
基于虚拟特征点的三维激光点云粗配准算法
作者简介:李 鹏(1988-),男,硕士,主要从事摄影测量与遥感应用研究。E-mail: peng_li6789@163.com
收稿日期: 2017-10-30
要求修回日期: 2018-01-27
网络出版日期: 2018-04-20
基金资助
国家自然科学基金项目(41371436)
基于LDA模型的机载LiDAR多特征地物提取(SKLGIE2016-M-3-1)
信息工程大学优秀青年基金项目(2016610902)
A Three-dimensional Laser Point Cloud Rough Registration Algorithm Based on Virtual Feature Points
Received date: 2017-10-30
Request revised date: 2018-01-27
Online published: 2018-04-20
Supported by
National Natural Science Foundation of China, No.41371436
Multi-feature Extraction of Airborne LiDAR Based on LDA Model, No.SKLGIE2006-M-3-1
Information Engineering University Outstanding Youth Fund Project, No.2016610902.
Copyright
在地面三维激光点云特征提取的过程中,由于三维点云数据采集仪器、采集方法及后期处理等因素影响,依靠传统的基于曲率、法线等几何特征及统计学算法提取出的点云特征数量较多且存在较大误差,若使用其直接作为特征点数据进行点云粗配准,很难提高点云粗配准的精度及速度。因此,本文在对点云数据实际空间分布结构分析的基础上,结合特征点提取算法、法向一致化算法、PCA(Principal Component Analysis)方法及特征点聚类等方法,提出了一种三维激光点云数据虚拟特征点拟合算法。该算法生成的虚拟特征点是由点云实际的特征点拟合得到,或是由位于被测物特征线上的特征点拟合生成的特征线计算得到,该虚拟特征点并不是扫描对象上实际存在的激光反射脚点。通过实验验证,虚拟特征点拟合算法可以较准确地拟合出由于设备及操作方法等原因而未被采集到的建筑物边角点数据,得到的虚拟特征点数据较实际特征点数据具有更少的数据量及更高的精度,使用拟合得到的虚拟特征点可以减少粗配准算法的计算量,提高粗配准算法的计算效率并能获得更精确及可靠的初始配准变换参数。
李鹏 , 邢帅 , 李瑾 , 何华 , 王丹菂 , 李鹏程 . 基于虚拟特征点的三维激光点云粗配准算法[J]. 地球信息科学学报, 2018 , 20(4) : 430 -439 . DOI: 10.12082/dqxxkx.2018.170493
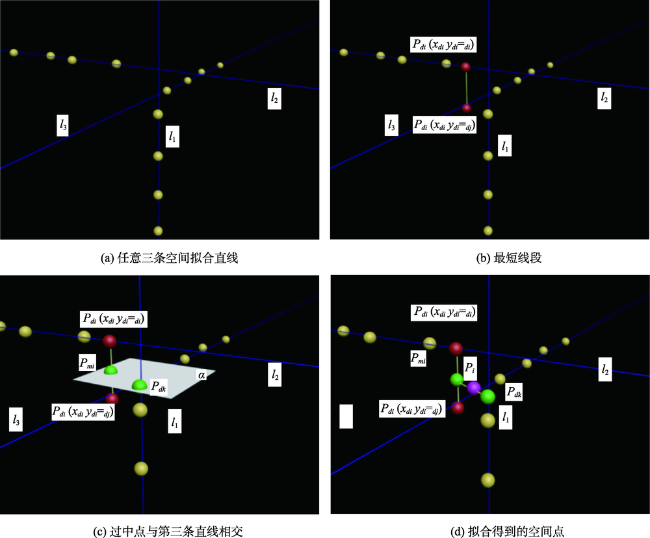
Due to the influence of the 3D point cloud data collection instrument, acquisition method and post-processing, the number of point cloud features extracted from statistical algorithm base on geometric features such as the curvature and normal is quite large and with large errors. Using these features for rough cloud point registration, it is difficult to improve the precision and speed of rough cloud point registration. Since the accurate registration algorithm of point cloud data, such as ICP (Iteration Closest Point), 3D-NDT (3-Dimensional-Normal Distributions Transform) and GMM (Gaussian mixture model), works in a narrow registration range, the proper initial transform parameters are