
无人机倾斜影像自动检索及影像姿态恢复
作者简介:孙钰珊(1982-),女,黑龙江哈尔滨人,博士,助理研究员,主要从事摄影测量与遥感、航空航天影像处理方面的研究。E-mail: sunys@casm.ac.cn
收稿日期: 2018-08-27
要求修回日期: 2019-01-25
网络出版日期: 2019-04-24
基金资助
国家重点研发计划项目(2017YFB0503004)
国家基础测绘科技计划课题(2017KJ0301)
中国测绘科学研究院基本科研业务项目(7771801)
Automatic Retrieval and Position Reconstruction of UAV Oblique Photogrammetry
Received date: 2018-08-27
Request revised date: 2019-01-25
Online published: 2019-04-24
Supported by
National Key Research and Development Plan, No.2017YFB0503004
National Basic Surveying and Mapping Technology Project, No.2017KJ0301
Basic Research Business Project of China Academy of Surveying and Mapping, No.7771801
Copyright
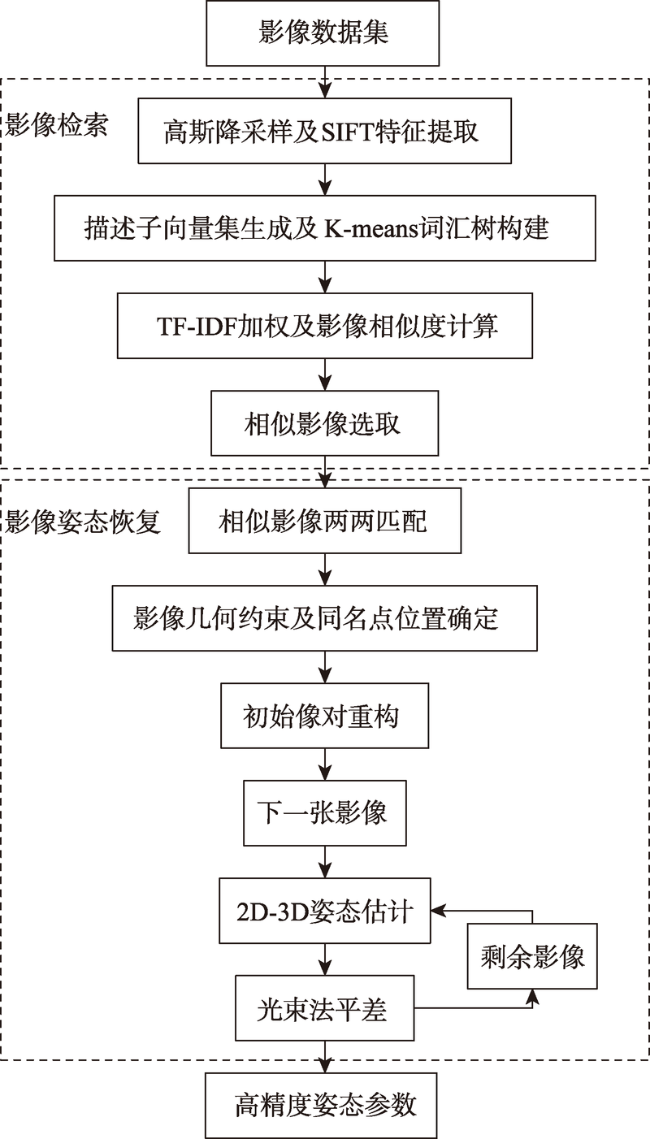
无人机倾斜摄影测量颠覆了以往正射影像只能从垂直角度拍摄的局限,在三维建模中有广泛的前景。针对有些无人机倾斜影像数据无相机标定参数、无航带信息(无序)、无POS信息的现状,本文以计算机视觉中基于内容的影像检索方法与改进的渐进式SFM方法为基础,提出一种“三无”影像自动检索、空中三角测量及影像三维重建的方法。该方法首先通过提取的特征检索出相似影像并建立网络结构,然后将影像进行两两匹配增强对应关系并进行连接点的追踪,最后利用光束法平差方法对其进行平差,获取影像集的三维点云,提高大规模影像检索、影像匹配速度的同时,提高重建的精确性和鲁棒度。本文选取三组典型试验区大数据量倾斜影像数据进行试验,立体实测控制点中误差可以达到平面0.16m/高程0.18m,试验验证了方法的稳定性、可靠性和实用性。
孙钰珊 , 艾海滨 , 许彪 , 杜全叶 . 无人机倾斜影像自动检索及影像姿态恢复[J]. 地球信息科学学报, 2019 , 21(4) : 600 -607 . DOI: 10.12082/dqxxkx.2019.180415
In recent years, unmanned aerial vehicle (UAV) have become a means of civilization and universalization. The UAV image is gradually replacing aerospace remote sensing data and is widely used in many fields. The limitation that the orthophotos can only be taken from a vertical angle in the past has been broken nowadays by oblique photogrammetry which has wide application prospect in 3D modeling. Aiming to ensure three-no-image (i.e., no camera calibration parameters, no strip information (disordered), and no POS (Position and orientation System) information) in some oblique images, the paper proposes a method of automatic aerial triangulation and 