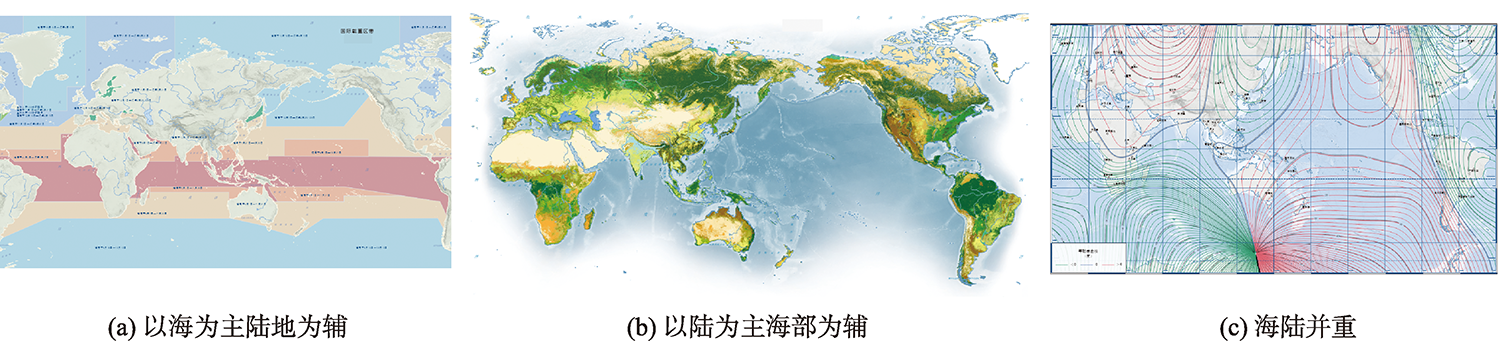
设计和编制海陆统筹的综合航海地图集服务于国家“构建海洋命运共同体”发展目标,同时也是促进海陆文化共融和海陆睦邻合作的重要推力,在当前地图学领域受到普遍关注。本文通过与航海专题图、陆地专题图的对比分析,从地图选题、比例尺、投影、地理分幅等方面探讨了海陆统筹地图集的表达特点,并从海陆并蓄视角出发,提出综合航海地图集基础地理框架的内容体系和构建策略。在此基础上,结合《世界航海地图集》的编制实践设计了其基础地理框架的具体建立方案:① 中小比例尺地图使用WGS84坐标系,较大比例尺地图使用CGCS2000坐标系;② 根据专题内容、制图区域、变形需要,制图单元可以使用等差分纬线多圆锥、墨卡托、古德等多种投影;③ 地理底图分为世界地图、典型区域地图、陆地地图、海域地图、航区地图、港口地
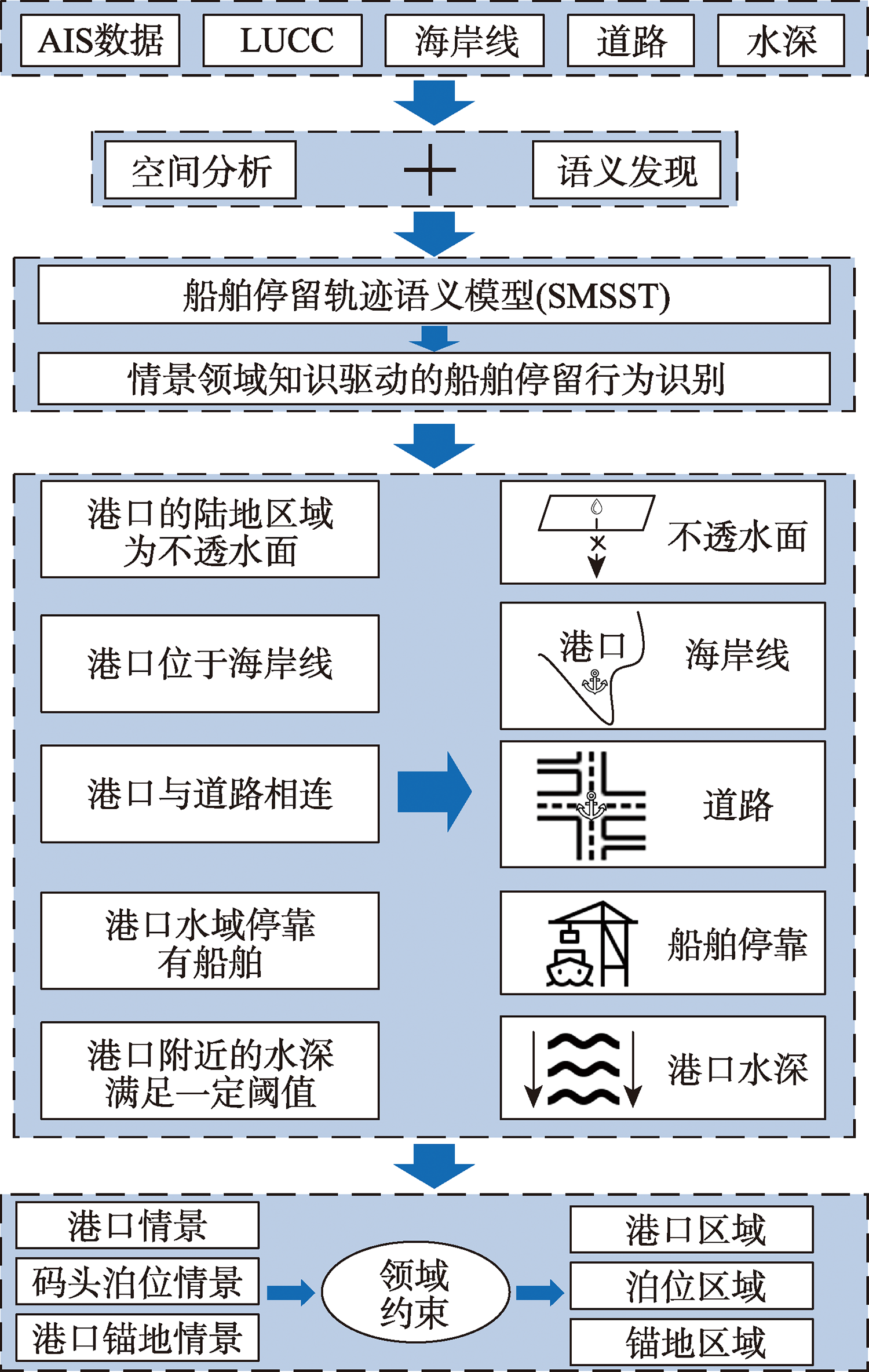
港口目标识别是海事船舶监管的重中之重,船舶自动识别系统(Automatic Identification System,AIS)所获取的船舶活动信息,可为港口目标识别提供高时相和高精度的船舶航行数据。为了探究AIS数据在港口目标识别中的应用,提出一种基于多源数据和船舶停留轨迹语义建模的港口目标识别方法。通过数据挖掘和语义信息增强构建船舶停留轨迹语义模型,识别船舶港口停留轨迹;建立基于随机森林的船舶停留方式分类模型,分类船舶泊位停留轨迹和船舶锚地停留轨迹,并利用空间逐级合并方法提取港口泊位和港口锚地;综合船舶泊位停留轨迹、道路、海岸线、水深、土地利用与土地覆盖等数据,顾及情景-领域知识实现港口目标识别。基于2017年96 790艘船舶的超8300万条AIS轨迹记录,应用本文方法识别南海研究区的港口目标。实验结果表明,本文方法对于船舶轨迹停留行为总体分类精度为0.9477, Kappa系数为0.8948。提取出南海研究区447个港口区域,与Google Earth影像叠加验证结果表明,提取结果均位于真实的港口影像内,相较于Natural Earth数据集中包含的南海区域24个港口点位,提取结果的完整性大大增强。因此,基于多源数据和船舶停留语义建模的港口目标识别方法对于港口目标识别具有较高的准确性和完整性。此外,该方法提取的港口区域可为基于遥感影像的港口目标识别提供靶区,从而提高大区域甚至全球范围内港口目标动态识别的效率。
