和21.22%,并且在不同的实验路段表现更加稳定,可有效、可靠地运用稀疏轨迹数据识别城市交通状态,进而实现城市交通状态的精细分析。
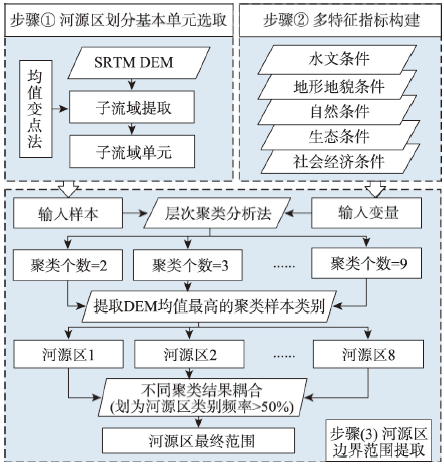
河源区边界是重要的国家基础地理信息之一,但除长江、黄河等大江大河外的我国大部分其他中小流域仍缺乏确切的河源区边界信息,需要科学划定河源区边界以支持流域水生态保护相关政策的规划与实施。对此,本文在确立河源区划分原则、明确划分依据的基础上,提出了基于多特征指标和层次聚类分析法的河源区边界划定方法。以沁河流域为研究案例,首先利用均值变点分析法计算沁河流域子流域提取的最佳汇流累积量分位数阈值为0.15%,再基于子流域的多特征指标运用层次聚类分析法最终确定河源区范围边界,并将该方法应用于长江、黄河流域进行验证分析。结果表明:① 基于多特征指标和层次聚类分析提取的沁河流域河源区范围处于河底比降法、水文站点方法得到的源区范围面积之间;② 该方法在长江、黄河流域河源区划分结果的交并比分别达到85.40%和79.99%,侧面验证了本文方法进行河源区边界划分的合理性与适用性。基于多特征指标和层次聚类分析的河源区边界自动划分方法可以简捷高效地识别缺乏明确河源区边界信息的流域河源区范围,为我国河源区生态安全屏障识别、水资源保护相关政策的规划和实施提供科学支撑。
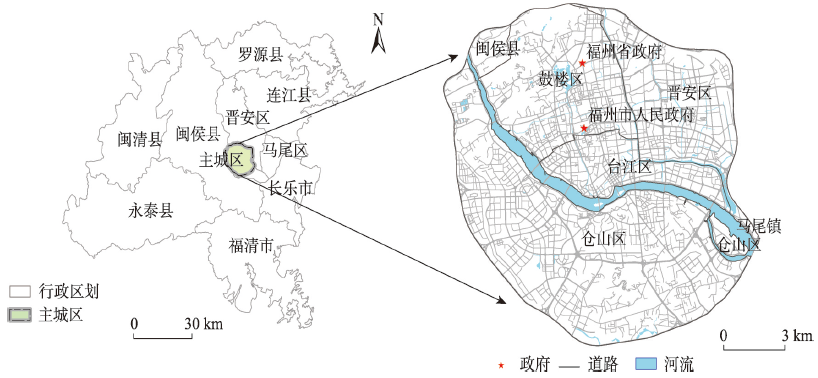
由于城镇化发展迅速、居民对医疗服务需求的提高,使得城市人口密集区域医疗服务压力增大,因此进行医疗服务设施可达性分析具有重要意义。本文以福州市主城区为例,医疗数据来自于福州市卫健委,利用爬虫技术获得小区户数进行人口估算,基于早、中、晚各时段的实时路况信息,计算居民点到医疗服务设施的最优路径旅行时间,并绘制医疗服务等时区,利用高斯距离衰减函数改进的两步移动搜法(Gaussian-Two Step Floating Catchment Area Method, Ga-2SFCA),考虑出行模式,对福州市主城区二级以上医院进行可达性分析。结果表明:① 驾车出行模式下,医疗服务覆盖率和居民就医可达性要明显好于公共交通出行模式;② 驾车出行模式下,医疗服务可达性受出行时段影响较大;而公共交通出行方式下,各时段差异较小;③ 随着时间阈值的增大,居民点的医疗服务可达性等级提升,且高等级可达性范围逐渐扩大;④ 驾车模式下的医疗可达性空间分布和道路保持一致,呈现出“环线层次”的现象;而公共交通模式下的可达性空间分布由于受到城市公交微循环系统的影响,呈现出“轴向扩张”的现象。
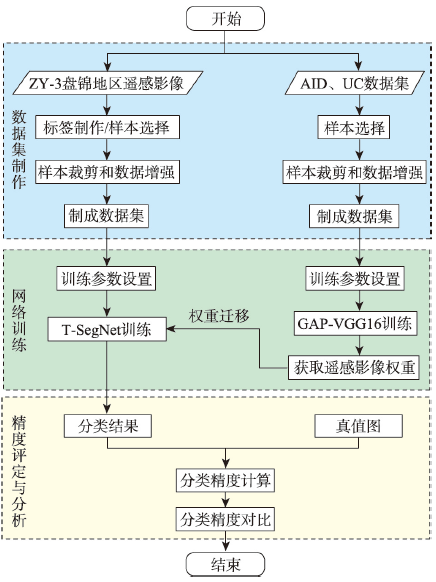
