
基于地形数据的长距离越野路径快速规划方法研究
|
冯世盛(1996— ),男,山西晋中人,硕士生,主要从事越野路径规划研究。E-mail: fshisheng@163.com |
收稿日期: 2022-05-20
修回日期: 2022-06-23
网络出版日期: 2022-11-25
Fast Method for Long-Distance Off-Road Path Planning based on Terrain Data
Received date: 2022-05-20
Revised date: 2022-06-23
Online published: 2022-11-25
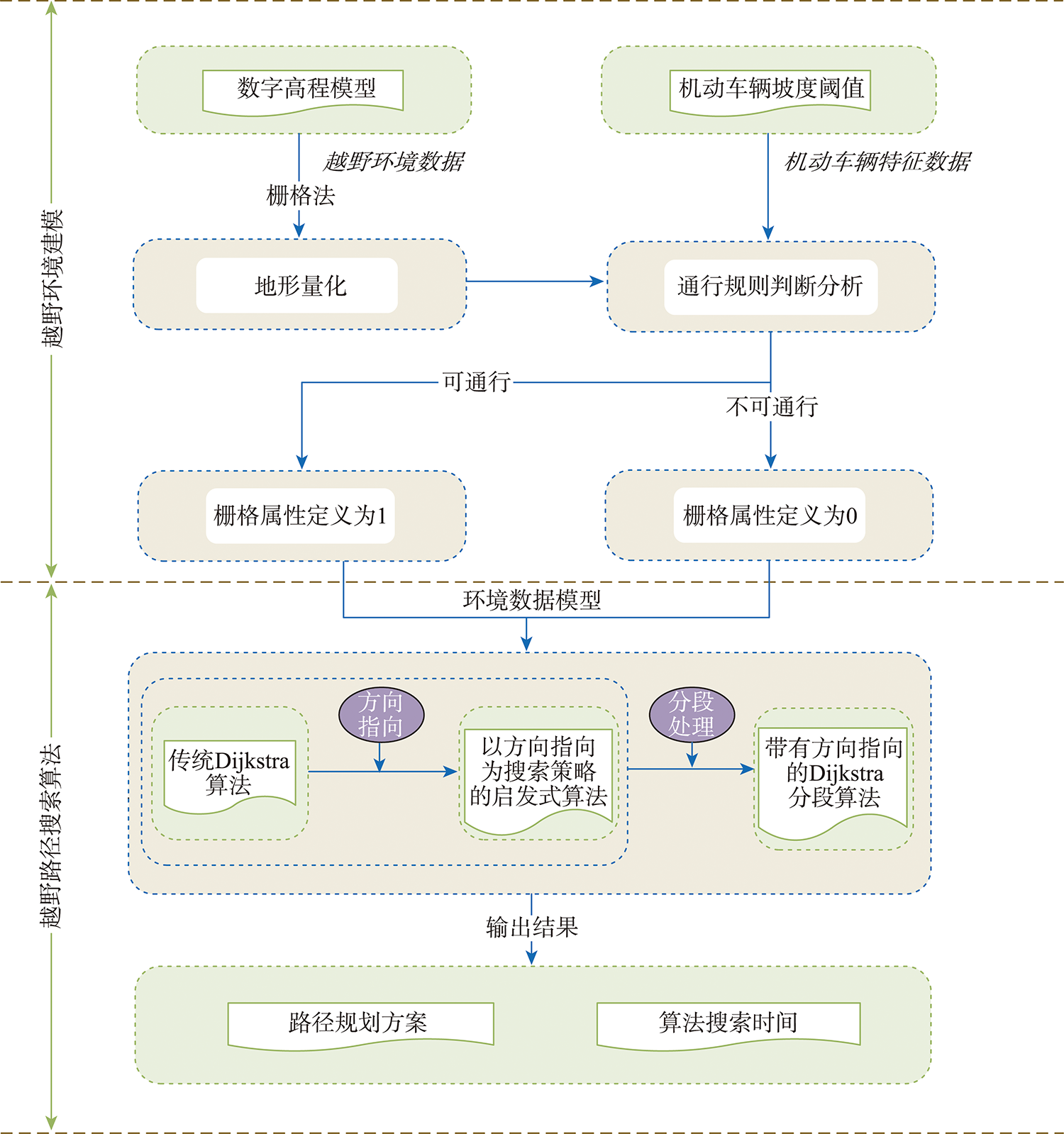
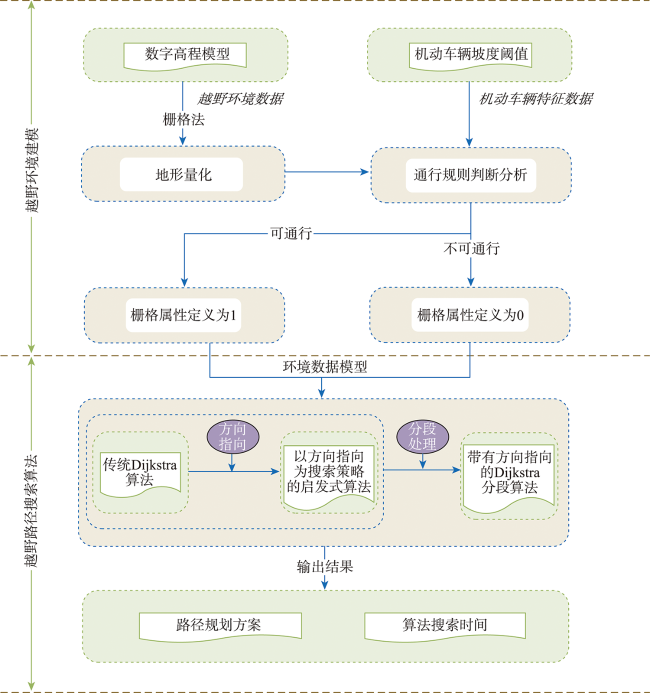
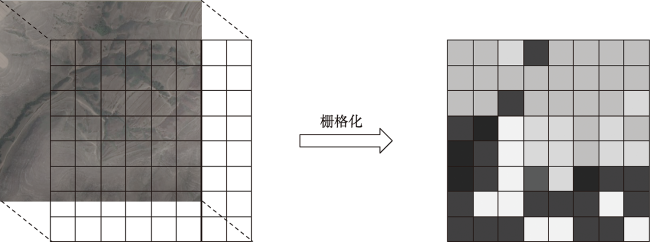
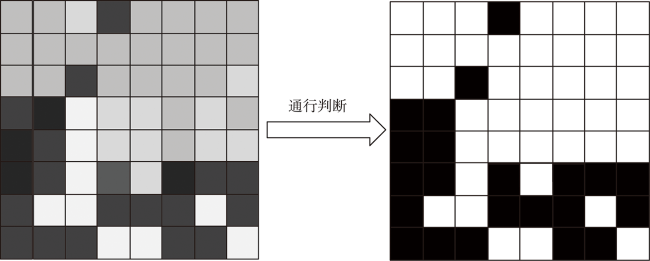
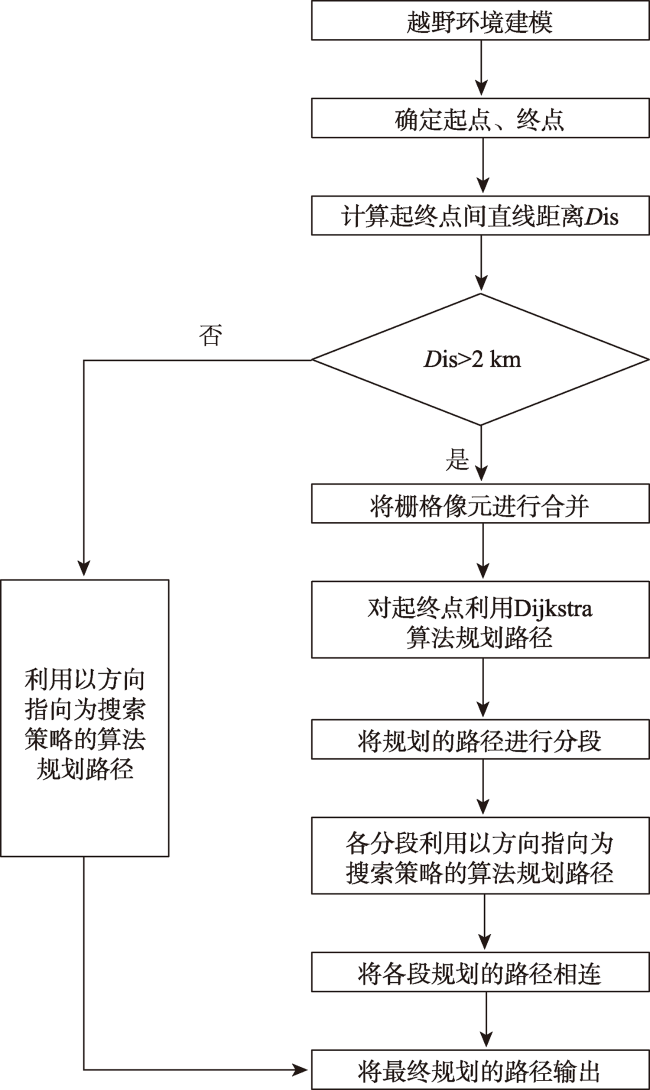
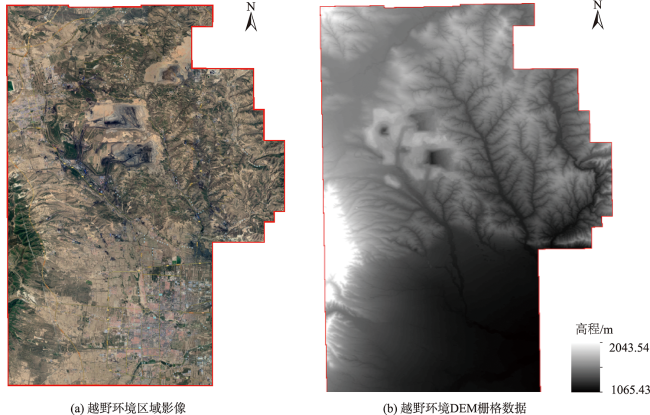
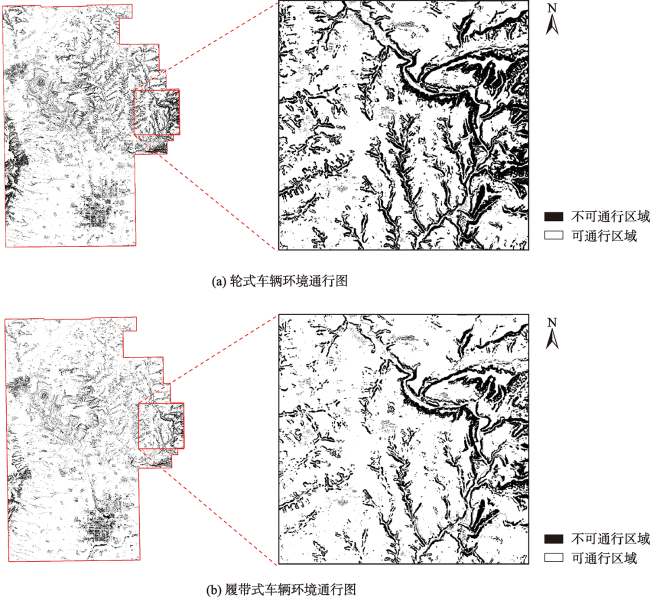
越野环境下机动车辆的快速路径规划在野外搜救、应急抢险及军事作战等领域均具有重要意义,在以上场景中,随着空间维数的增加,传统路径搜索算法计算复杂性急剧增长,可能无法在既定时间内求解可靠路径。为解决上述不足,本文结合越野路径规划不受路网通行限制以及两点之间直线最短的特点,提出以方向指向作为搜索策略的启发式算法,该算法搜索效率大幅提升,却难以保证求解质量。为进一步提高求解质量,提出了带有方向指向的Dijkstra分段算法,该算法在较低精度环境模型下通过Dijkstra算法找到最优路径,并将该路径进行分段,各分段以方向指向作为搜索策略进行路径搜索,从而在长距离越野路径规划中快速规划通行方案。为验证该算法的有效性,本文利用山西省某市的数字高程模型数据进行实验,引入了窗口移动法对地形进行先期的坡度计算和通行性分析,构建越野环境模型,调用路径搜索算法进行规划。实验结果表明,本文所提算法相比Dijkstra算法计算效率得到了大幅提升,且规划路径的长度接近于最优解。