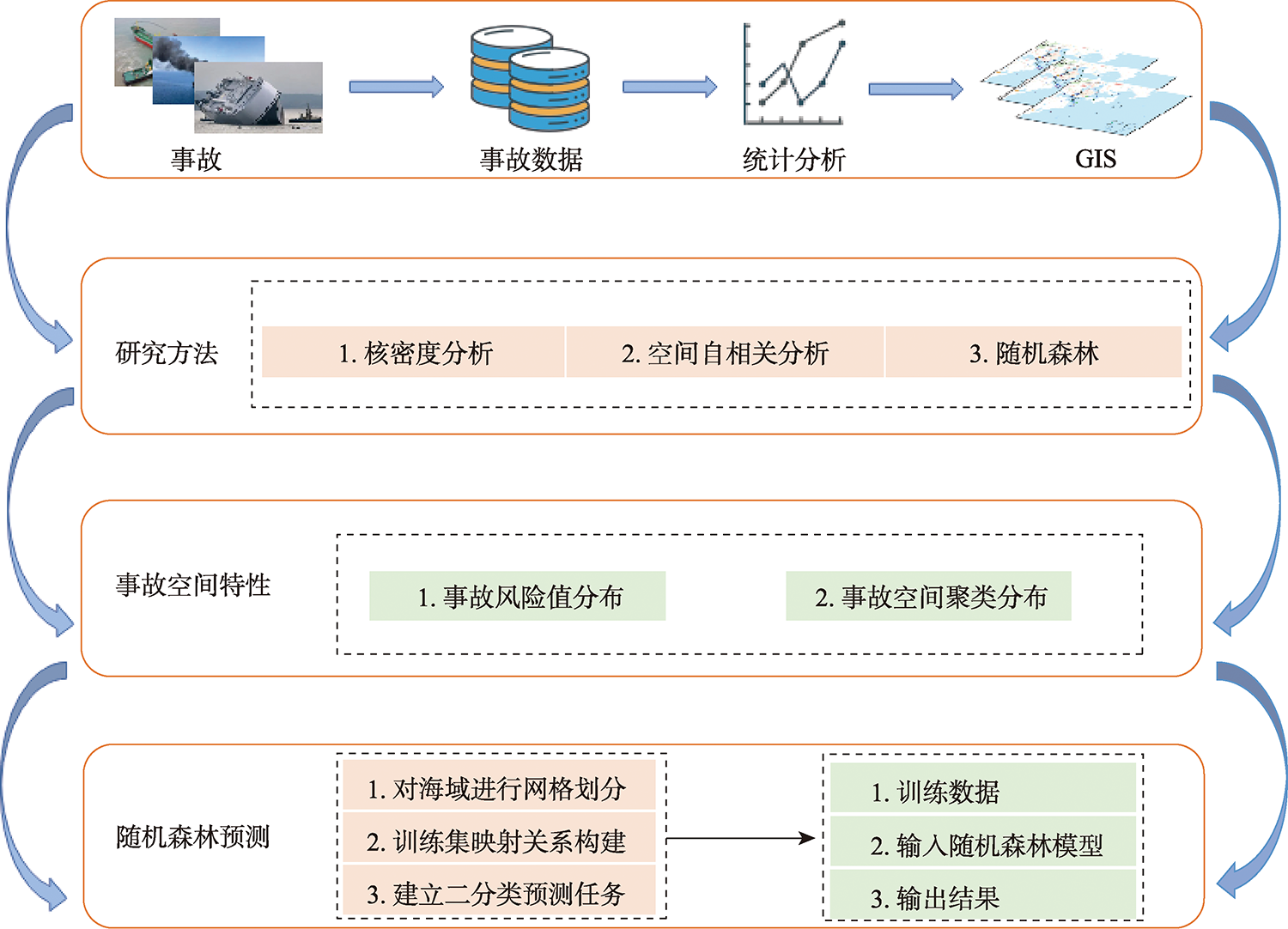
利用海上交通事故空间分布特征进行安全分析是海上交通安全管理的重要组成部分。本文使用厦门港2008—2020年的海上交通事故数据,经过事故数据空间分布特征提取、分析及预测等流程,最终得到厦门水域海上交通事故潜在危险区域。本文首先使用原始事故数据在GIS软件中进行空间定位,形成事故点的可视化空间分布图,然后使用核密度分析法鉴别海上交通事故多发区域,再利用空间自相关分析法,得到该区域事故空间的分布特征和具体的聚集点,最后使用该分布特征、对目标水域数据进行标准化网格切分,并利用机器学习算法对潜在事故风险区域进行预测。本文在核密度分析结果中发现:就事故频度而言,厦门湾和西海域交通事故频度较高。在空间自相关分析的结果中表明:就空间分布特征而言,厦门港的空间分布出现聚集特征且为空间正相关模式,且就事故具体的空间聚集点而言,厦门湾和西海域仍是事故高发的中心区域。而最后的厦门湾及周边水域风险预测模型显示:潜在事故风险区域多位于沿海和河口交汇区域。本文研究结果表明在基于地理空间数据分布特征提取和网格化分析的基础上,结合机器学习方法(随机森林),对于海上交通事故的预测具有良好的效果。
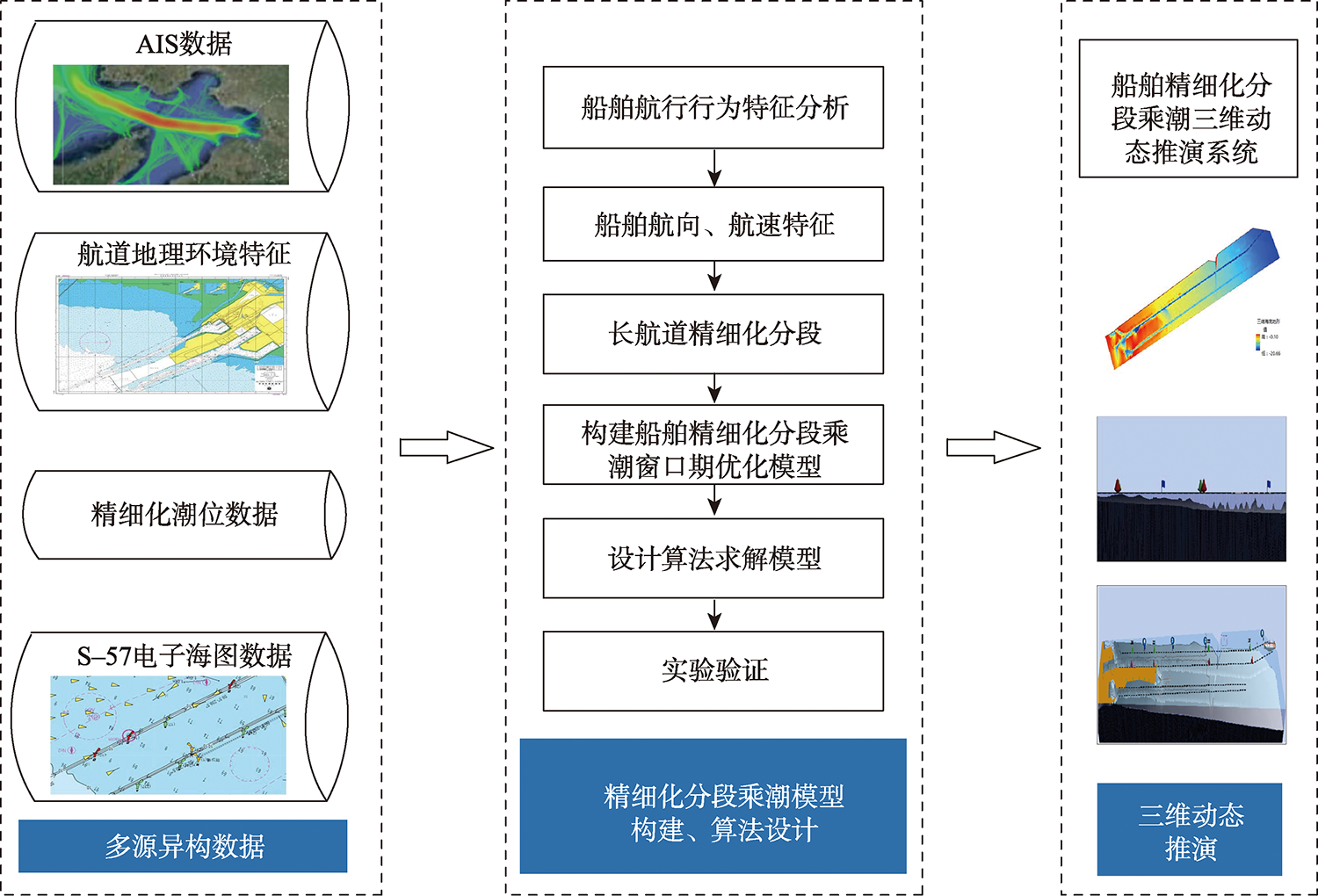
针对大型船舶长航道乘潮进港窗口期时长不充足问题,本文提出了基于船舶自动识别系统(Automatic Identification System,AIS)数据、港口潮汐数据、官方电子海图数据和航道地理位置数据等多源海事数据的大型船舶长航道精细化分段乘潮模型。首先,基于AIS数据采用K中心点算法对大型船舶乘潮航行行为特征进行挖掘,识别出大型船舶乘潮航迹关键点,计算大型船舶乘潮航行行为变化关键船位点。接着,结合长航道地理环境特征和大型船舶航行行为特征对长航道进行精细化分段,在此基础上基于港口潮汐数据构建大型船舶精细化分段乘潮窗口期计算模型。其次,设计乘潮历时自适应排列算法求解大型船舶乘潮最长窗口期;然后,以黄骅港综合港区航道为例验证了本文所提出的精细化分段乘潮模型。最后,基于电子海图数据利用地理信息系统平台实现大型船舶精细化分段乘潮三维动态推演,进一步验证大型船舶精细化分段乘潮航行的安全性。结果表明,该模型能够有效增加大型船舶乘潮进港窗口期时长,提高大型船舶乘潮进港效率,可为港航管理部门制定大型船舶进港计划提供理论指导。
