
轻小型无人机遥感组网飞行的高程安全监测冗余 容错算法研究
作者简介:王勇军(1985-),男,山东聊城人,博士生,副教授,主要从事小型无人机组合导航技术研究。E-mail: dongwang@guat.edu.cn
收稿日期: 2018-10-15
要求修回日期: 2019-03-05
网络出版日期: 2019-04-24
基金资助
“广西特聘专家”专项经费
广西自然科学基金项目(2015GXNSFBA139251)
广西科技重大专项(桂科AA172 04086)
广西自然科学基金重点项目(2016GXNSFDA380031)
国家重点研发计划项目(2017YFB0503004-4)
Research on the Redundancy Fault-tolerant Algorithm of Altitude Safety Monitoring for Remote Sensing Networking Flight of Light and Small UAVs
Received date: 2018-10-15
Request revised date: 2019-03-05
Online published: 2019-04-24
Supported by
"Guangxi Specially-invited Experts" Special Funds
Guangxi Natural Science Foundation, No.2015GXNSFBA139251
Guangxi Science and Technology Projects, No. AA17204086
Key Projects of Guangxi Natural Science Foundation, No.2016GXNSFDA380031
National Key Research and Development Plan, No.2017YFB0503004-4
Copyright
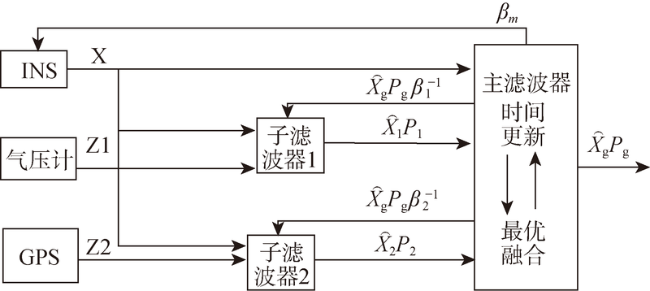
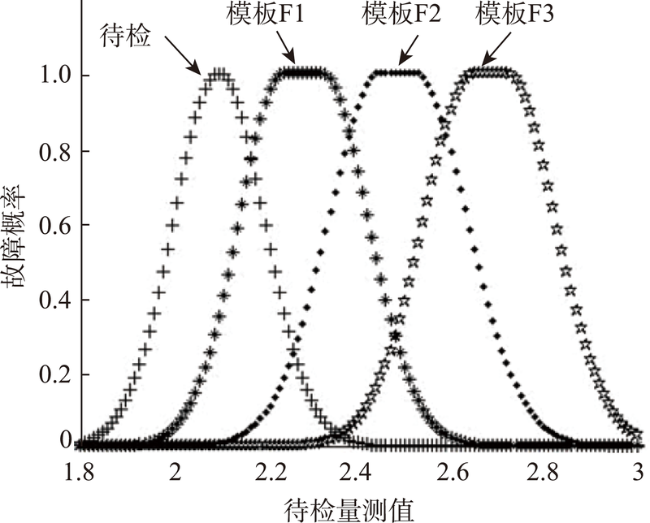
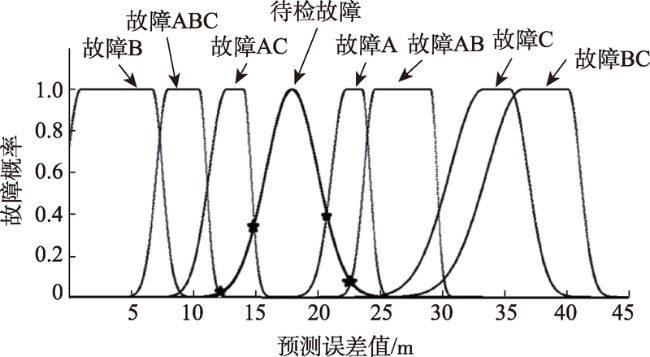
针对轻小型无人机遥感组网飞行的高程安全要求,本文设计了基于INS/GPS/气压计的多源信息冗余容错测量方案。通过分析轻小型无人机遥感组网应用时复杂多变的工作环境对可靠性与容错能力的要求,采用了联邦滤波算法进行多传感器冗余信息融合。本文分析了联邦滤波结构及算法,通过计算得出了系统容错性好以及滤波精度高的信息分配系数取值原则,并在此基础上提出一种基于故障特征信息熵的Pignistic概率转换容错信息分配方法。该算法可得到清晰准确的故障概率分布,根据此概率分布运用信息熵来确定系统故障概率,进而结合信息分配系数的取值原则得出组合测量系统各个子系统的权重比。通过算例仿真验证了不同信息分配系数主要影响子系统的估计误差和容错性能,而对联邦主滤波器的融合估计误差影响较小,说明了本文的容错信息分配方法能够为各子系统分量提供可靠的分配系数。在旋翼无人机平台上的定高悬停实验证明了该方法能将无人机高程误差减小为传统联邦滤波算法的四分之一,进一步说明了该方法能提高无人机高程安全监测系统的精度及容错性。
王勇军 , 李智 , 孙山林 , 马兴元 , 晏磊 . 轻小型无人机遥感组网飞行的高程安全监测冗余 容错算法研究[J]. 地球信息科学学报, 2019 , 21(4) : 542 -551 . DOI: 10.12082/dqxxkx.2019.180502
To satisfy the altitude safety monitoring for remote sensing networking flight of light and small Unmanned Aerial Vehicles (UAVs), a multi-source information redundancy measurement scheme based on INS/GPS/ barometer is designed in this paper. By analyzing the requirement of UAV reliability and fault tolerance in the complex and changeable working environment of remote sensing network application, the federated filtering algorithm is adopted to fuse the redundant information of multi-sensor. In this paper, the structure and algorithm of federated filtering are analyzed, and the principle of selecting information allocation coefficients with good fault-tolerance and high filtering accuracy is obtained. Then a Pignistic probabilistic transformation fault-tolerant information allocation method based on information entropy is proposed. This algorithm can obtain a clear and accurate fault probability distribution, from which the system fault probability is determined by information entropy . Then the weight ratio of each subsystem of the group measurement system is obtained by combining the value principle of information allocation coefficient. Simulation results show that different information allocation coefficients mainly affect the estimation error and fault-tolerant performance of subsystems, but which have little influence on the fusion estimation error of federated main filter. It shows that the fault-tolerant information allocation method in this paper can provide reliable allocation coefficients for each subsystem component. The fixed-altitude hovering experiment on the multi-rotor UAV platform proves that this method can be used to reduce the altitude error of UAV to one quarter of the traditional federated filtering algorithm, which further proves that this method can be used to improve the accuracy and fault-tolerance of the UAV altitude safety monitoring system.
