
林区数字高程模型修正方法:顾及高程自相关的后向传播神经网络模型
|
李琳叶(1996— ),女,四川广安人,硕士生,主要从事空间数据质量改善。E-mail: lilinye2022@163.com |
收稿日期: 2022-10-09
修回日期: 2023-01-03
网络出版日期: 2023-04-27
基金资助
国家自然科学基金(42271438)
山东省自然科学基金项目(ZR2020YQ26)
山东省高等学校青创科技支持计划(2019KJH007)
Method for the Correction of Digital Elevation Models Over Forested Areas: Back Propagation Neural Network with the Consideration of Spatial Autocorrelation
Received date: 2022-10-09
Revised date: 2023-01-03
Online published: 2023-04-27
Supported by
National Natural Science Foundation of China(42271438)
Shandong Provincial Natural Science Foundation, China(ZR2020YQ26)
Project of Shandong Province Higher Educational Youth Innovation Science and Technology Program(2019KJH007)
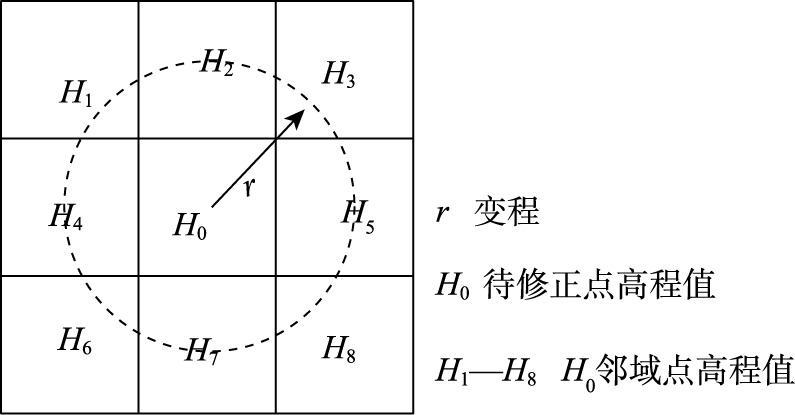
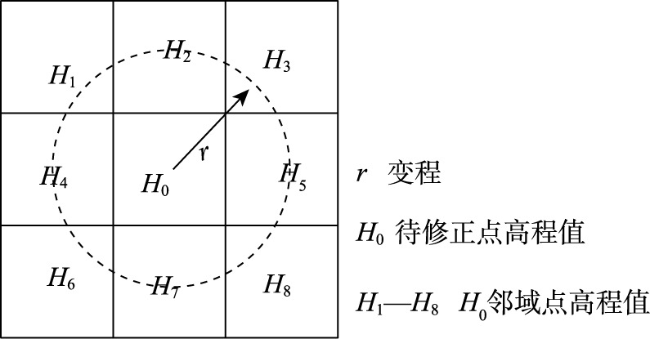
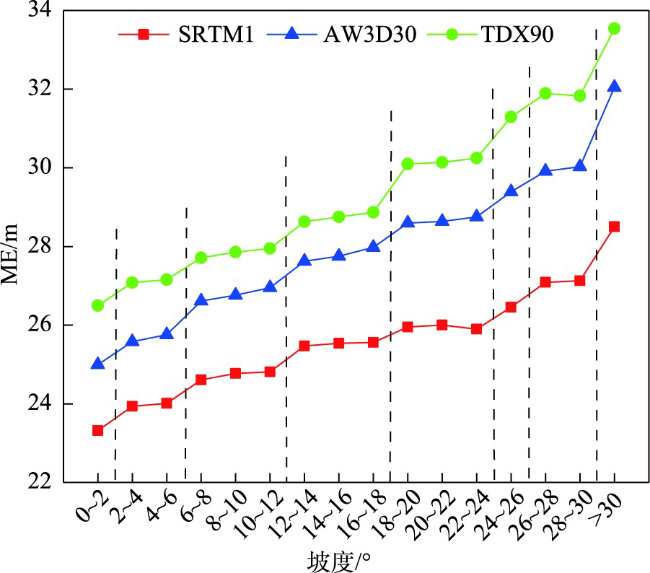
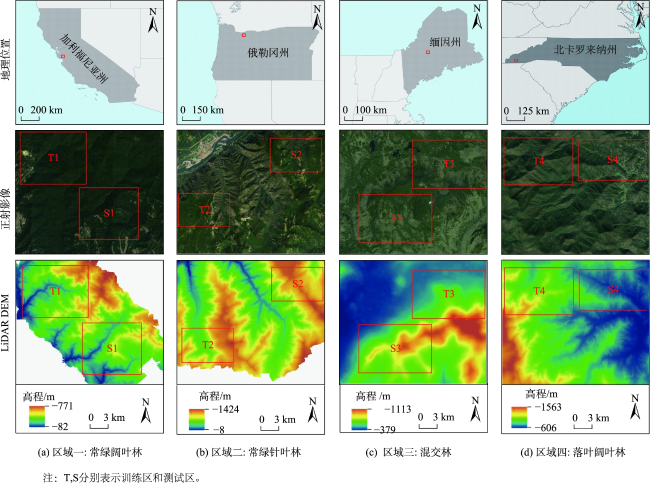
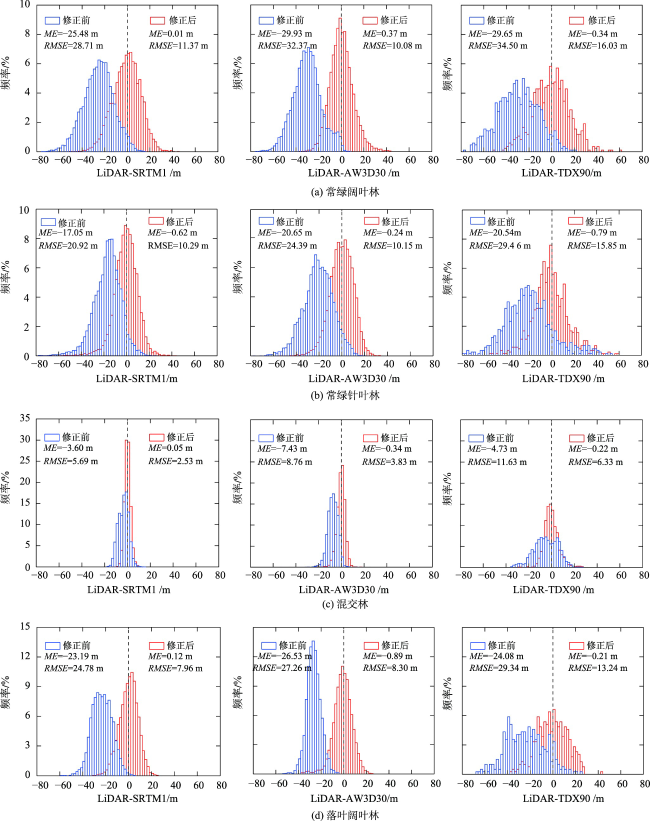
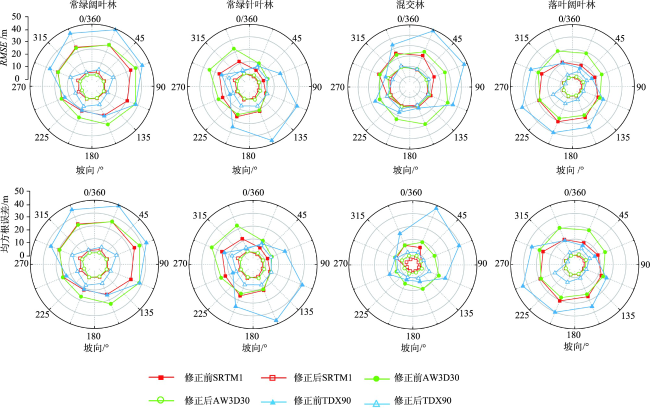
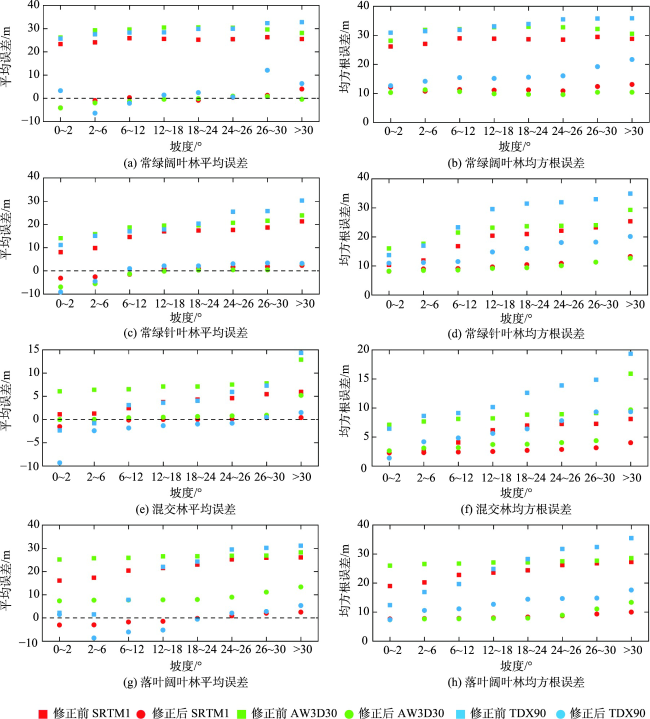
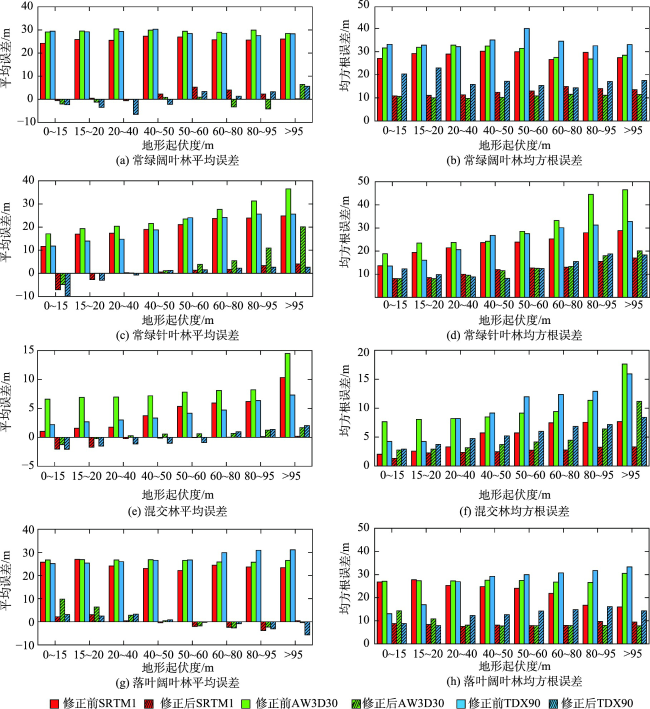
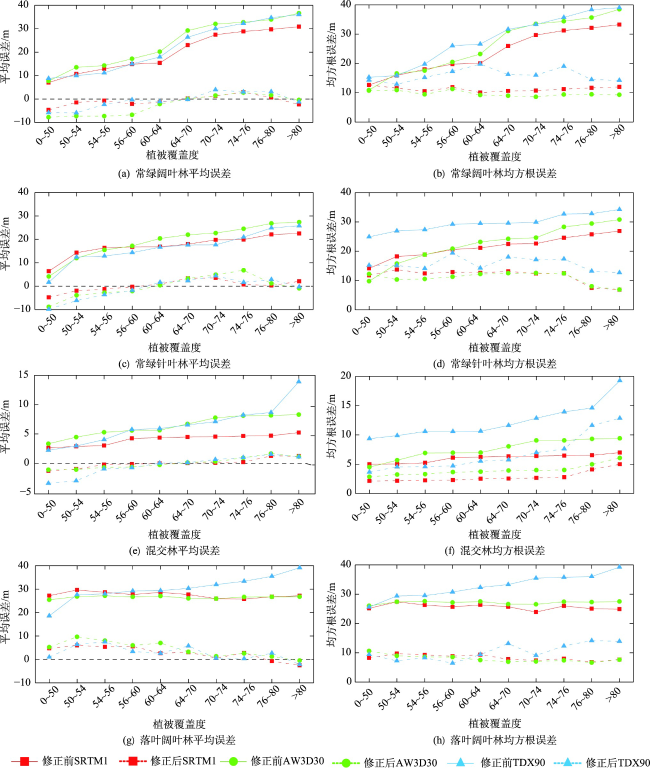