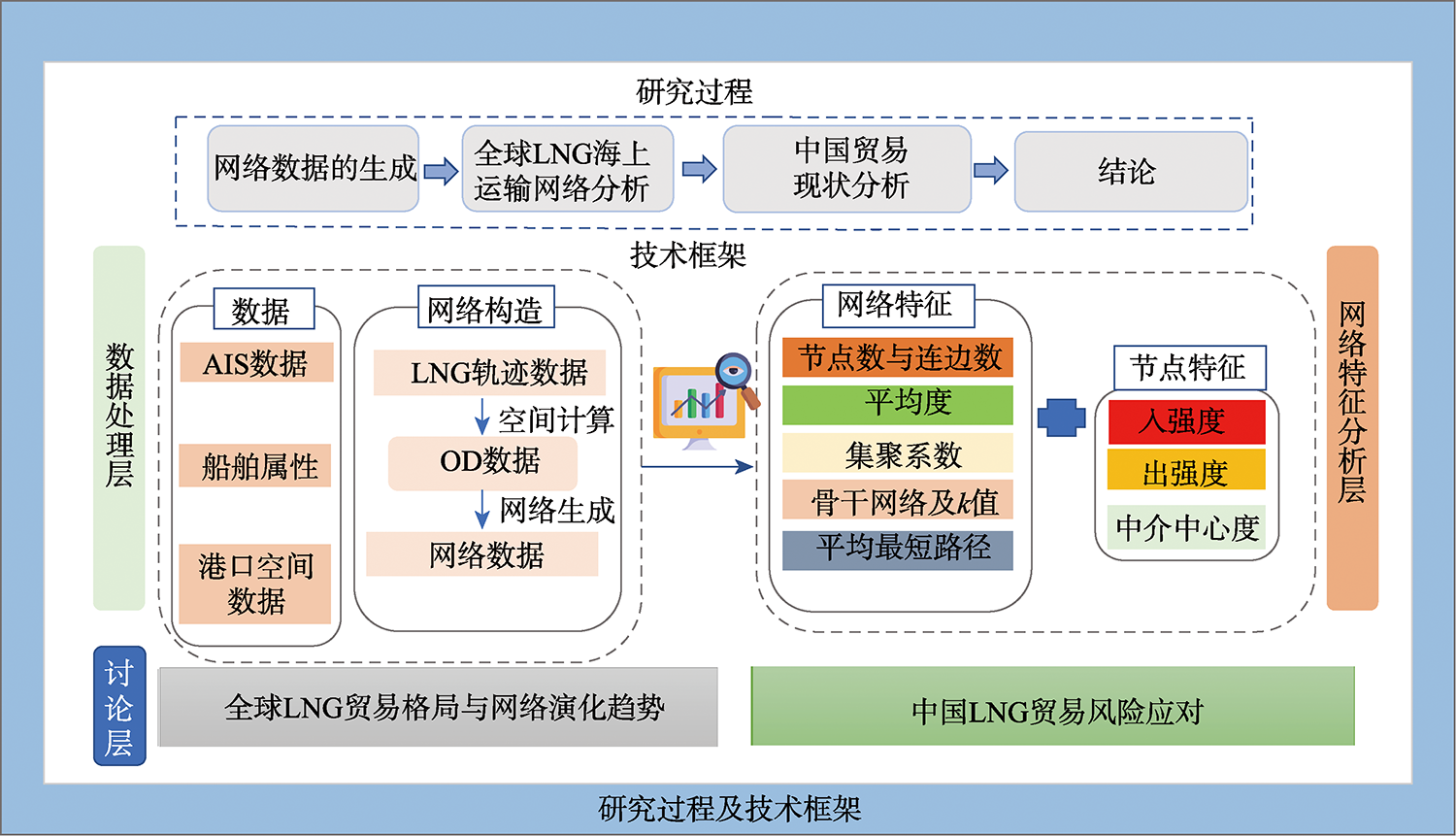
随着“碳达峰”、“碳中和”发展目标的提出,液化天然气(Liquefied Natural Gas,简称LNG)作为清洁低碳能源逐渐受到能源市场的重视。在此背景下,重点分析LNG海上运输网络演化模式,对掌握全球能源格局动态和中国的进口贸易现状具有重要意义。本文利用船舶轨迹数据和复杂网络理论,聚焦2018—2020年全球LNG海上运输网络演化趋势;同时针对中国的贸易现状,重点分析中国LNG进口来源、主要进口港分布及进口量排名前三的进口港的货源流入状况。结果表明:① 2018—2020年,全球LNG海上运输网络呈扩大趋势,并呈现出“无标度”特性;同时骨干网络节点连接的“广度”和“深度”正在增强,全球LNG贸易存在趋于垄断的风险;② “一带一路”国家贸易参与度强,中北美、南亚和东南亚地区的进口港数量和进口航次数增长尤为明显,萨贝塔、邦尼按照贸易出口量排名已进入全球前八;③ 网络的平均最短路径值在2018—2020年逐年递增,“转运港”业务新模态逐渐兴起;截止到2020年共有21个转运港口参与LNG贸易中,美国占据全球转运的主导地位;④ 中国的LNG进口货量规模发展迅速,海上运输网络流向趋于多元,但澳大利亚仍占据主要来源地位;按照进口量统计天津港、深圳港和永安港排名前三,“减碳”压力促使经济发达地区建设接收站并且不断增大进口量。
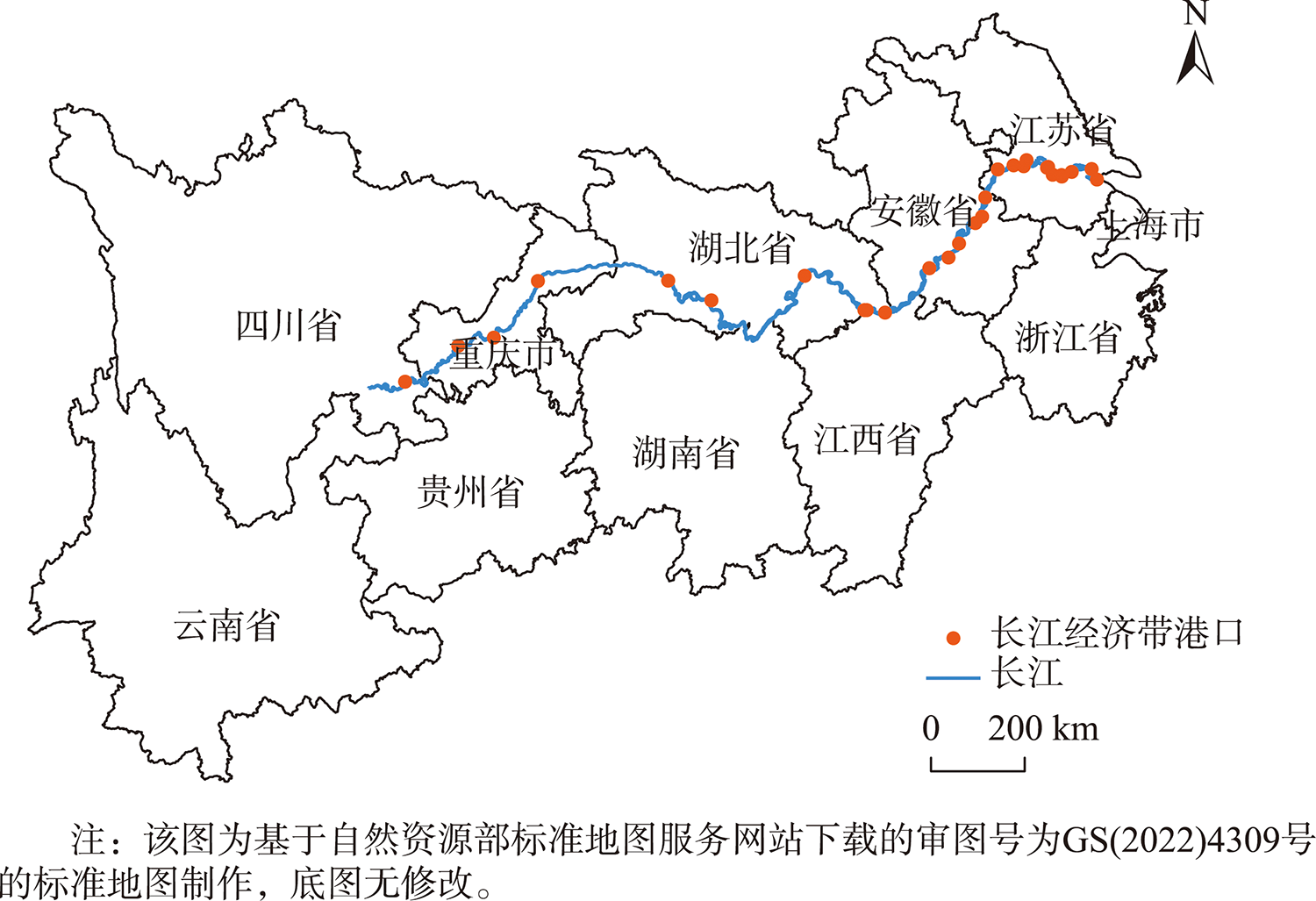
内河港口是内河航运纽带的重要节点,评估内河港口的区位优势度对长江经济带港口基础设施建设等具有重要意义。以2021年长江沿岸内河港口为研究对象,采用多源数据,结合长江内河港口辐射范围内的3个指标并对原模型进行改进,结合AHP-EWM模型计算长江经济带长江沿岸28个港口的区位优势度,研究结果显示:① 除重庆和武汉以外,江苏省以外的其他省份港口辐射范围内交通网络密度都比较低;从交通干线影响度来看,分布比较均衡且数值较为相近;而城市经济影响力的空间分布较为无序;② 