面对实际的遥感影像分类任务,采用深度神经网络的方法存在的最大问题是缺乏充足的标注样本,如何使用较少的标注样本实现较高精度的遥感影像分类,是目前需要解决的问题。ImageNet作为世界上最大的图像识别数据集,在其上训练出的模型有着丰富的底层特征。对ImageNet预训练模型进行微调是最常见的迁移学习方法,能够一定程度利用其丰富的底层特征,提高分类精度。但ImageNet影像特征与遥感影像差距较大,对分类效果提升有限。为了解决上述问题,本文基于传递迁移学习思想,结合深度神经网络,提出一种基于深度传递迁移学习的遥感影像分类方法。该方法通过构建以开源遥感场景识别数据集为源域的中间域,并以ImageNet预训练权重为源域、待分类遥感影像为目标域进行迁移学习,提高遥感影像分类精度。首先,以ImageNet预训练VGG16网络为基础,为加速卷积层权重更新而将全连接层替换为全局平均池化层,构建GAP-VGG16,使用中间域数据集训练ImageNet预训练GAP-VGG16以获取权重;然后,以SegNet网络为基础,在SegNet中加入卷积层设计了T-SegNet,以对获取的权重进一步地提取。最后,将获取的权重迁移到T-SegNet中,使用目标域数据集训练,实现遥感影像分类。本文选取Aerial Image Dataset和UC Merced Land-Use DataSet作为中间域数据集的数据源,资源三号盘锦地区影像为目标域影像,并分别选取了50%和25%数量的训练样本进行实验。实验结果表明,在50%和25%数量的训练样本下,本文方法分类结果相比SegNet的Kappa系数分别提高了0.0459和0.0545,相比ImageNet预训练SegNet的Kappa系数分别提高了0.0377和0.0346,且在样本数较少的类别上,本文方法分类精度提升更明显。
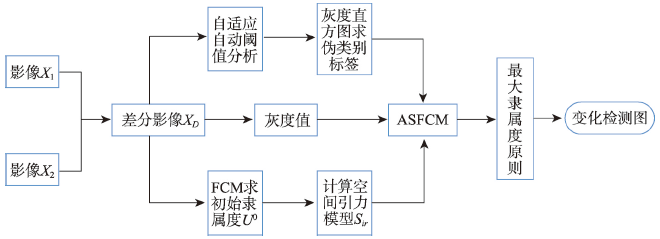
遥感变化检测是开展对地观测应用的关键技术之一,在城市研究、灾害评估以及资源调查等领域发挥着重要的作用。本文针对基于差分影像的遥感变化检测展开研究,提出一种基于自适应半监督模糊C均值(Adaptive and Semi-Supervised Fuzzy C-means, ASFCM)聚类的变化检测技术。① ASFCM根据“差分影像像素灰度值越大,则对应区域发生变化可能性越大”的性质,通过阈值技术自适应、自动地分析差分影像灰度直方图并将其划分为两部分:几乎可确定类别区域和不确定区域;② 将差分影像像素灰度值、空间上下文信息和几乎可确定类别区域像素的伪类别标签信息集成到模糊聚类过程,生成差分影像的模糊隶属度函数;③ 通过最大隶属度原则生成变化检测图。ASFCM通过半监督策略利用伪类别标签信息指导聚类过程,通过空间引力模型优化的模糊因子自适应地利用差分影像的空间相关性,能够得到更加准确的模糊隶属度函数和更优的变化检测结果。3组真实遥感数据的实验结果验证了ASFCM的有效性:ASFCM在Bangladesh数据上的kappa系数为0.9188,比其它方法提高3.5%~16.4%;在Madeirinha数据上的Kappa系数为0.9379,比其他方法提高2.18%~7.13%;在黑龙江数据上的Kappa系数为0.8696,比其它方法提高2.88%~22.02%。