冯世盛 , 徐青 , 朱新铭 , 邹霓霄 , 李帅 . 基于地形数据的长距离越野路径快速规划方法研究[J]. 地球信息科学学报, 2022 , 24(9) : 1742 -1754 . DOI: 10.12082/dqxxkx.2022.220329
The fast path planning of motor vehicles in the off-road environment is of great significance in the fields of field search and rescue, emergency rescue, and military operations. In the above scenarios, with the increase of spatial dimension, the computational complexity of traditional path search algorithms increases exponentially, and may not be able to be calculated within a given time. To solve the above deficiencies, this paper proposes a heuristic algorithm with directional pointing as a search strategy, combining the characteristics of off-road path planning that is not restricted by road network traffic and the shortest straight line between two points. In order to further improve the solution quality, a Dijkstra segmentation algorithm with directional pointing is proposed. This algorithm finds the optimal path through Dijkstra algorithm in a low-precision environment model and divides the path into segments. Each segment is oriented in a direction. Route search is performed as a search strategy to quickly plan passage schemes in long-distance off-road route planning. In order to verify the effectiveness of the algorithm, this paper uses the digital elevation model data of a city in Shanxi Province to conduct experiments and introduces the window movement method to perform preliminary slope calculation and trafficability analysis of the terrain, build an off-road environment model, and call the path search algorithm to carry out path planning. The experimental results show that the computational efficiency of the algorithm proposed in this paper has been greatly improved compared to the Dijkstra algorithm, and the length of the planned path is close to the optimal solution.
| 算法1 Dijkstra算法流程 |
|---|
| 输入:环境数字模型、起点 、目标点 1.初始化像元,设立数组 、数组 2.将起点 放入数组 ,将 初始化为0 3. for If 与数组 中节点相邻 将节点 其距起点s最短距离赋值于 Else 为无穷大 4.将步骤3中 值最小的点从数组 中取出 5.将所取出的点放入数组 6.循环步骤3-5,直至目标点 放入数组 7.Return 起点 到目标点 的最短路径 |