根据区位优势度的高低以及空间分布得出长江经济带货运港口空间格局为“三中心,一组团”的空间格局;③ 将内河港口按长江岸线所属省份进行划分后发现:江西省3个港口区位优势度差异最小,但其优势度也整体偏低;安徽省与江西省类似;江苏省整体优势度较高且差异小,湖北省的优势度差异最大,表明存在基础设施建设不均衡等问题且亟需改善。研究成果可对长江经济带内各个港口范围内基础设施建设、道路交通规划、港口选址等方面提供指导性意见帮助打通铁路、高等级公路进港“最后一公里”。
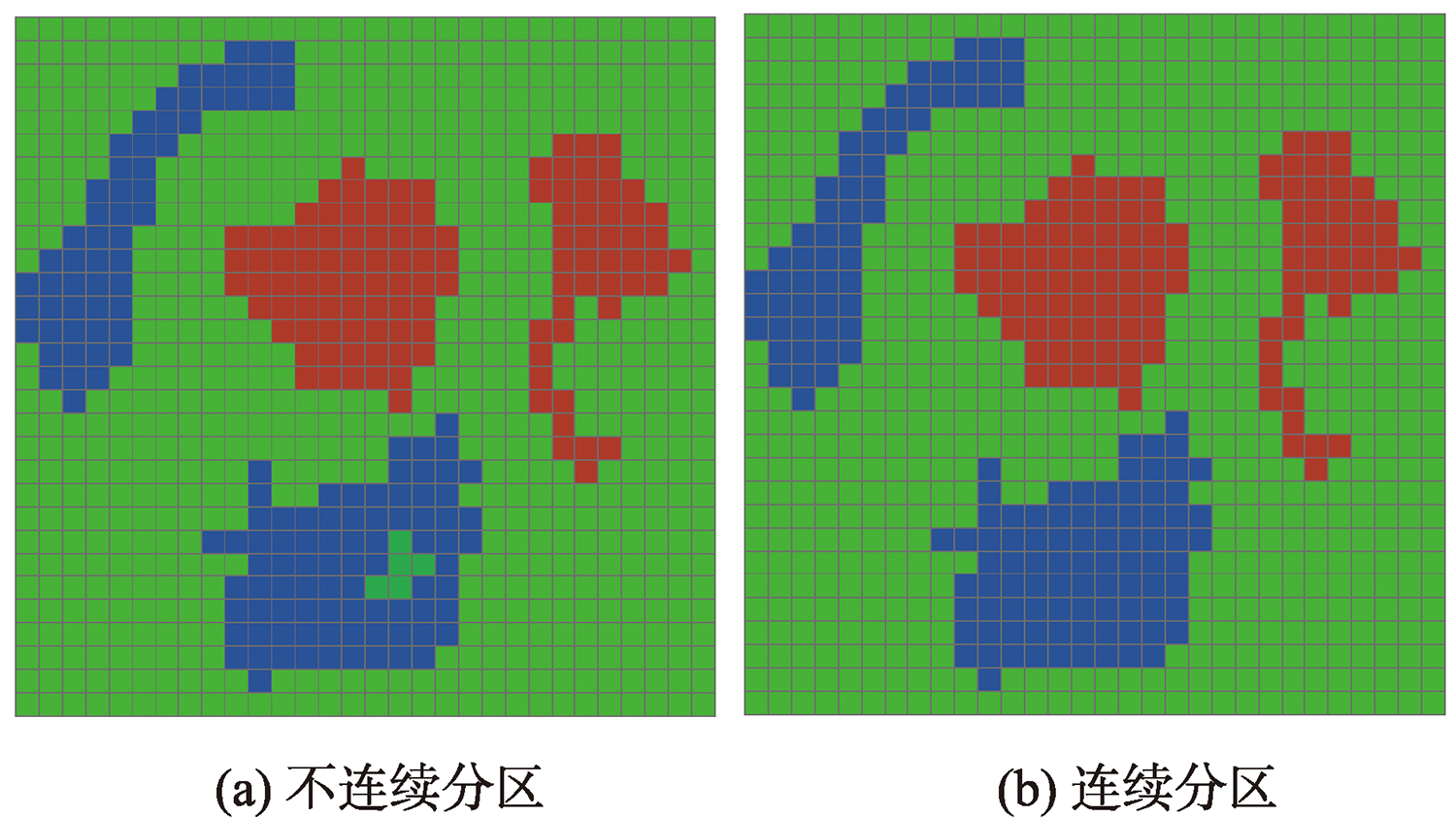
区划问题是将特定地理区域划分为若干空间连续的分区,满足分区内差异最小和分区间差异最大这一基本原则,广泛应用于地理、环境、生态、经济、农业、城市等领域。1960s以来,学者尝试建立各种区划问题数学模型,设计了一系列的求解算法,代表性的算法主要有:AZP、ARISEL、SKATER和REDCAP。本文提出了一个基于迭代局部搜索(ILS)的区划问题算法,进一步提升算法性能。该算法主要机制包括:邻域单元移动搜索改进分区质量;参照中心单元快速计算分区方差,提升算法速度;使用扰动机制跳出当前解局部最优状态;更新分区中心点提升分区方案目标值;使用群搜索探索更大的解空间;以及算法各步骤中通过分区空间连续判断和破碎修复保持分区空间连续。55个基准案例测试表明: ILS算法求解质量优于ARISEL和SKATER算法。一个多指标气候分区实验也表明: ILS算法求解质量优于SKATER、REDCAP和ARISEL算法。
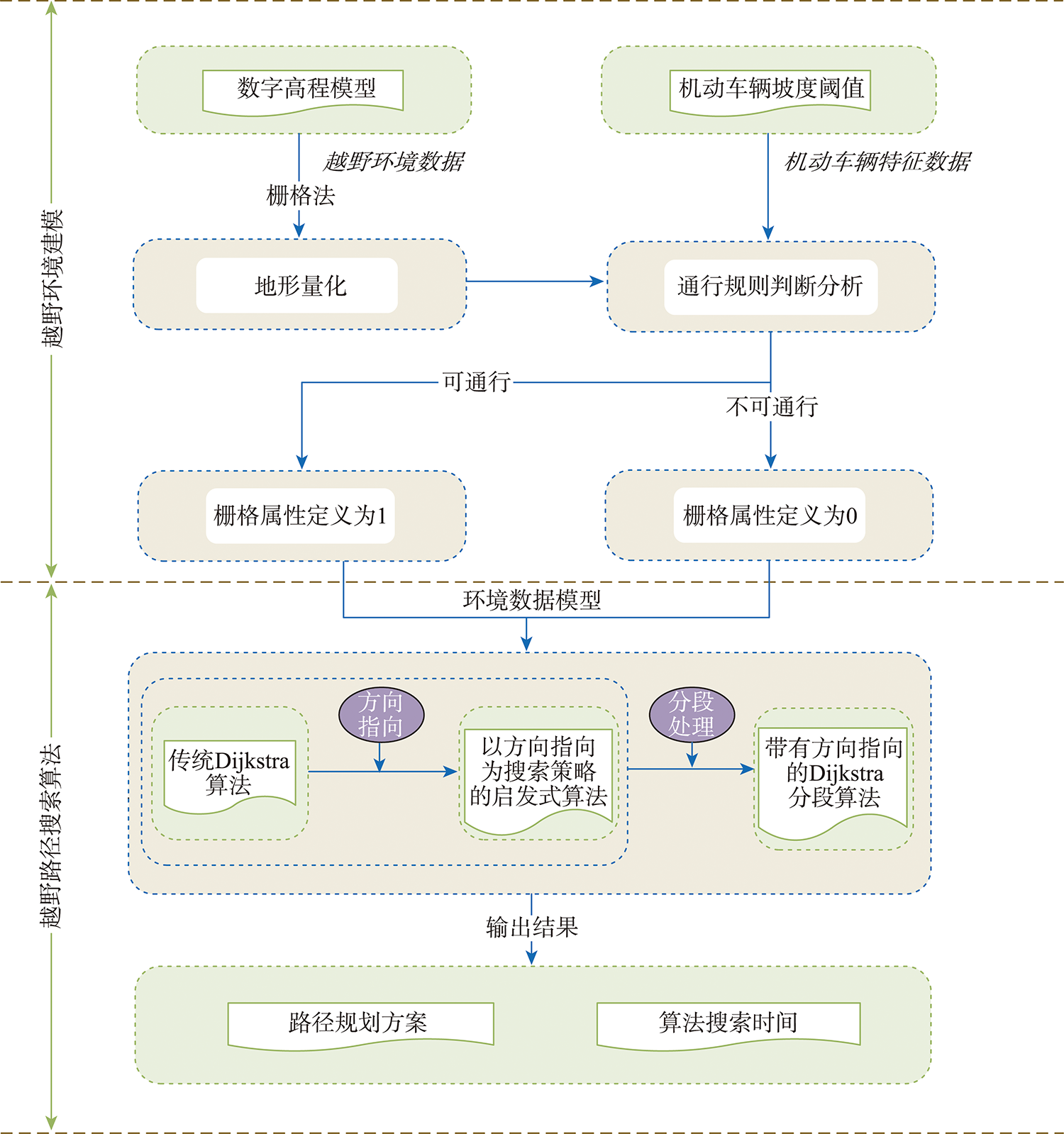
越野环境下机动车辆的快速路径规划在野外搜救、应急抢险及军事作战等领域均具有重要意义,在以上场景中,随着空间维数的增加,传统路径搜索算法计算复杂性急剧增长,可能无法在既定时间内求解可靠路径。为解决上述不足,本文结合越野路径规划不受路网通行限制以及两点之间直线最短的特点,提出以方向指向作为搜索策略的启发式算法,该算法搜索效率大幅提升,却难以保证求解质量。为进一步提高求解质量,提出了带有方向指向的Dijkstra分段算法,该算法在较低精度环境模型下通过Dijkstra算法找到最优路径,并将该路径进行分段,各分段以方向指向作为搜索策略进行路径搜索,从而在长距离越野路径规划中快速规划通行方案。