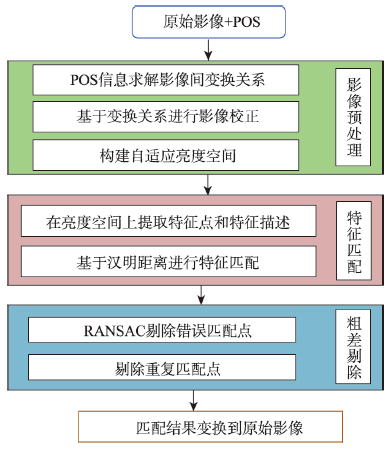
特征匹配是面阵摆扫式航空影像处理的关键步骤,针对传统特征匹配方法在面阵摆扫式航空影像匹配时存在匹配点数量少,分布不匀均的问题,本文提出一种基于自适应亮度空间的特征匹配方法。首先根据影像POS(Postion Oriental System)信息求解待匹配影像间变换关系进行影像校正,在校正后的影像上构建自适应亮度空间,使用ORB算子和BEBLID算法在亮度空间上获取特征点和二进制特征描述符,然后基于汉明距离获取初始匹配点,使用RANSAC算法剔除粗差,最后将匹配点变换到原始影像上得到最终匹配结果。本文选取6组具有视角差异及亮度变化的面阵摆扫式航空影像进行实验,将本文算法与SIFT、SURF、ORB、ORB+BEBLID、ASIFT等匹配方法进行比较,结果表明:本文算法通过建立影像间变换关系,构建自适应亮度空间,使得算法提取的特征点数量增加1.5倍,获取匹配点数量是其他算法的3倍以上,且匹配点分布更加均匀,匹配效率高于其他算法,验证了本文算法在具有亮度变化及视角差异的面阵摆扫式航空影像上匹配的有效性。
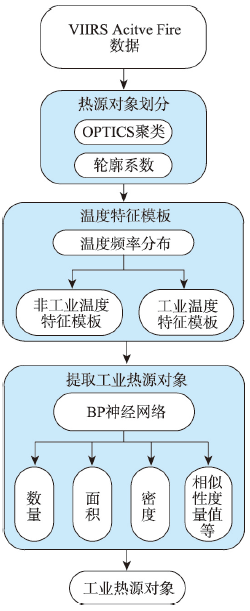
针对年尺度热异常数据提取工业热源的方法存在数量和空间精细化程度不足的问题,使用VIIRS Active Fire数据,提出了一种基于温度特征模板的BP神经网络工业热源提取方法。该方法以京津冀及周边地区为试验区,首先,根据工业热源空间聚集性特征,使用OPTICS算法划分热源对象;其次,根据热源的热辐射特征,构建工业热源与非工业热源温度特征模板;最后,以温度特征模板、热源统计特征等作为参数,使用BP神经网络提取工业热源对象。结果表明:① 本文提出的基于温度特征模板的BP神经网络算法的工业热源提取精度达到了96.31%,与时间滤波、逻辑回归方法相比较,工业热源提取精度分别提高了8.45%、7.53%;② 2015—2020年京津冀及周边地区6省市工业热源数量整体减少了27.46%;河北省工业热源对象数量和热异常点数量年均减少了8.06%和7.44%,相对于其他省市减少幅度最大;山东、天津的工业热源集中度分别提高了25.72%、86.64%,说明两地工业转型升级政策取得较显著成效;③ 