3D reconstruction for the three-no-image. This method is based on the content-based image retrieval method and improved progressive SFM (Structure from Motion) method in computer vision. Firstly, the method retrieves similar images and establishes the network through extracted features. Secondly, the correspondence between the two images is enhanced by matching the images and the tie points are tracked. Thirdly, the 3D point cloud of image is obtained by bundle adjustment. The algorithm improves the accuracy and robustness of reconstruction and makes a great progress in large scale image retrieval and image matching. Finally, , the stability, reliability, and accuracy of the proposed method was tested and validated with three-test experiments by using large scale real oblique images over three test areas. The test-1 area has 1190 images, from the project construction to the final aerial triangulation calculation without control, the total time is 4.3 hours, and the error is 0.4 pixels. The test-2 has 3685 images and no POS is used in experiment. From the project construction to the final aerial triangulation calculation without control, it takes 8 hours and the error is within 0.32 pixels. The two experimental results verified the stability and applicability of the proposed algorithm. The test-3 area has 1346 images, after 5 hours processing, the error of the free network adjustment is within 0.42 pixels, 9 ground control points are used for check points, the error is within 0.16 m in plane and 0.18 m in elevation. The experimental results verified the accuracy and reliability of the proposed algorithm.
Fig. 1 Flow chart of the algorithm of automatic retrieval and position reconstruction图1 影像自动检索及影像姿态恢复整体流程 |
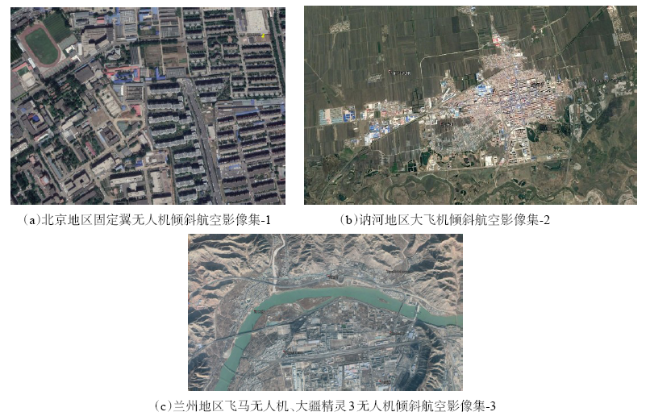