受植被遮挡影响,卫星遥感技术获取的全球数字高程模型(Digital Elevation Model,DEM)在林区难以准确描述真实地表形态,且在不同林区类型表现出不同系统偏差。为提高林区DEM精度,本文提出了一种顾及高程自相关的后向传播神经网络(Back Propagation Neural Network,BPNN)模型。该模型首先对训练区高程点拟合最优半变异函数以确定其变程,并将距离目标点变程以内的高程点作为高程自相关最优邻域,然后将地形因子(坡度、坡向、地形起伏度)、植被因子(植被高度、植被覆盖度)以及变程范围内高程点作为影响因子,DEM与对应LiDAR(Light Detection And Ranging)DEM高程差作为预测值,构建并训练BPNN模型,最后用训练好的模型修正测试区DEM。为了验证模型的实用性和高效性,本文以4种林区(常绿阔叶林、常绿针叶林、混交林、落叶阔叶林)DEM为研究对象,分别训练BPNN模型。同时,将修正结果与4种模型进行比较,包括综合利用4种林区类型数据训练的BPNN模型(BPNN-T)、没有使用地形因子的BPNN模型(BPNN-W)、没有顾及高程自相关的BPNN模型(BPNN-R)和多元线性回归模型(Multiple Linear Regression,MLR)。对上述4个林区的DEM(包括SRTM1、AW3D30、TanDEM-X(TDX)90)修正结果表明:① 与修正前相比,采用顾及高程自相关的BPNN模型显著提高了4种林区DEM精度,使其平均误差(Mean Error,ME)降至0~1 m,均方根误差(Root Mean Square Error,RMSE)降低了46%~70%; ② 修正前、后TDX90误差受坡向影响显著,AW3D30其次,SRTM1最小;修正前、后DEM的RMSE均随坡度和地形起伏度的增加而增大;③ 修正前DEM误差随植被高度和植被覆盖度的增加而增大,修正后该规律消失,表明BPNN有效消除了植被对DEM精度影响;④ 5种模型中,顾及高程自相关的BPNN预测效果最优,BPNN-T略次之,MLR和BPNN-W次之,BPNN-R效果最差。因此,充分考虑地形因子并分别对4种林区类型构建高程自相关训练模型可显著提高DEM精度。
李琳叶 , 李艳艳 , 陈传法 , 刘妍 , 刘雅婷 , 刘盼盼 . 林区数字高程模型修正方法:顾及高程自相关的后向传播神经网络模型[J]. 地球信息科学学报, 2023 , 25(5) : 935 -952 . DOI: 10.12082/dqxxkx.2023.220766
Due to the limitation of earth observation technology, the existing global Digital Elevation Model (DEM) datasets usually contain information of vegetation, buildings, and other non-ground objects. Especially in forested areas, the DEM data