为验证该算法的有效性,本文利用山西省某市的数字高程模型数据进行实验,引入了窗口移动法对地形进行先期的坡度计算和通行性分析,构建越野环境模型,调用路径搜索算法进行规划。实验结果表明,本文所提算法相比Dijkstra算法计算效率得到了大幅提升,且规划路径的长度接近于最优解。
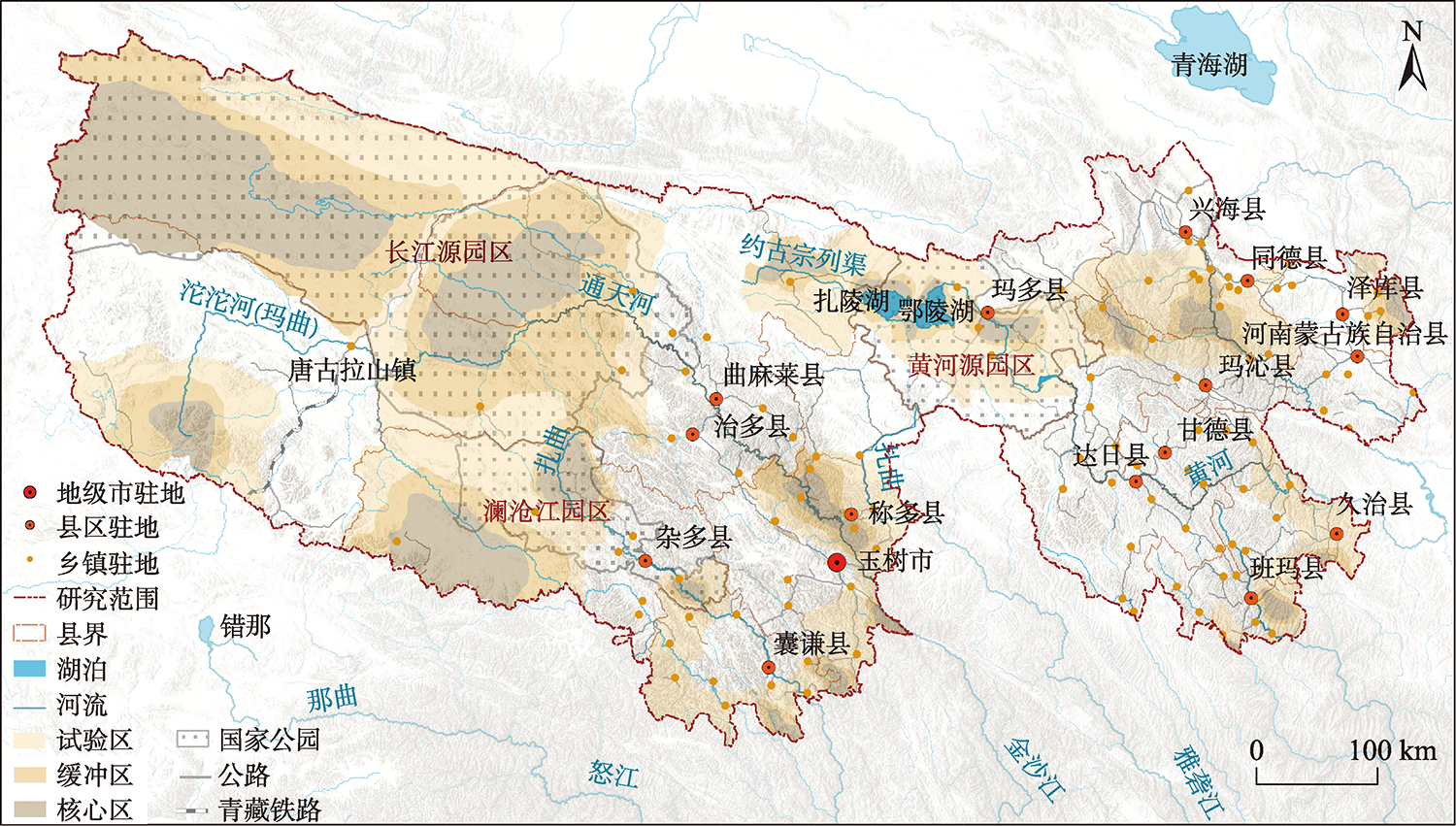
三江源地区是国家重要生态安全屏障和生态文明先行示范区。科学认知三江源地区生态空间、农业空间、城镇空间的空间格局演变特征及驱动机制,对于促进国土空间格局优化具有重要意义。首先从单一土地利用类型入手,分析1992―2020年的变化特征;然后结合土地分类和量化评价辨识出农牧空间,进而界定出“三区空间”并对其演变特征进行分析;最后,利用地理探测器分析变化背后的驱动机制。结果表明:① 三江源地区城镇空间增幅达774.56%;生态空间和农业空间以2005年和2015年为转折点,分别呈“U”字型和倒“U”字型变化趋势;② 研究区仅发生了4种交叉转换:生态空间转农业空间规模为1154.1 km²,多发生在气候变化主导区,转化量大但速度在逐步放缓;农业空间转生态空间规模为1140.8 km²,多分布在气候与人类活动共同作用区,转化速度呈明显变快趋势;农业空间和生态空间转为城镇空间的总量分别为41.0 km²和12.3 km²,多分布在县(市)驻地镇附近,转化速度在三个阶段表现为“缓慢增长―变快―减缓”的态势;③ 地理基础条件是“三区空间”格局演化的基本动力和前提,制约着交叉转换的位置和方向;社会经济因素是演化的关键驱动力,对交叉转换规模和速度均具有显著影响;生态保护政策在2005年之后驱动作用显著,尤其在“生态―农业”空间的相互置换过程中发挥着稳定作用。本研究可为牧业地区主体功能降尺度传导和国土空间用途管制提供新思路,可应用于三江源地区生态环境保护决策和各级国土空间规划编制工作。
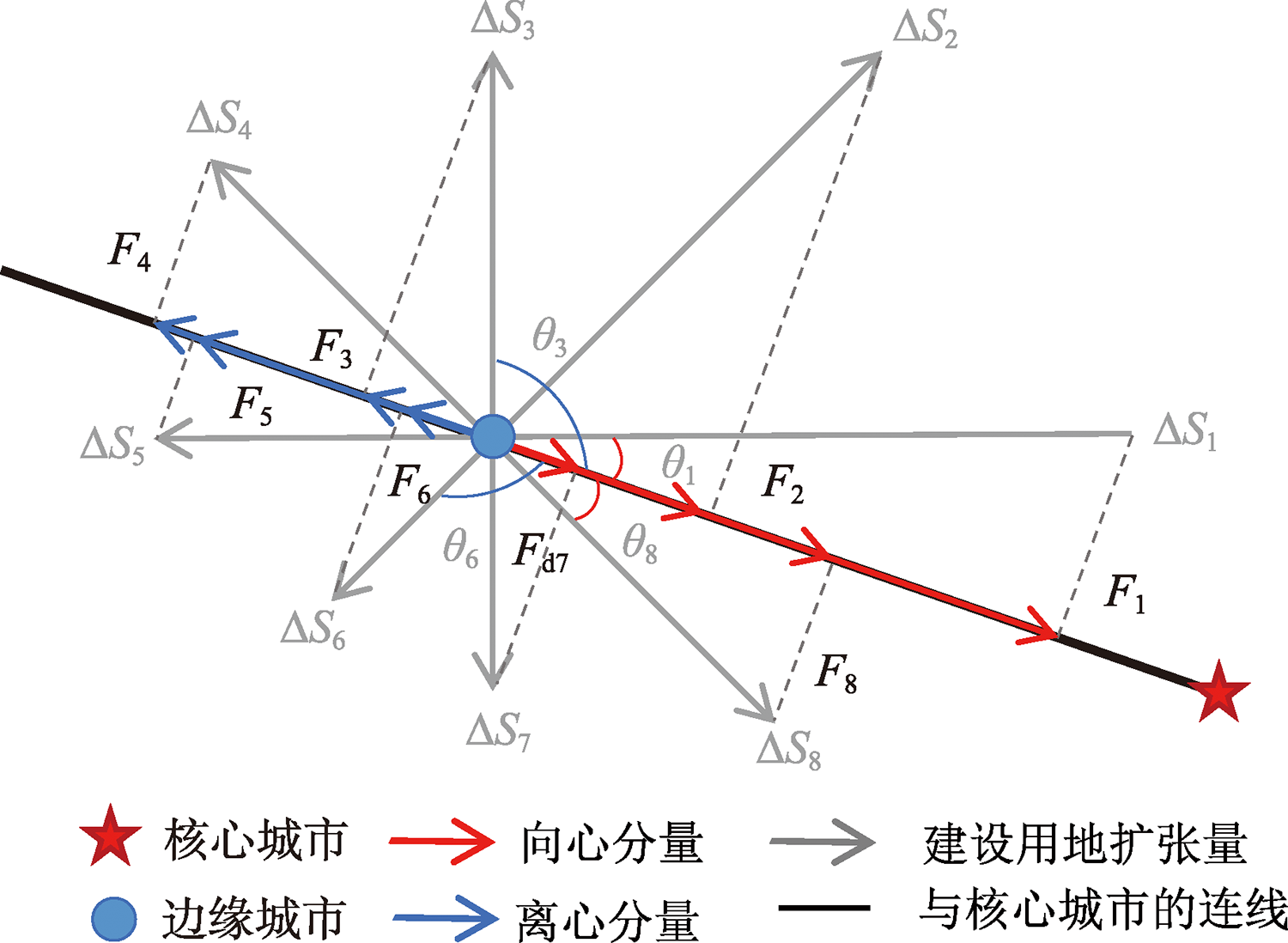