requested to essentially improve the speed and accuracy of the algorithm, otherwise it will cause the exact registration algorithm to fall into local optimum or result in registration failure. By analyzing actual spatial distribution of point cloud data, we find that it is difficult to collect accurate point, line feature and plane features information of point cloud or the accuracy of the collected key features is very low due to collection instruments, acquisition methods and post-processing and other factors. Therefore, combined with the method of feature point extraction, principal component analysis (PCA) and feature point clustering, this paper presents a virtual feature point fitting algorithm. Based on the commonly used feature point extraction algorithm, this algorithm uses segment endpoints of an average of more than 3 lines that are not parallel and the endpoints in the range domain ε1 or adopt the distance weighted calculation to complete the virtual feature points fitting. Another way is to use the feature points to fit lines by the least squares method, and then according to the principle of the smallest two norms, 3 or more non-parallel lines whose distance each other is less than ε2 is used to fit the virtual feature points whose distance to those lines is shortest. The virtual point feature generated by the algorithm is calculated from the actual feature points of the point cloud and the feature lines generated by fitting the feature points. It is not the actual laser reflection foot point on the scanned object. Through experimental verification, the virtual feature point algorithm can be more accurate to fit the corner point data of building which cannot be collected due to equipment and operating methods and other reasons. The virtual point feature data obtained by the algorithm is 64.71% less than the actual feature point data amount, the computing speed increased by 41.90%, and accuracy was improved by an order of magnitude. Using the fitted virtual feature points can reduce the amount of data involved in the coarse registration algorithm, improve the computational efficiency of the coarse registration algorithm and obtain more accurate and reliable initial transformation parameters.