Fig. 2 Image collection of selected UAV tilted image data(Google Earth)图2 选取的无人机倾斜影像集概况(Google Earth) |
Tab. 1 Basic situation of tilted image data表1 倾斜影像数据基本情况 |
| 影像集 | 基本情况及参数 | 实验目的 |
|---|---|---|
| 数据集-1 | 北京地区固定翼无人机倾斜航空影像数据:飞行高度150 m,像元地面分辨率5 cm,测区面积 1 km2(1190张影像),无人机搭载SONY ILCE-QX1五镜头相机,下视焦距24 mm,其他4个倾 斜相机焦距为36 mm,影像像幅为5456×3632, | 稳定性与适用性验证 |
| 数据集-2 | 讷河地区大飞机倾斜航空影像数据:无人机搭载相机为Leica的RCD30五镜头倾斜相机,像 幅为9000×6732,下视焦距50 mm,其他倾斜焦距80 mm,试验区影像3685张 | 稳定性与适用性验证 |
| 数据集-3 | 兰州地区飞马无人机、大疆精灵3无人机倾斜航空影像数据:采用飞马无人机获取下视影像, 大疆精灵3通过双十字交叉飞行获取其他4个方向倾斜影像,下视影像491张,焦距为20 mm,倾斜影像共1346张,焦距为8.8 mm | 实测控制点精度与可靠性验证 |
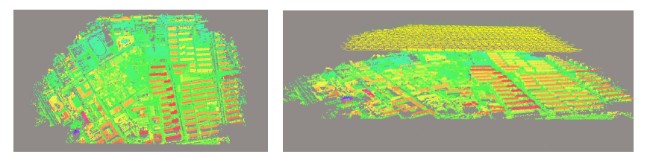
Fig. 3 Three-dimensional reconstruction renderings of Image set-1图3 影像集-1三维重建效果 |
Fig. 4 Three-dimensional reconstruction renderings of Image set-2图4 影像集-2三维重建效果 |
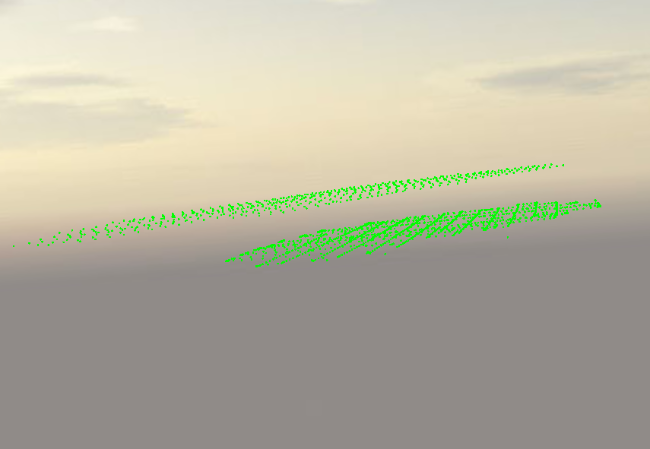
Fig. 5 Image set-3 track map图5 影像集-3飞行航迹 |
Tab. 2 Accuracy of surveyed control points of Image set-3表2 影像集-3野外实测控制点精度结果 |
| 点号 | X方向误差 | Y方向误差 | 高程误差 |
|---|---|---|---|
| N1 | 0.28 | 0.27 | -0.37 |
| N10 | -0.01 | -0.07 | 0.19 |
| N12 | -0.06 | -0.13 | 0.15 |
| N14 | 0.09 | 0.14 | -0.34 |
| N18 | -0.03 | 0.12 | -0.12 |
| N20 | -0.02 | 0.05 | 0.11 |
| N3 | -0.10 | -0.10 | 0.01 |
| N4 | -0.06 | -0.13 | 0.25 |
| N8 | -0.09 | -0.16 | 0.11 |
| 平面中误差 | 0.16 | ||
| 高程中误差 | 0.18 |
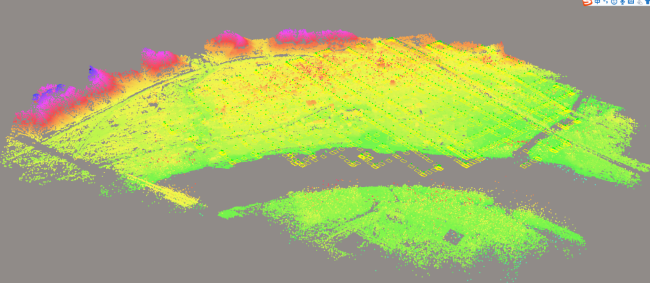
Fig. 6 Three-dimensional reconstruction renderings of Image set-3图6 影像集-3影像三维重建效果 |
The authors have declared that no competing interests exist.
| [1] |
[
|
| [2] |
[
|
| [3] |
[
|
| [4] |
[
|
| [5] |
[
|
| [6] |
|
| [7] |
|
| [8] |
|
| [9] |
|
| [10] |
|
| [11] |
|
| [12] |
|
| [13] |
[
|
| [14] |
[
|
| [15] |
|
| [16] |
[
|
| [17] |
|
| [18] |
|
| [19] |
[
|
| [20] |
[
|
| [21] |
|
| [22] |
|
/
| 〈 |
|
〉 |

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}