
基于最优极化特征组合的SAR影像湿地分类
|
赵泉华(1978— ),女,河北承德人,博士,教授,主要从事随机几何、空间统计学、模糊集理论等在遥感图像建模、解译及海洋环境遥感等研究。E-mail: zqhlby@163.com |
收稿日期: 2020-01-10
要求修回日期: 2020-04-14
网络出版日期: 2021-06-25
基金资助
辽宁省教育厅科学技术研究项目(LJ2019JL001)
版权
Wetland Classification of SAR Image based on the Polarization Characteristics Combination
Received date: 2020-01-10
Request revised date: 2020-04-14
Online published: 2021-06-25
Supported by
The Project of Science and Technology Research of Education Department of Liaoning Province(LJ2019JL001)
Copyright
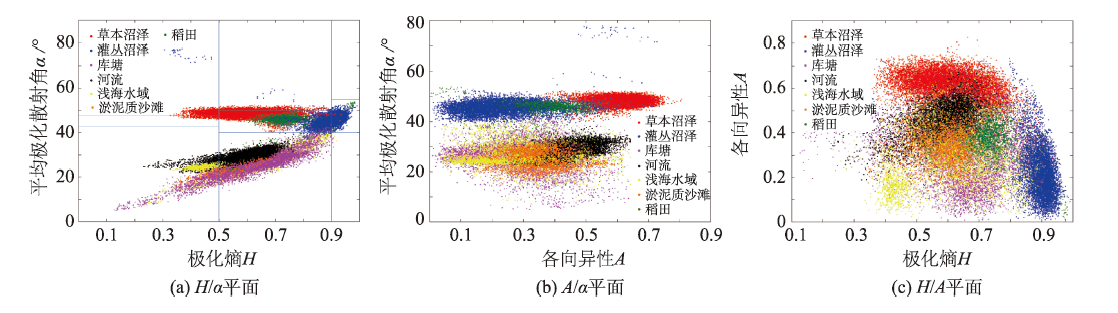
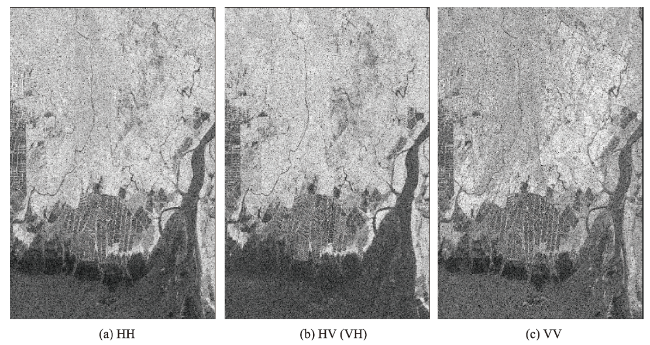
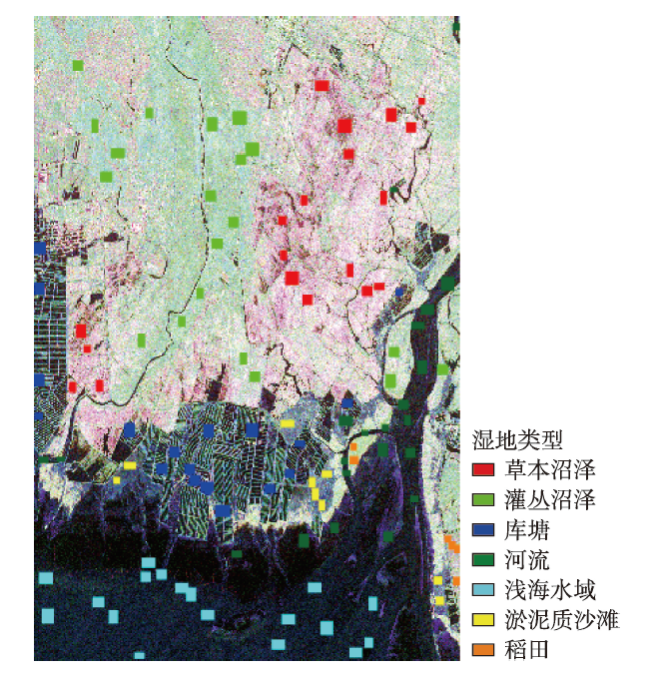
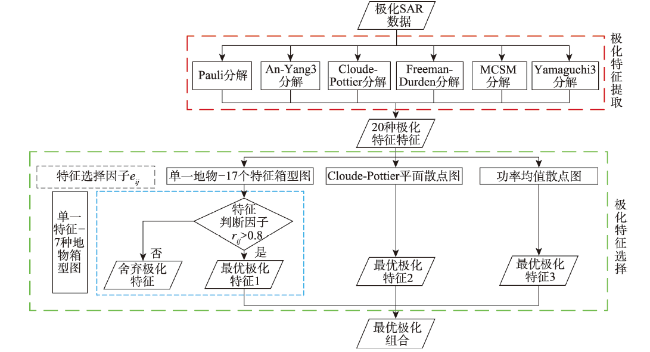
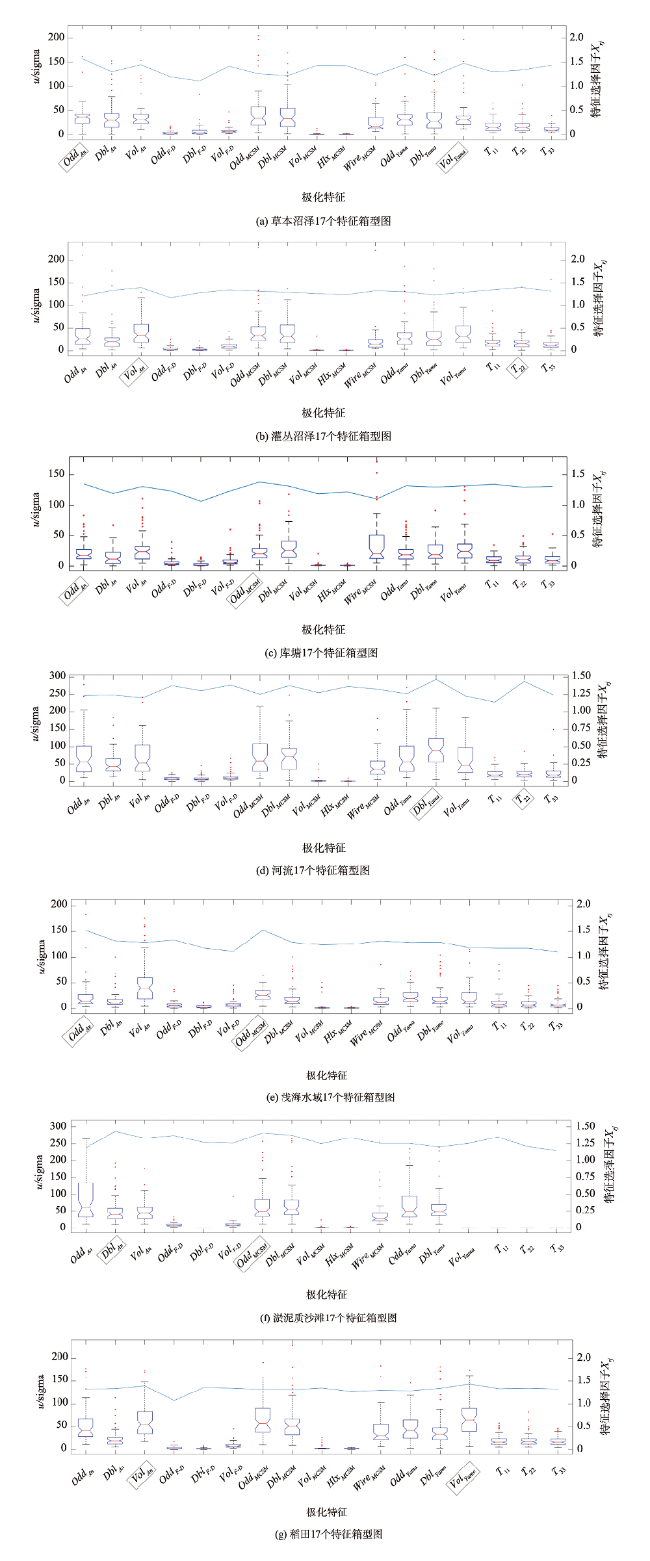
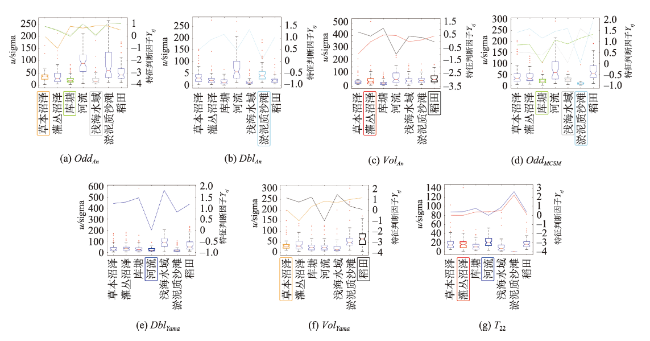
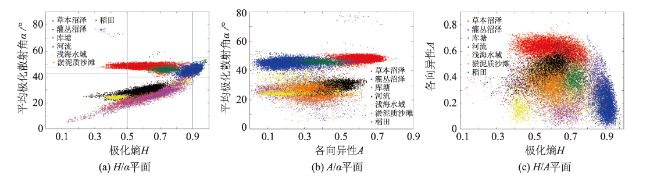
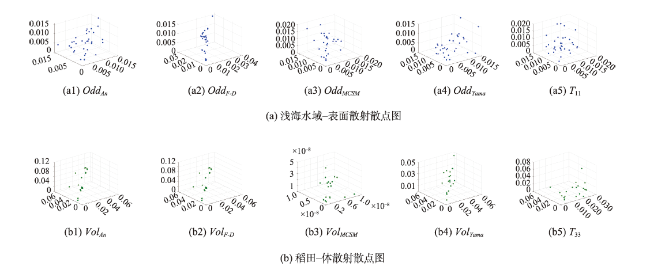
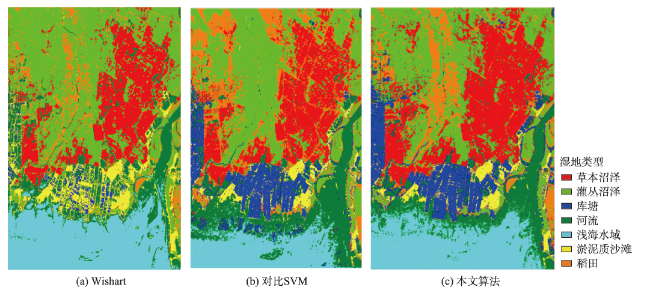
快速、准确的湿地地物分类是实现湿地精准监测的基础。为进一步研究湿地地物显著极化特征对分类结果的影响,提出了基于最优极化特征组合的SAR影像湿地分类方法。该方法利用箱型图等方式,在特征选择因子等准则下从多种极化分解方法选择最优极化特征进行组合,并在此基础上实现分类。首先,为了简化极化合成孔径雷达(Polarimetric Synthetic Aperture Radar, PolSAR)影像并降低其斑点噪声,对互易处理后的极化SAR影像进行多视化和精致Lee滤波。然后,进行6种极化分解,得到多种极化特征。再之,利用箱型图、Cloude-Pottier平面散点图和均值散点图详尽分析上述极化特征和双台河口湿地典型地物散射机制间的相关性,并据此在特征选择因子、特征判断因子、H/α平面等和均值标准差的准则下选择最优极化特征组合。