Fig. 1 Federated filter structure for multi-source altitude information fusion systems图1 多源高程信息融合系统联邦滤波器结构 |
Fig. 2 Pending function and template library of the measuring subsystem faults图2 测量子系统故障的待检函数与模板库 |
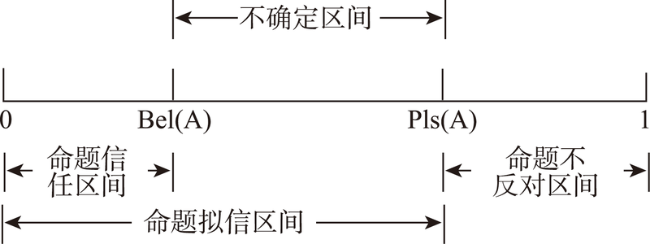
Fig. 3 Confidence intervals of class A faults in subsystems图3 子系统发生A故障的信度区间 |
Fig. 4 Fault library of altitude measurement system图4 高程测量系统故障库 |
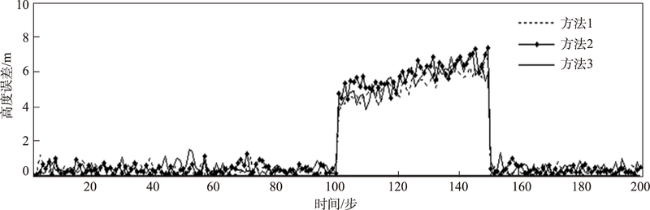
Fig. 5 Height estimation errors of main filters图5 主滤波器高度估计误差 |
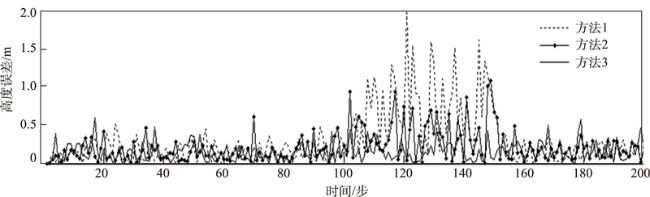
Fig. 6 Height estimation errors of sub filter 1图6 子滤波器1高度估计误差 |
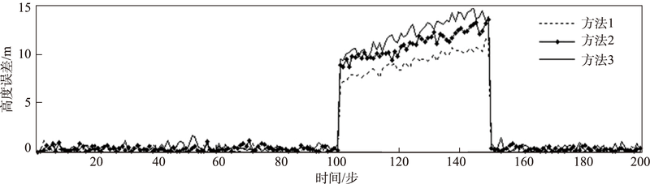
Fig. 7 Height estimation errors of sub filter 2图7 子滤波器2高度估计误差 |
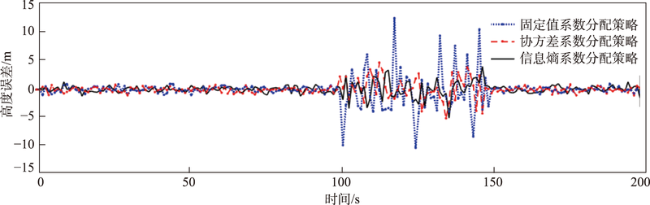
Fig. 8 Elevation error of UAV under different information allocation strategies图8 不同信息分配策略下的无人机高程误差 |
Tab. 1 UAV altitude errors under different information allocation strategies (m)表1 不同信息分配策略下的无人机高程误差 |
| 融合滤波算法 | 无故障高程 均方误差 | 故障时高程 均方误差 |
|---|---|---|
| 传统联邦滤波算法 | 0.415 | 2.096 |
| 基于误差协方差矩阵的自适应信息分配算法 | 0.368 | 0.568 |
| 基于信息熵的概率转换容错信息分配算法 | 0.357 | 0.483 |
The authors have declared that no competing interests exist.
| [1] |
[
|
| [2] |
[
|
| [3] |
[
|
| [4] |
|
| [5] |
[
|
| [6] |
|
| [7] |
|
| [8] |
|
| [9] |
[
|
| [10] |
[
|
| [11] |
[
|
| [12] |
[
|
| [13] |
[
|
| [14] |
[
|
| [15] |
|
| [16] |
|
| [17] |
[
|
| [18] |
[
|
| [19] |
[
|
| [20] |
|
| [21] |
[
|
| [22] |
|
| [23] |
[
|
| [24] |
[
|
/
| 〈 |
|
〉 |
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}