探究城镇空间扩张的方向性及其时间变化特征,能够反映都市圈发展过程中核心城市与边缘地区空间关联的动态过程,为制定都市圈发展的相关政策提供科学依据。本文从都市圈的核心城市与边缘地区相互关联的视角,借鉴物理学中力的分解原理,构建了同时兼顾扩张强度和方向性的向心扩张指数CEI,并以郑州都市圈为对象,采用2000—2018年30 m分辨率的全球人造不透水面数据产品GAIA,分析了建设用地扩张的总体数量和占比变化、动态度及强度变化、以及空间方向性变化等特征,进一步应用多元逻辑回归模型,揭示了影响城镇空间扩张向心性的关键因素。结果表明:① 向心扩张指数CEI为揭示都市圈核心城市对边缘地区的辐射带动作用提供方法支撑,能够定量刻画边缘地区朝向核心城市的发展趋势;② 在郑州都市圈近20年的快速扩张过程中,尽管各区县市的DEI指数和CEI指数随时间而增减波动,但郑州都市圈总体呈现“核心—边缘”发展模式,除个别地级市中心城区及其下辖县以外,多数区县市的向心性显著且随时间增强,郑州市中心城区对于边缘地区具有显著的辐射带动作用;③ 核心城市与边缘地区的人均GDP差异及城镇化率差异是影响边缘地区向心扩张的重要因素,与核心城市是否相邻、行政隶属关系及行政等级也对向心扩张具有一定影响。
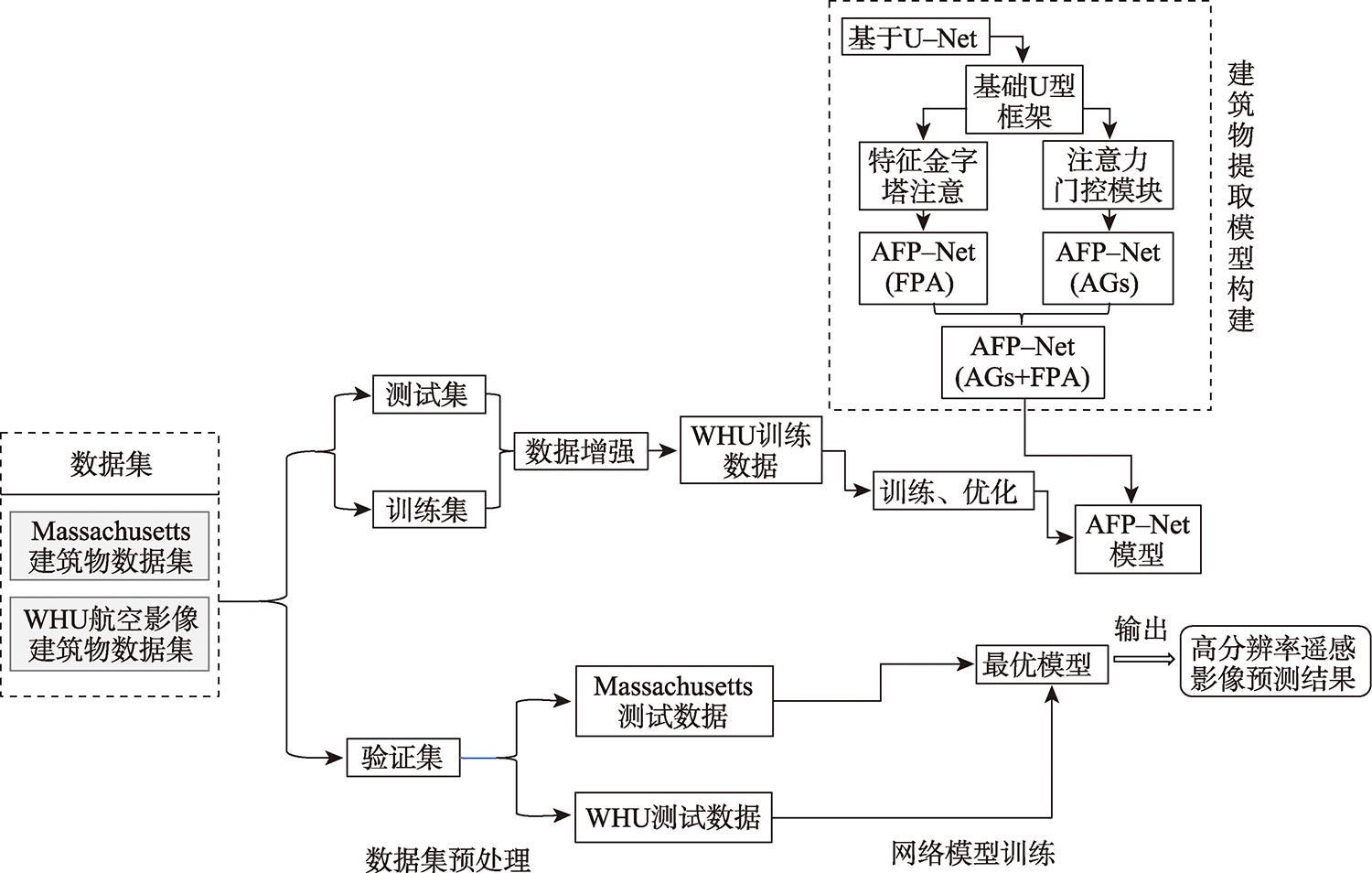
在高分辨率遥感影像中提取建筑物轮廓是地区基础建设信息统计的一项重要任务。适应性较强的深度学习方法已在建筑物提取研究中取得较大进展,受网络模型对影像特征表达的局限性,存在局部建筑轮廓边缘模糊的问题。本研究提出一种基于注意力的U型特征金字塔网络(AFP-Net)可以聚焦高分遥感影像中不同形态的建筑物结构,实现建筑物轮廓的高效提取。AFP-Net模型通过基于网格的注意力阀门Attention Gates模块抑制输入影像中的无关区域,凸出影像中建筑物的显性特征;通过特征金字塔注意力Feature Pyramid Attention模块增加高维特征图的感受野,减少采样中的细节损失。基于WHU建筑物数据集训练优化AFP-Net模型,测试结果表明AFP-Net模型能够较清晰地识别出建筑物轮廓,在预测性能上有更好的目视效果,在测试结果的总体精度和交并比上较U-Net模型分别提高0.67%和1.34%。结果表明,AFP-Net模型实现了高分遥感影像中建筑物提取的结果精度及预测性能的有效提升。