最后,以上述最优极化特征组合为输入,设计支持向量机(Support Vector Machine, SVM)分类器,实现湿地的最优分类。本文以辽宁省盘锦市辽河入海口双台河口湿地为例,采用2016年7月的C波段Radarsat-2全极化数据验证最优极化特征组合的有效性。结果表明:① Cloude-Pottier分解的H、A和α、MCSM (Multiple-Component Scattering Model )分解的表面散射、Pauli分解的T33与Yamaguchi3分解的表面散射和二面角散射为最优极化特征;② 使用最优极化特征组合不仅可以减少极化特征冗余,还可以提高各湿地地物的生产者精度、分类总精度及Kappa系数,其中各湿地地物的生产者精度提高1%~5%,分类的总精度可达到94.25%,Kappa系数达到93.63%。
赵泉华 , 冯林达 , 李玉 . 基于最优极化特征组合的SAR影像湿地分类[J]. 地球信息科学学报, 2021 , 23(4) : 723 -736 . DOI: 10.12082/dqxxkx.2021.200029
Rapid and accurate classification of wetland features is the basis of accurate wetland monitoring. The key to improve the classification accuracy is to select the best polarization characteristics combination among many polarization characteristics. And in order to further study the influence of significant polarization characteristics of wetland features on classification results, a classification method based on the polarization decomposition characteristics of typical features in this area is proposed. In this method, the optimal polarization characteristics are selected and combined from a variety of polarization decomposition methods under the criteria of feature selection factors and so on by using the box plots, and then the classification is realized on this basis. Firstly, in order