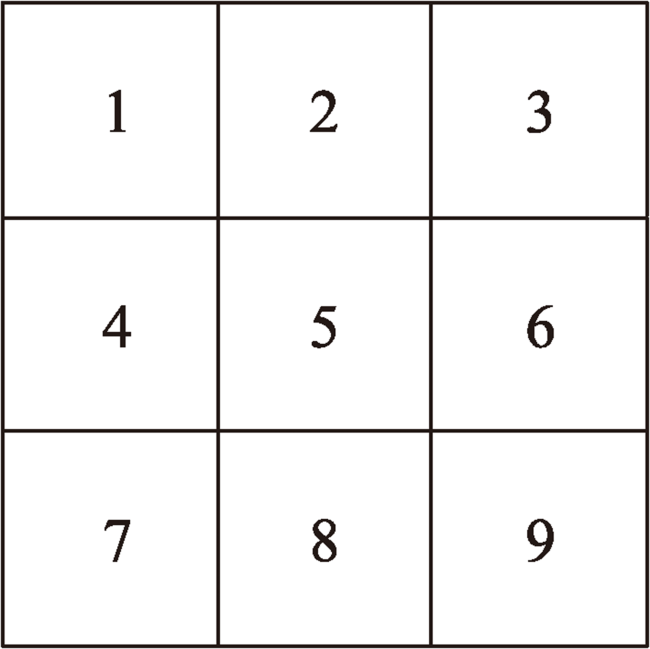
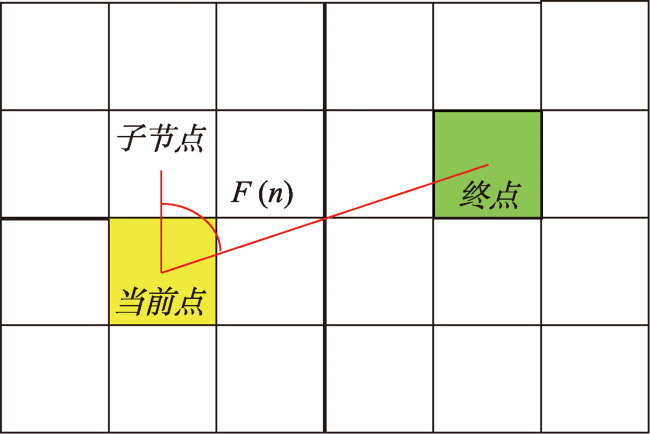
图6 当前点、子点、目标点夹角示意Fig. 6 Schematic diagram of the angle between the current point, the sub point and the target point |
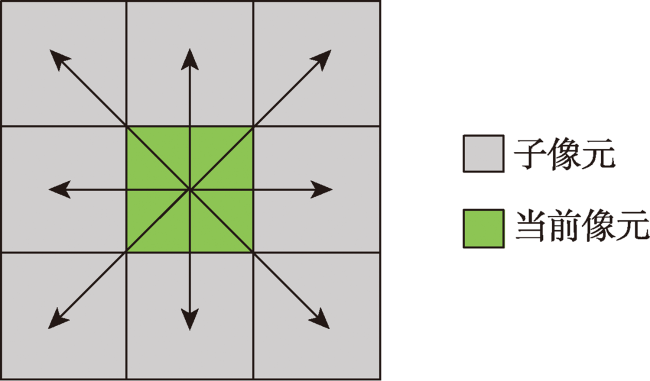
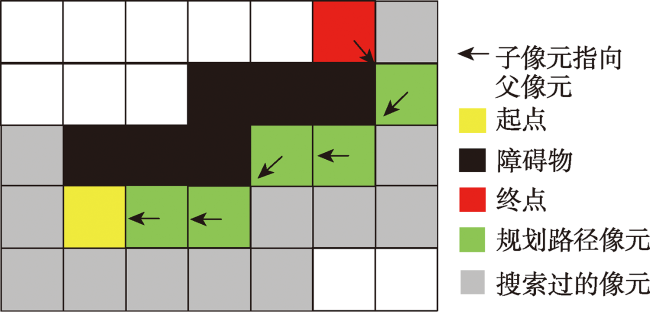
图8 以方向指向作为搜索策略的启发式算法搜索简化模型Fig. 8 Heuristic algorithm search simplified model with direction pointing as search strategy |
| 算法2 以方向指向作为搜索策略的启发式算法流程 |
|---|
| 输入:环境数字模型、起点、目标点 1.初始化像元 2. If初始化标记为0,表示格元未被计算过 3. Else标记为1,表示为路径上的点或不可通行 4.创建容器m_openList,用于容纳路径节点 5.将起点加入m_openList中,作为当前节点 6.While(当前节点不是目标点) 7. 查看当前节点邻接可通行子节点的情况 8. If(有子节点已存在m_openList中) 9. 路径存在交叉,去掉该交叉部分 10. Else If(子节点存在可通行) 11. 计算邻接可通行子点的 值,计算见式(5) 12. 选择 值最小的邻接可通行子点 13. 添加到m_openList中,并将其作为路径的当前点 14. Else 15. 回退回上一级节点,并在剩余子节点中选最小 值, 16. 若回退到起始点则说明没找到路径 17. Return 寻路失败 18.Return m_openList 19.遍历路径上节点,获取路径信息 输出:由起点至目标点的路径 |
| 算法3 栅格单元合并算法 |
|---|