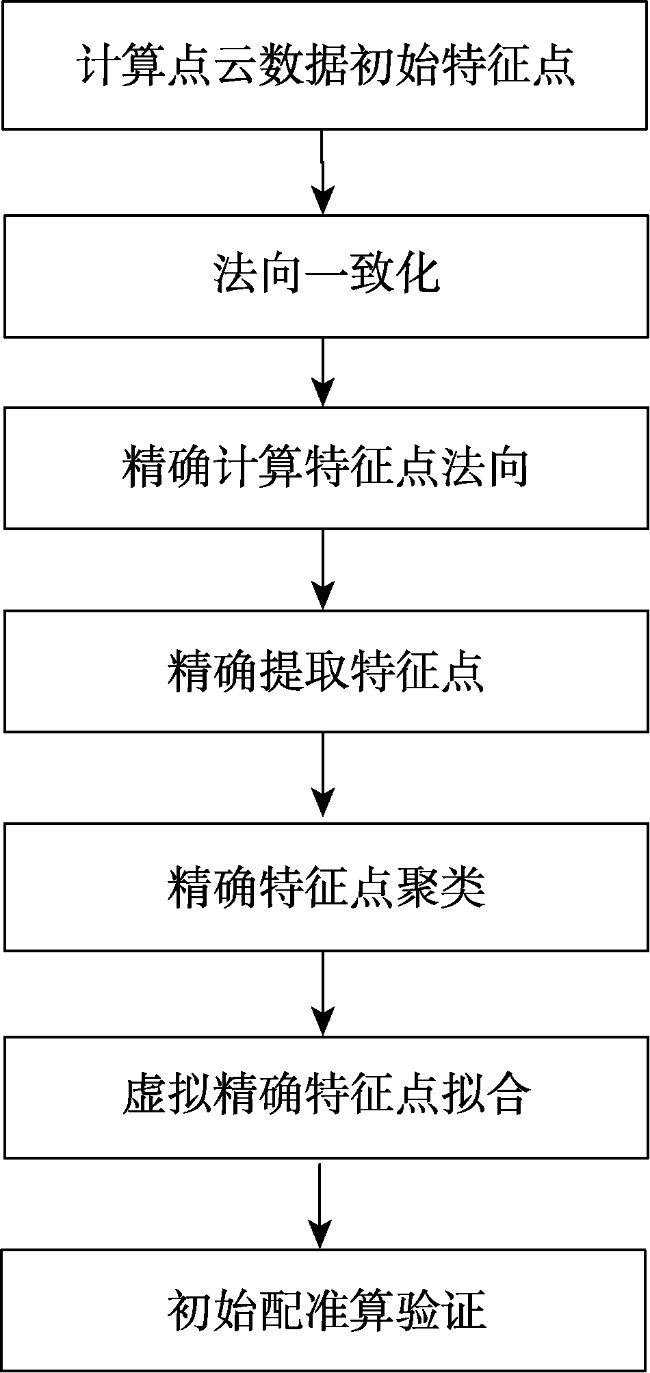
Fig. 1 Algorithm flow chart图1 算法流程图 |
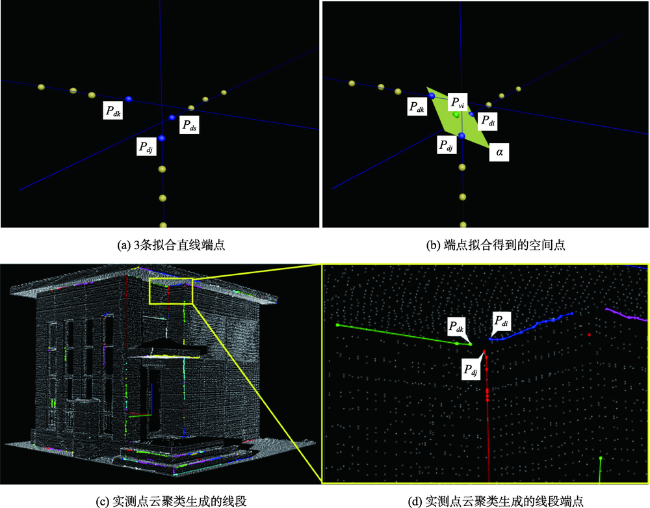
Fig. 2 Virtual feature points by endpoints matching algorithm图2 端点拟合虚拟特征点示意图 |
Fig. 3 Virtual feature points by endpoints matching algorithm图3 实测点云端点拟合虚拟特征点示意图 |
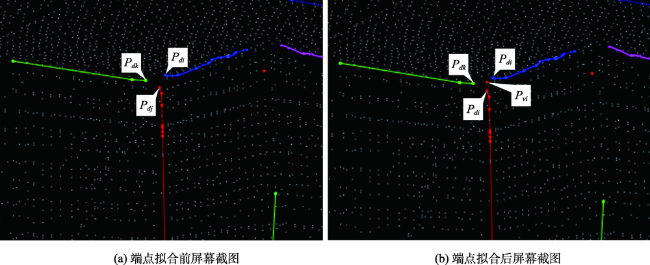
Fig. 4 Virtual feature points by straight line matching algorithm(Simulated points)图4 线段拟合虚拟特征点示意图(模拟点云图) |
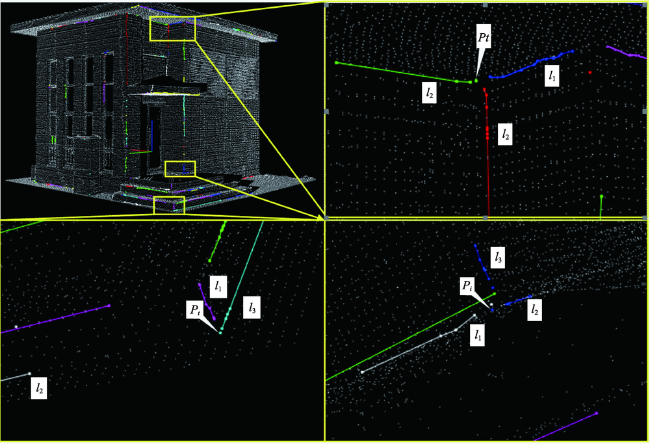
Fig. 5 Virtual feature points by straight line matching algorithm(Actual measurement points)图5 线段拟合虚拟特征点示意图(实际点云图) |
Fig. 6 Test scene图6 实验场实际影像图 |
Tab. 1 Initial registration parameters and error by conventional algorithm表1 初次提取的边角点进行初始配准参数及误差 |
| 配准参数 | 均方根误差 | |||||||
|---|---|---|---|---|---|---|---|---|
| 缩放系数k | 旋转矩阵R | 平移向量T | X/m | Y/m | Z/m | |||
| 0.97045 | 0.99967 | 0.02546 | 0.97045 | -5.43740 | 0.55077 | 1.15995 | 0.23857 | |
| -0.02546 | 0.99967 | 0.99968 | 19.08851 | |||||
| -0.00178 | 0.00065 | 0.00065 | -0.80831 | |||||
Tab. 2 Virtual feature points by endpoint fitting algorithm表2 端点拟合得到的虚拟特征点 |
| 虚拟点编号 | 8号测站端点拟合的虚拟点坐标 | 9号测站端点拟合的虚拟点坐标 | |||||
|---|---|---|---|---|---|---|---|
| Pvx | Pvy | Pvz | Pvx | Pvy | Pvz | ||
| 1 | 1.96220 | 5.04140 | -9.46110 | 7.74903 | -13.7184 | -8.94537 | |
| 2 | -1.39840 | 4.59223 | -9.46020 | 4.40403 | -14.2609 | -8.94420 | |
| 3 | -2.11530 | 4.52080 | -10.46730 | 3.67897 | -14.2120 | -9.93900 | |
| 4 | -1.26770 | 4.64480 | -10.45770 | 4.55350 | -14.2055 | -9.94297 | |
| 5 | -0.36603 | 4.76697 | -10.46770 | 5.46060 | -14.0643 | -9.94593 | |
| 6 | 2.50203 | 4.65843 | -9.43187 | 8.31707 | -14.0908 | -8.89783 | |
Tab. 3 Initial registration parameters and error by endpoints fitting algorithm表3 端点拟合特征点初始配准参数及误差 |