to simplify and reduce the speckle noises of PolSAR (Polimertice Synthetic Aperture Radar) image, the original four polarization images are processed by reciprocity, and the three polarization images after reciprocity are processed by multi-looks processing and Refined Lee filtering. Secondly, the data are decomposed into six kinds of polarization decompositions, such as Cloude-Pottierde decomposition and Paulide decomposition, and the polarization characteristics are extracted according to the decomposition results. Thirdly, the correlation between the above polarization characteristics and the scattering mechanism of typical features of Shuangtai Estuary wetland is analyzed in detail by using the box plots, Cloude-Pottier plane scatter plots and power mean scatter plots, and some polarization characteristics are selected under the criteria of feature selection factor, feature judgment factor, H/α plane, A/α plane, H/A plane, mean and standard variance. The selected polarization characteristics are combined. Finally, on the basis of the optimal polarization characteristics combination, the Support Vector Machine (SVM) classifier is designed to achieve the optimal classification of wetland features. Shuangtai Estuary, located at the estuary of Liaohe River in Panjin, Liaoning Province, is known as the "world's largest reed field". In order to verify the effectiveness of the optimal polarization characteristics combination, the C-band Radarsat-2 full polarization data in July, 2016 are utilized as experimental data. Through the qualitative and quantitative analysis of the proposed and the compared algorithm, the conclusions are as follows: the polarimetric entropy H, average alpha angle α and anisotropy A of the Cloude-Pottier decomposition, the single-bounce scattering of MCSM (Multiple-Component Scattering Model) decomposition, T33 of Pauli decomposition, the single-bounce and the double-bounce scattering of Yamaguchi3 decomposition are the optimal polarization characteristics on the one hand, and on the other hand, the optimal polarization characteristics combination can not only reduce the data redundancy and the calculation, and improve the classification efficiency, but also accurately represent the features and improve the producer's accuracy of each wetland category, the overall accuracy and kappa coefficient. Among them, the producer's accuracy of the wetland features has increased by 1% to 5%, the overall accuracyand kappa coefficient can reach 94.25% and 93.63% respectively.