唐山、邯郸、吕梁和长治4个城市工业热源对象数量占试验区全部的31.37%,为京津冀及周边地区工业热源主要分布城市;临汾、太原等7个城市工业热源聚集程度和能源消耗程度高于其他城市;北京、周口等11个城市工业热源聚集程度和能源消耗程度低于其他城市;④ 2020年1—5月,京津冀及周边地区工业热异常点数量相对于2019、2021年同期保持不变或增加,新冠疫情对试验区工业热源无显著影响;2020年1、2月武汉工业热异常点数量与2019、2021年同期相比数量减少了66.67%以上,2020年3—5月工业热异常点数量低于2019年同期,2020年1—5月新冠疫情对武汉市工业热源影响显著。该研究反映了京津冀及周边地区工业热源发展的现状及趋势,能够为降低能耗和提高第二产业集中度等相关政策的制定与调整提供有价值的参考。
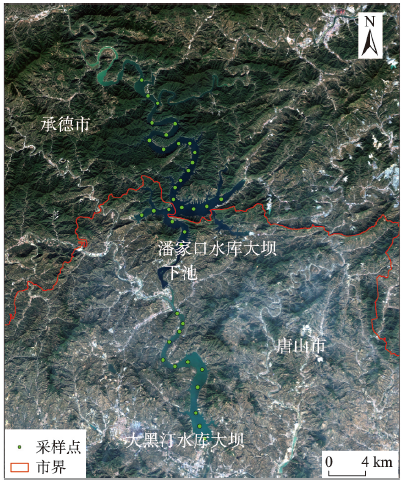
GF-6 WFV影像具有宽覆盖、高时空分辨率、高光谱分辨率等特点,目前在农业和林业遥感领域都有一定应用,但是在水质遥感中的应用潜力还缺乏系统的评估。本文以潘家口和大黑汀水库为研究区,采用2019年9月24—25日获取的潘家口和大黑汀水库叶绿素a浓度、实测遥感反射率和准同步GF-6 WFV影像,构建了潘家口和大黑汀水库叶绿素a浓度经验反演模型,探索GF-6 WFV在内陆水体叶绿素a浓度遥感监测中的应用潜力。研究结果表明,基于GF-6 WFV模拟光谱构建的潘家口和大黑汀水库叶绿素a浓度经验模型决定系数均在0.90以上,GF-6 WFV影像在水体叶绿素a遥感监测中具有应用潜力,尤其是新增的黄波段和红边波段1,有助于提高GF-6 WFV影像叶绿素a浓度遥感监测能力;GF-6 WFV影像大气校正误差降低了叶绿素a浓度遥感监测精度,GF-6 WFV影像水体大气校正精度有待改进,以提升GF-6 WFV影像水质遥感监测能力。
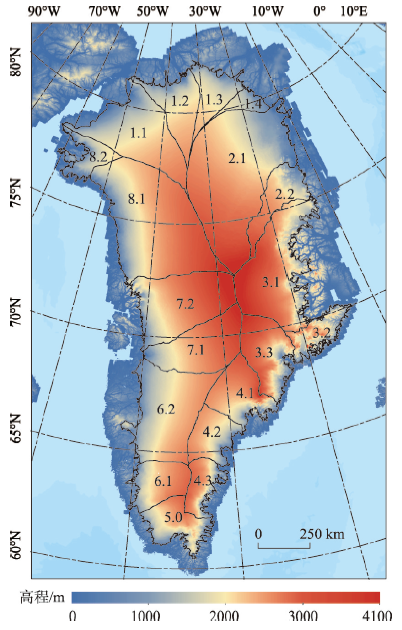
格陵兰冰盖是影响全球气候变化的重要因素之一,其微小变化会引起海平面的显著变化,因此定量研究其物质平衡具有重要的科学意义。利用最新发射的ICESat-2卫星激光测高数据(2018年11月至2019年9月),联合ICESat数据(2003年2月至2009年10月),估算2003年2月至2019年9月格陵兰冰盖物质平衡。首先通过交叉点法得到冰盖表面的高程变化,再根据积雪堆积、表面融化和动力变化等物理过程计算密度值,最后经过粒雪含量、冰后回弹和弹性回弹校正计算物质平衡,并针对不同的冰川水文流域进行空间差异性分析。结果表明:① 2003—2019年格陵兰冰盖主体的平均高程变化为-11.27 ± 0.83 cm/yr;② 高程2000 m以下的冰盖呈较大的消融趋势,高程最大消融速率为-6.0 m/yr,总体积变化速率为-206.0 km3/yr, 2000 m以上的冰盖呈上升趋势,高程最大累积率为1.1 m/yr,总体积变化率为14.2 km3/yr;③ 校正后触地冰的总物质平衡为-195.2 ± 13.1 Gt/yr,其中东南部和西北部流域消融量较大,仅有东北部流域呈累积趋势;④ 2003—2019年格陵兰温度整体处于上升趋势,最大变化率为0.8 K/yr,降水在东部和西北部呈下降趋势,最大变化率为-0.1 mm/yr,在一定程度上加速了冰盖消融。