空间分层是准确度量遥感分类不确定性程度及其空间分布的基础与关键。本文提出了一种基于不确定性分析的遥感分类空间分层及评估方法,首先基于随机森林算法获取像元后验概率,确定分类不确定性度量指标;其次,采用模糊C均值进行空间分层;最后,对分层结果合理性进行定性与定量评估,并与同尺度数据产品精度评价结果及后验概率不确定性分层方法进行对比分析。以北京市顺义区Landsat 8 OLI遥感影像数据为例,研究结果表明:① 基于最大概率、模糊混淆指数和概率熵指标将顺义区分为不确定性大、中、小3层,相应的遥感数据层分类精度分别为62.28%、74.96%、79.31%;② 分类不确定性空间分层结果与度量指标大小的空间分布基本一致,错分地类图层与不确定性大层的地类空间分布基本一致;③ 遥感数据和数据产品的各层地类空间特征、层分类精度大小趋势一致,与总体分类精度相比,不确定性大层的层分类精度降低,不确定性小层的层分类精度提高;④ 与后验概率不确定性分层方法相比,本研究不确定性大层的层分类精度降低1.08%,不确定性中层提高3.58%,不确定性小层提高0.16%,q值由0.19提高到0.24,空间分异性更高。证实了研发的遥感分类不确定性空间分层结果的合理性。研究旨在提出适用于遥感分类的不确定性分层方案,用于优化遥感分类训练样本和精度评价验证样本的空间布设。
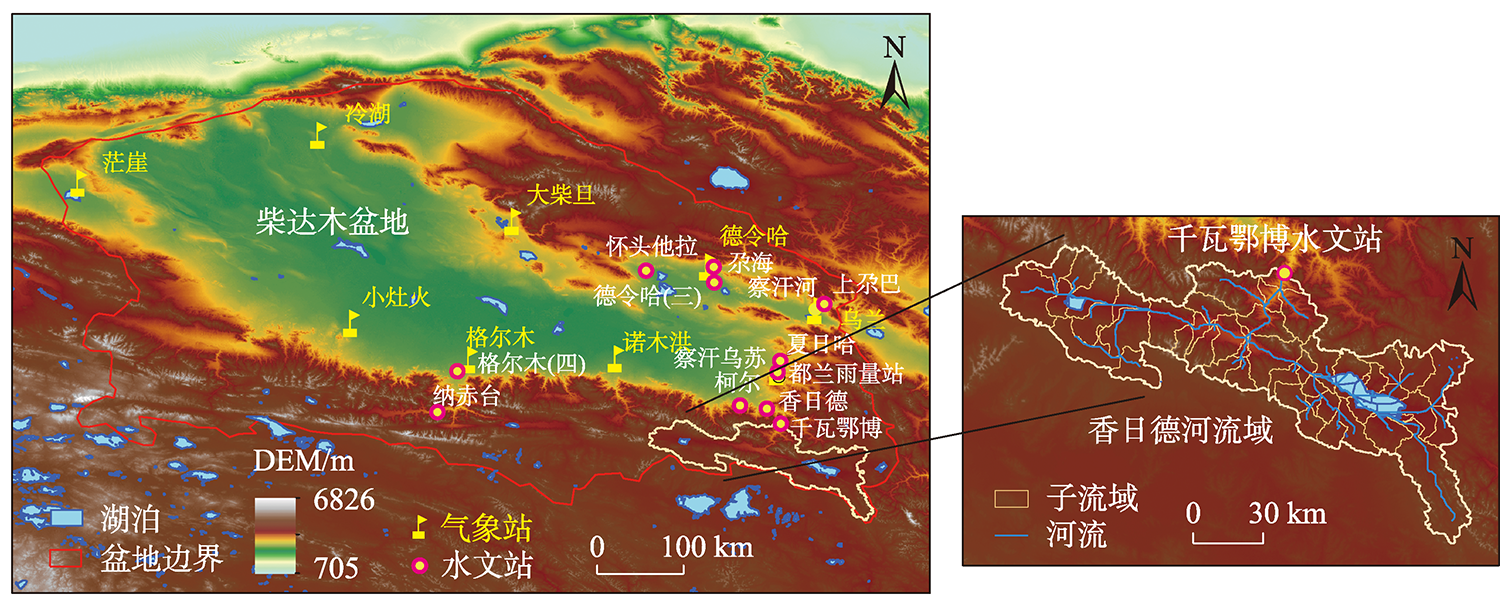
山区降水较集中,但降水测站多位于山谷或人口密集区,代表性差。遥感和再分析降水产品能提供时空分布连续的数据,不受地形条件限制。柴达木盆地中心属干旱荒漠区,水是制约该区开发的首要条件,其四周属高寒山区,降水相对较多,但降水监测十分薄弱。为获取该区相对精确的降水时空分布信息,本文评估了4套高分辨率降水产品(CMADS、TRMM、GPM和MSWEP)的适用性。首先基于地面站点数据评估它们在不同时空尺度上的精度,并分析它们在柴达木盆地的空间分布和年内分配特征。然后,以盆地东南隅的无测站山区香日德河流域为研究区,利用降水产品驱动SWAT模型来评估它们的分布式水文模拟适用性。结果表明:① MSWEP在年、月尺度上与站点降水的吻合程度最高(R ≥ 0.79,PBIAS = 0.5%),其次是GPM和TRMM,CMADS精度最低(R ≥ 0.64,PBIAS = 5.8%);② 从降水精度与站点高程的关系来看,降水产品在相对低海拔区容易高估站点降水,而在相对高海拔区常低估实际降水;③ 在香日德河流域,MSWEP(NSE = 0.64)在基准期(2009—2012年)的径流模拟表现明显好于其它降水产品(NSE = 0.36~0.59),变化期(2013—2016年)表现最好的是CMADS(NSE = 0.75,其余产品NSE = 0.53~0.68)。