| 1. 指栅格合并单元当前大小,初始为1 2. 3. 指有同一个顶点的4个栅格像元组合,且每个栅格像元仅属于一个Vi 4. 所含4个栅格像元中3个或3个以上可通行 5. 将 4个栅格像元合并且定义为可通行 6. 将 4个栅格像元合并且定义为不可通行 7. 8. 栅格合并完成 |
| 算法4 分段判断规则伪代码 |
|---|
| 1. // 计算见式(5) 2. 3. // 为分段数 4. 5. |
表1 路径规划实验的详细信息Tab. 1 Details of the path planning experiment |
| 实验编号 | 类别 | 起点经纬度 | 目标点经纬度 | 起终点直线距离/km | 地形特点 |
|---|---|---|---|---|---|
| 1 | 短距离 | (112.268 °E,39.373 °N) | (112.287 °E,39.359 °N) | 2.32 | 山区地段 |
| 2 | 较短距离 | (112.303 °E,39.341 °N) | (112.334 °E,39.324 °N) | 3.33 | 平坦地段 |
| 3 | 中距离 | (112.272 °E,39.369 °N) | (112.314 °E,39.349 °N) | 4.26 | 山区地段 |
| 4 | 较长距离 | (112.266 °E,39.375 °N) | (112.351 °E,39.361 °N) | 7.67 | 山区、平地交错 |
| 5 | 长距离 | (112.350 °E,39.388 °N) | (112.349 °E,39.284 °N) | 11.52 | 平坦地段 |
| 6 | 长距离 | (112.276 °E,39.488 °N) | (112.361 °E,39.298 °N) | 22.33 | 山区、平地交错 |
表2 实验3中3种算法规划结果Tab. 2 Planning results of three algorithms in experiment 3 |
| 算法 | 效果图 |
|---|---|
| Dijkstra算法 | 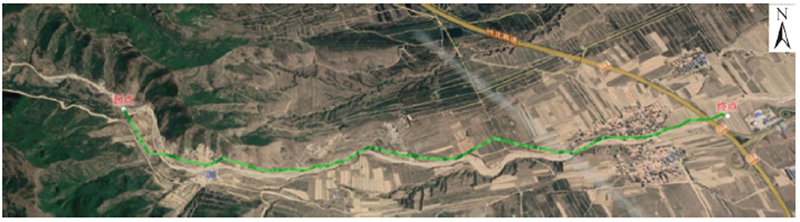 |
| 以方向指向作为搜索策略的启发式算法 |  |
| 带有方向指向的Dijkstra分段算法 |  |
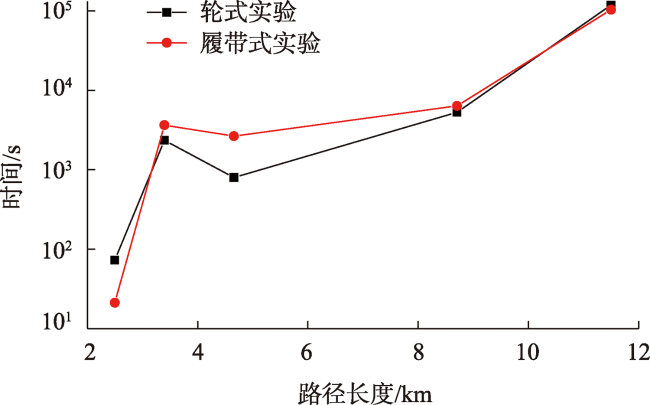