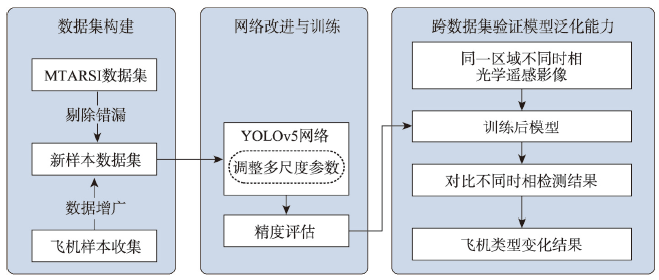
飞机类型检测是遥感影像分析领域的研究热点,在机场监控和情报分析等应用中起着重要的作用。其中,深度学习方法作为遥感影像分析领域广泛应用的手段之一,在飞机类型检测任务中仍面临许多问题,如使用未公开的自制数据集、实验复现困难、无法验证泛化能力等。同时,光学遥感影像易受光照条件、云雨变化等因素影响,使检测任务更加困难。为了解决这些问题,本文首先利用MTARSI数据集对样本进行筛选,再结合Google Earth等开源方法收集飞机影像,采用随机旋转、改变亮度等方法构建新的飞机类型检测数据集。其次,采用YOLOv5作为基础网络框架,针对其多层卷积和池化操作可能会削弱或完全丢失飞机特征的问题,进行多尺度优化训练,有效检测飞机类型特征。最后,利用跨数据集验证模型的泛化能力。实验结果表明,本文方法能准确、有效地检测出光学遥感影像中的飞机的具体类型,具有较强的鲁棒性和泛化能力,跨数据集进行飞机类型检测正确率达到82.12%,可为智能化的飞机目标语义分析、星上应用等研究提供技术支撑。
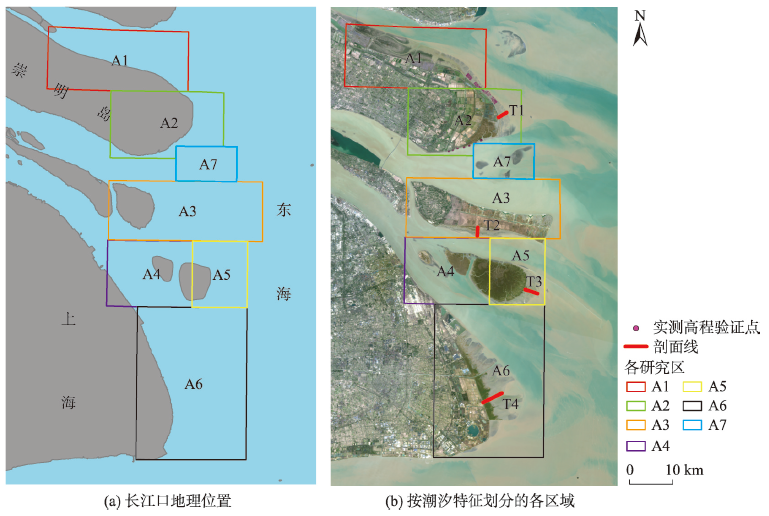
潮滩是陆地与海洋之间重要的生态过渡地带,具有复杂的生态过程和重要的服务功能。受陆海交互作用及人类活动的影响,潮滩处于高度动态变化过程中,而传统测绘技术受到潮滩可达性影响无法快速获取潮滩地形信息。为解决潮滩高程数据获取困难的问题,本文提出一种基于潮汐动态淹没过程和时序遥感影像的潮滩地形信息提取算法,利用K-means++聚类方法实现水域提取,并通过时序淹没特征计算潮滩淹没频率提取潮滩范围信息,最终综合区域潮汐特征反演潮滩地形。研究以崇明东滩为例,利用2016—2020年所有可用Sentinel-2和Landsat-8时序遥感影像,实现潮滩范围提取与高程反演,并通过实测高程数据进行精度验证。研究结果表明,潮滩范围提取总体精度为97.73%,F1_score为0.98;高程反演平均绝对误差为0.15 m,潮滩高程的反演精度与可用影像的数量呈正相关。研究利用该算法进一步反演长江口地区主要潮滩地形特征,结果表明区域内潮滩面积为346.93 km2,高程范围为1.00~3.84 m,且与现有潮滩范围数据集相比,本研究提取的长江口潮滩范围更为完整。该算法为潮滩地形的快速反演提供了可能,对潮滩资源动态监测和管理具有重要意义。