本研究可为缺资料干旱山区获取精确的降水时空信息和后续水资源的科学管理与规划提供重要支撑。
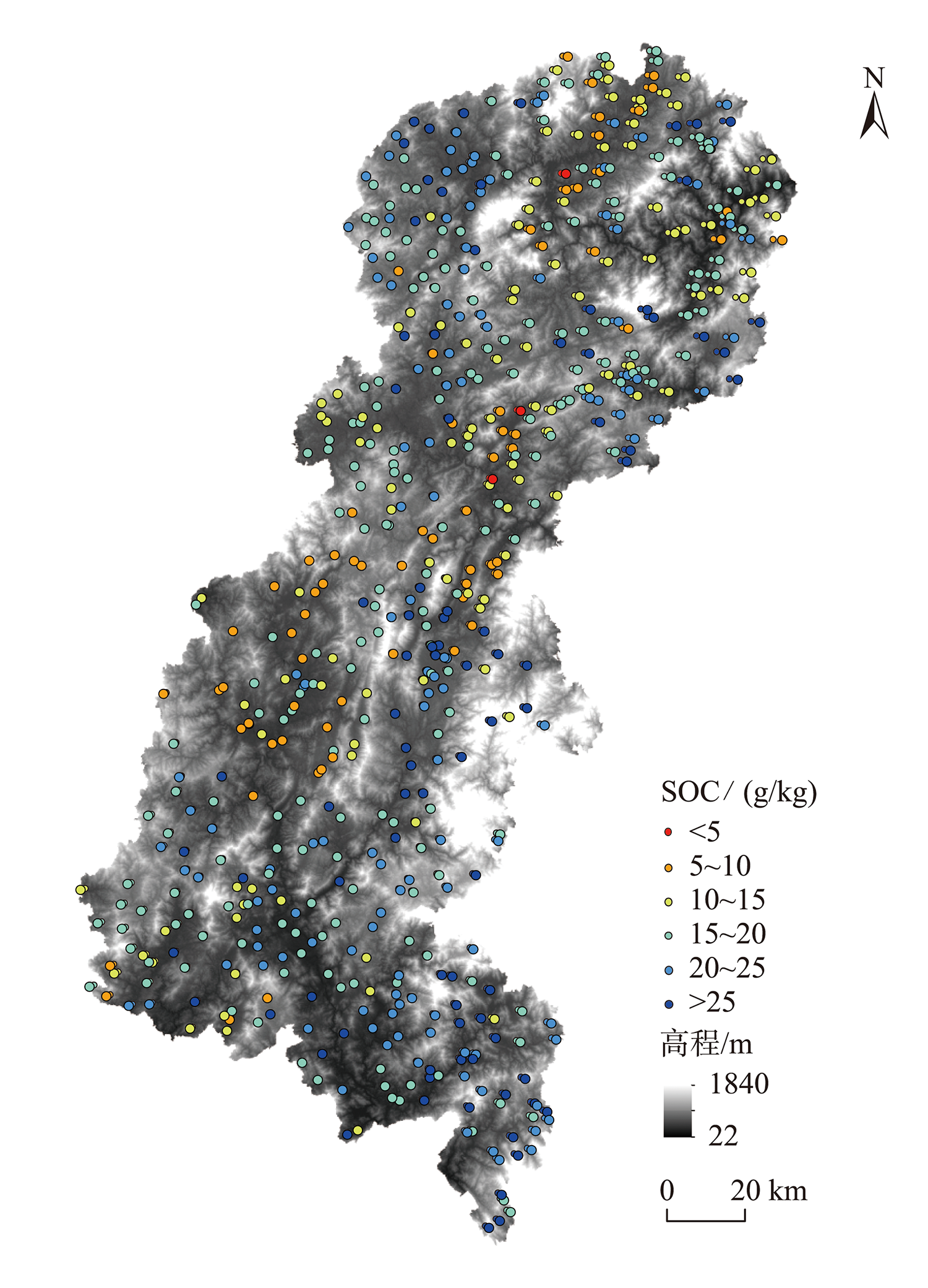
人类活动对表层耕地土壤有机碳(Soil Organic Carbon, SOC)影响强烈,但目前大范围复杂地貌地形区的耕地SOC数字制图对人为因素的空间刻画不足。本文以福建省西部耕地为研究对象,基于Sentinel-2/MSI时间序列数据提取轮作模式分类信息(Crop Rotation, CR),以及可反映轮作模式信息的植被特征变换变量(Harmonic Analysis of Time Series, HANTS),分别作为农业活动定性和定量因子,将常规气候和地形因子作为自然环境因子,并对不同类型环境变量进行组合(气候+地形、气候+地形+轮作模式、气候+地形+HANTS变量、气候+地形+轮作模式+HANTS变量)。基于随机森林模型(Random Forest, RF)对不同环境变量组合驱动的耕地表层SOC空间预测精度进行对比分析,探索以轮作模式为例的农业活动因子提高耕地表层SOC数字制图精度的可能性。结果表明,同时加入两种农业活动因子的RF模型表现最佳,其模型预测精度相较于纯自然环境变量驱动的模型有明显提高(R2提高了89.47%,RMSE和MAE分别下降了10.66%和12.05%)。轮作模式类型(CR)和HANTS变量两种农业活动因子均被保留参与建模,尤其是轮作模式类型显著影响耕地SOC,在最佳模型的环境变量重要性中排序第四。由此可见,轮作模式相关农业活动因子可有效提高耕地SOC空间预测精度。在所有RF模型中,年降水量(Annual Rainfall, Rainfall)的重要性排名都是第一位。通过最佳模型反演得出该区耕地土壤有机碳均值为18.22±2.99 g/kg,范围为8.25~30.69 g/kg,双季稻和烟稻种植区域SOC含量高于稻菜种植区域。研究结果为复杂地貌地形区耕地土壤有机碳协同变量的更新提供了新的思路。