| 配准参数 | 均方根误差 | |||||||
|---|---|---|---|---|---|---|---|---|
| 缩放系数k | 旋转矩阵R | 平移向量T | X/m | Y/m | X/m | |||
| 0.99585 | 0.99990 | 0.01381 | 0.99999 | -5.60008 | 0.23450 | 0.21212 | 0.16693 | |
| -0.01382 | 0.99985 | 0.00977 | 18.98459 | |||||
| -0.00124 | 0.00979 | 0.99995 | -0.69463 | |||||
Tab. 4 Virtual feature points by line fitting algorithm表4 直线拟合得到的虚拟特征点 |
| 虚拟点编号 | 8号测站端点拟合的虚拟点坐标 | 9号测站端点拟合的虚拟点坐标 | |||||
|---|---|---|---|---|---|---|---|
| Pvx | Pvy | Pvz | Pvx | Pvy | Pvz | ||
| 1 | 1.92401 | 5.03767 | -9.23144 | 7.65660 | -13.6367 | -8.58715 | |
| 2 | -2.90627 | 4.30942 | -9.11996 | 2.46531 | -14.3348 | -8.57708 | |
| 3 | -1.68841 | 4.34429 | -9.51169 | 3.74963 | -13.8842 | -9.24356 | |
| 4 | -0.88299 | 4.55450 | -9.85436 | 3.96854 | -13.3019 | -8.55429 | |
| 5 | 0.156401 | 4.55181 | -9.78249 | 4.98653 | -13.4157 | -8.53616 | |
| 6 | 2.38413 | 4.38090 | -9.16290 | 7.73109 | -13.0720 | -8.59846 | |
Tab. 5 Initial registration parameters and error by straight line matching algorithm表5 直线拟合特征点初始配准参数及误差 |
| 配准参数 | 均方根误差 | |||||||
|---|---|---|---|---|---|---|---|---|
| 缩放系数k | 旋转矩阵R | 平移向量T | X/m | Y/m | Z/m | |||
| 1.00513 | 0.99975 | 0.02124 | 0.00633 | -5.45971 | 0.09822 | 0.16531 | 0.22227 | |
| -0.02113 | 0.99963 | -0.01670 | 18.74874 | |||||
| -0.00668 | 0.01656 | 0.99984 | -0.19724 | |||||
Tab. 6 Time statistics for three algorithms表6 3种特征点提取算法初始配准时间统计 |
| 边角点提取/s | 虚拟特征点拟合/s | 初始配准/s | 合计时间/s | |
|---|---|---|---|---|
| 基于曲率特征点提取算法提取 出的角点及边界点 | 10.232 | 19.3060 | 29.5380 | |
| 线段拟合虚拟特征点 | 10.232 | 6.871 | 0.0687 | 17.1717 |
| 直线拟合虚拟特征点 | 10.232 | 9.236 | 0.0653 | 19.5333 |
The authors have declared that no competing interests exist.
| [1] |
|
| [2] |
[
|
| [3] |
[
|
| [4] |
|
| [5] |
[
|
| [6] |
|
| [7] |
[
|
| [8] |
|
| [9] |
|
| [10] |
|
| [11] |
[
|
| [12] |
[
|
| [13] |
[
|
| [14] |
|
| [15] |
|
| [16] |
|
| [17] |
|
| [18] |
[
|
| [19] |
[
|
| [20] |
[
|
| [21] |
[
|
| [22] |
[
|
/
| 〈 |
|
〉 |

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}