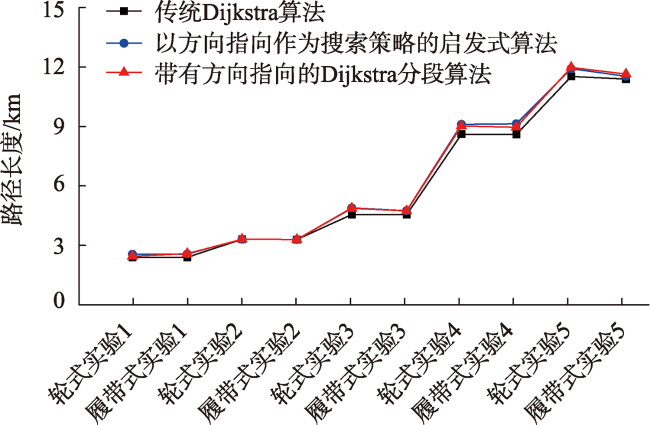
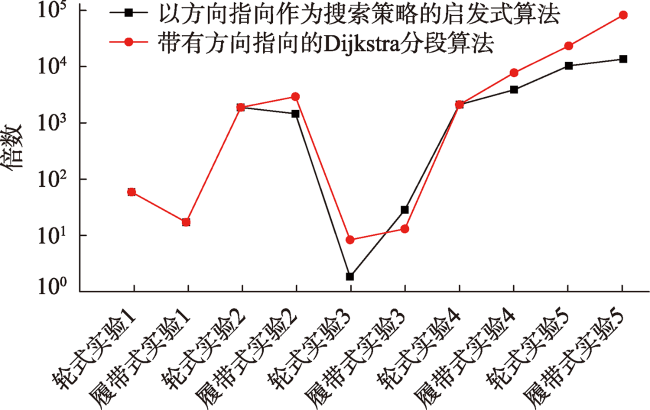
表3 3种算法在不同实验下的路径长度、搜索时间Tab. 3 Path length and search time of three algorithms under different experiments |
| 实验编号 | 车辆类型 | Dijkstra算法 | 以方向指向作为搜索策略的启发式算法 | 带有方向指向的Dijkstra分段算法 | |||
|---|---|---|---|---|---|---|---|
| 路径长度/km | 搜索时间/ s | 路径长度/km | 搜索时间/ s | 路径长度/km | 搜索时间/ s | ||
| 1 | 轮式 | 2.63 | 82 | 2.78 | 1 | 2.68 | 1 |
| 履带式 | 2.63 | 24 | 2.79 | 1 | 2.81 | 1 | |
| 2 | 轮式 | 3.53 | 2569 | 3.53 | 1 | 3.53 | 1 |
| 履带式 | 3.52 | 3971 | 3.52 | 2 | 3.52 | 1 | |
| 3 | 轮式 | 4.77 | 881 | 5.10 | 342 | 5.08 | 75 |
| 履带式 | 4.77 | 2892 | 4.96 | 73 | 4.95 | 158 | |
| 4 | 轮式 | 8.79 | 5740 | 9.28 | 2 | 9.20 | 2 |
| 履带式 | 8.78 | 6911 | 9.31 | 2 | 9.14 | 1 | |
| 5 | 轮式 | 11.68 | 125 622 | 12.07 | 9 | 12.13 | 4 |
| 履带式 | 11.55 | 109 842 | 11.69 | 6 | 11.80 | 1 | |
| 6 | 轮式 | — | >108 000 | 28.75 | 16 | 26.36 | 2 |
| 履带式 | — | >108 000 | 28.02 | 11 | 26.14 | 3 | |
| [1] |
刘爽. 基于地理信息系统的战术活动路径规划算法研究[D]. 哈尔滨: 哈尔滨工程大学, 2007.
[
|