表1 各极化分解对应的特征参数Tab. 1 The corresponding characteristic parameters under each polarization decomposition |
| 特征参数 | 公式 | 含义 | 编号 |
|---|---|---|---|
| OddAn | OddAn= k1(T11, T22, T33, T12, T13, T23) | OddAn为An_Yang3分解中表面散射功率; k1表明表面散射可由相干矩阵T表示;T11—T23为相干矩阵T中元素 | (1) |
| DblAn | DblAn = k2(T11, T22, T33, T12, T13, T23) | DblAn为An_Yang3分解中二面角散射功率; k2表明二面角散射可由相干矩阵T表示 | (2) |
| VolAn | VolAn = k3(T11, T22, T33, T12, T13, T23) | VolAn为An_Yang3分解中体散射功率; k3表明体散射可由相干矩阵T表示 | (3) |
| OddF-D | PsF-D为Freeman-Durden分解中表面散射功率; fsF-D为表面散射的权重,β为参数 | (4) | |
| DblF-D | PdF-D为Freeman-Durden分解中二面角散射功率; fdF-D为二面角散射的权重,α为参数 | (5) | |
| VolF-D | PvF-D为Freeman-Durden分解中体散射功率; fvF-D为体散射的权重 | (6) | |
| OddMCSM | PsMCSM为MCSM分解中表面散射功率; fsMCSM为表面散射的权重,ρ为参数 | (7) | |
| DblMCSM | PdMCSM为MCSM分解中二面角散射功率; fdYMCSM为二面角散射的权重,σ为参数 | (8) | |
| VolMCSM | PvMCSM为MCSM分解中体散射功率; fvMCSM为体散射的权重 | (9) | |
| HlxMCSM | PHlxMCSM为MCSM分解中螺旋体散射功率; fHlxYMCSM为螺旋体散射的权重 | (10) | |
| WireMCSM | PWireMCSM为MCSM分解中线散射功率; fWireMCSM为线散射的权重,γ和为参数 | (11) | |
| OddYama | PsYama为Yamaguchi3分解中表面散射功率; fsYama为表面散射的权重,τ为参数 | (12) | |
| DblYama | PdYama为Yamaguchi3分解中二面角散射功率; fdYama为二面角散射的权重,ζ为参数 | (13) | |
| VolYama | PvYama为Yamaguchi3分解中体散射功率; fvYama为体散射的权重 | (14) | |
| T11 | T11∈ diag(T) | T11为Pauli分解中包含的表面散射信息; diag(T)表明相干矩阵T中对角线元素 | (15) |
| T22 | T22∈ diag(T) | T22为Pauli分解中包含的二面角散射信息 | (16) |
| T33 | T33∈ diag(T) | T33为Pauli分解中包含的体散射信息 | (17) |
| α | α为Cloude-Pottier分解中平均极化散射角,识别主要散射机理; αm为散射角; Pm为相干矩阵T特征值的伪概率,m = 1, 2, 3 | (18) | |
| H | H为Cloude-Pottier分解中极化熵,衡量极化程度 | (19) | |
| A | A为Cloude-Pottier分解中各向异性,衡量非主导散射相对大小; λi为从大到小排列的特征值 | (20) |
表2 7类地物的特征箱型图对应表Tab. 2 Corresponding table of characteristics box plots of 7 kinds of wetland features |
| 地物类型 | 特征参数 |
|---|---|
| 草本沼泽 | OddAn、VolYama |
| 灌丛沼泽 | VolAn、T22 |
| 库塘 | OddAn、OddMCSM |
| 河流 | DblYama、T22 |
| 浅海水域 | OddAn、OddMCSM |
| 淤泥质沙滩 | DblAn、OddMCSM |
| 稻田 | VolAn、VolYama |
表3 H/α空间散射机理与实际地物对照Tab. 3 Comparison between H/α spatial scattering mechanism and actual ground objects |
| 0≤H<0.5 | 0.5≤H<0.9 | 0.9≤H<1 | ||||||
|---|---|---|---|---|---|---|---|---|
| 散射类型 | 地物 | 散射类型 | 地物 | 散射类型 | 地物 | |||
| 0°≤α<40° | 低熵表面散射 | 库塘 河流 浅海水域 淤泥质沙滩 | 中熵表面散射 | 库塘 河流 浅海水域 淤泥质沙滩 | 高熵表面散射 | 现实不存在 | ||
| 40°≤α<42.5° | 中熵植被散射 | 草本沼泽 灌丛沼泽 稻田 | 高熵植被散射 | 灌丛沼泽 | ||||
| 42.5°≤α<47.5° | 低熵偶极子散射 | 草本沼泽 | ||||||
| 47.5°≤α<50° | 低熵多重散射 | 草本沼泽 | 高熵多重散射 | 现实不存在 | ||||
| 50°≤α<90° | 中熵多重散射 | 草本沼泽 | ||||||
表4 最优极化特征组合与湿地地物对应Tab. 4 Optimal polarization characteristic combination and wetland features |
| 特征参数 | 区分地物 |
|---|---|
| OddMCSM | 库塘、淤泥质沙滩 |
| OddYama | 浅海水域 |
| DblYama | 河流 |
| T33 | 稻田 |
| α | 与H构成平面可区分灌丛沼泽;与A构成平面可区分草本沼泽和灌丛沼泽 |
| H | 与A构成平面可区分灌丛沼泽 |
| A | 同H或α构成平面区分地物 |
表5 本文算法及对比算法的精度对比Tab. 5 The accuracy comparison between the algorithm and two comparison algorithms (%) |
| 地物类型 | Wishart | SVM | 本文算法 |
|---|---|---|---|
| 草本沼泽 | 94.78 | 92.37 | 95.63 |
| 灌丛沼泽 | 88.46 | 91.93 | 96.23 |
| 库塘 | 36.68 | 95.83 | 96.15 |
| 河流 | 62.78 | 92.35 | 93.67 |
| 浅海水域 | 91.11 | 97.52 | 99.99 |
| 淤泥质沙滩 | 97.96 | 71.95 | 74.63 |
| 稻田 | 75.25 | 67.31 | 72.35 |
| OA | 78.37 | 90.44 | 94.25 |
| Kappa | 74.00 | 89.82 | 93.63 |
| [1] |
于昊天, 黄时豪, 刘亚军, 等. 鄱阳湖湿地土壤酶及微生物生物量的剖面分布特征[J]. 环境科学研究, 2017,30(11):1715-1722.
[
|
| [2] |
吴海明, 袁佐栋, 张建, 等. 规模化人工湿地的温室气体释放通量[J]. 环境科学研究, 2016,29(8):1195-1199.
[
|
| [3] |
赵泉华, 胡广臣, 李晓丽, 等. 基于全极化SAR影像的双台河口湿地分类及其变化分析[J]. 环境科学研究, 2019,32(2):309-316.
[
|
| [4] |
陈炯, 贾海峰, 杨健, 等. 基于极化SAR的河流有机物污染监测研究[J]. 环境科学, 2010,31(9):2017-2022.
[
|
| [5] |
宋伟东, 杨冬, 李恩宝, 等. 盘锦市湿地信息提取与动态变化监测[J]. 测绘科学, 2016,41(9):60-65,79.
[
|
| [6] |
徐遥辰, 刘贲, 卢奂, 等. 基于CORONA KH-4B影像的湿地景观格局重建——以杭州西溪湿地为例[J]. 浙江大学学报(工学版), 2018,52(11):2233-2242.
[
|
| [7] |
李健锋, 叶虎平, 张宗科, 等. 基于Landsat影像的斯里兰卡内陆湖库水体时空变化分析[J]. 地球信息科学学报, 2019,21(5):781-788.
[
|
| [8] |
|
| [9] |
|
| [10] |
张树文, 颜凤芹, 于灵雪, 等. 湿地遥感研究进展[J]. 地理科学, 2013,33(11):1406-1412.
[
|
| [11] |
王霄鹏, 张杰, 马毅, 等. 不同极化方式SAR与TM融合影像滨海湿地分类精度比较[J]. 海洋学研究, 2014,32(1):40-46.
[
|
| [12] |
廖静娟, 王庆. 利用Radarsat-2极化雷达数据探测湿地地表特征与分类[J]. 国土资源遥感, 2009,21(3):70-73.
[
|
| [13] |
|
| [14] |
数据来源于美国地质调查局[EB/OL].(https://earthexplorer.usgs.gov/).
[ The data set is provided by the United States geological survey[EB/OL].(https://earthexplorer.usgs.gov/). ]
|
| [15] |
|
| [16] |
|
| [17] |
|
| [18] |
|
| [19] |
|
| [20] |
|
| [21] |
|
| [22] |
|
| [23] |
|
| [24] |
|
| [25] |
|
| [26] |
|
| [27] |
|
| [28] |
李远远, 梅红波, 任晓杰, 等. 基于确定性系数和支持向量机的地质灾害易发性评价[J]. 地球信息科学学报, 2018,20(12):1699-1709.
[
|
| [29] |
|
/
| 〈 |
|
〉 |

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}