| [2] |
赵德群, 段建英, 陈鹏宇, 等. 基于A*算法的三维地图最优路径规划[J]. 计算机系统应用, 2017, 26(7):146-152.
[
|
| [3] |
晏福兴, 唐雪峰, 国林, 等. 鸭绿江老岭区域地质环境背景及重大灾害应急救援物资运输通行性分析[J]. 安全与环境工程, 2021, 28(5):131-136.
[
|
| [4] |
张德, 黄利民, 王强. 复杂环境下机动路线规划研究[J]. 测绘科学与工程, 2020, 40(3):38-44.
[
|
| [5] |
王登科. 部队机动的多需求路径规划[D]. 西安: 西安电子科技大学, 2020.
[
|
| [6] |
|
| [7] |
|
| [8] |
|
| [9] |
吴天羿, 许继恒, 刘建永, 等. 多策略蚁群算法求解越野路径规划[J]. 解放军理工大学学报(自然科学版), 2014, 15(2):158-164.
[
|
| [10] |
|
| [11] |
田喜平, 苏志军, 李想, 等. 越野机动路线选择算法的改进[J]. 测绘与空间地理信息, 2013, 36(3):199-201,204.
[
|
| [12] |
|
| [13] |
林笃斌, 李欣. 基于DEM格网的改进型A*路径搜索算法[J]. 计算机工程与设计, 2011, 32(10):3414-3418.
[
|
| [14] |
吴天羿, 许继恒, 刘建永, 等. 基于改进A*算法的越野路径规划研究[J]. 计算机应用研究, 2013, 30(6):1724-1726.
[
|
| [15] |
|
| [16] |
|
| [17] |
|
| [18] |
黄鲁峰. 基于GIS的战场自然环境因子综合分析研究[D]. 郑州: 解放军信息工程大学, 2008.
[
|
| [19] |
袁仁进, 陈刚, 王冰冰. 地形坡度对越野机动时间影响分析[J]. 地理信息世界. 2017, 24(6):87-91.
[
|
| [20] |
范林林. 基于六角格网的越野路径规划技术方法研究[D]. 郑州: 解放军信息工程大学, 2017.
[
|
| [21] |
|
/
| 〈 |
|
〉 |

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}