usually cannot describe the bare-earth surface precisely and show large systematic deviations. This study proposes a Back Propagation Neural Network (BPNN) model that takes into account the spatial autocorrelation of elevation to reduce the errors of bare-earth DEM in forested areas. This model first fits the optimal semivariogram to determine the spatial variation of elevation and takes the elevation points within the variation range from a target point as the optimal spatially autocorrelated neighborhood. Then, we train the BPNN model by using the terrain factors (i.e., slope, aspect, and terrain undulation), vegetation factors (i.e., vegetation height and vegetation coverage), and elevation points within the range of variation as the influencing factors, and using the elevation difference between DEM and Light Detection And Ranging (LiDAR) DEM as the predicted value. Finally, the trained model is used to correct the DEM in different forested areas. In order to verify the practicability and efficiency of the model, this paper takes the DEM products including SRTM1, AW3D30, and TanDEM-X (TDX) 90 of four types of forests (evergreen broad-leaved forest, evergreen coniferous forest, mixed forest, and deciduous broad-leaved forest) as the research objects, and trains the BPNN model respectively for each forest type. The correction result is compared with BPNN trained with all four types of forest data (BPNN-T), BPNN trained without terrain factors (BPNN-W), BPNN trained without spatial autocorrelation of elevation (BPNN-R), and multiple linear regression model (MLR). The results show that: (i) The BPNN model significantly improves the accuracy of DEM in the four forests, with the Mean Error (ME) close to 0-1 m and the Root Mean Square Errors (RMSE) reduced by 46%~70%; (ii) The aspect has the largest influence on the DEM correction for TDX90 while has little influence on SRTM1 DEM correction. Before and after correction, the RMSE of each DEM increases with the increase of slope and relief; (iii) The DEM error increases with the increase of vegetation height and vegetation coverage before correction, but this trend disappears after correction, indicating that BPNN effectively eliminates the impact of vegetation on bare ground DEM; (iv) BPNN has the highest prediction accuracy, followed by BPNN-T, MLR, and BPNN-W. And BPNN-R has the worst prediction accuracy. Therefore, the accuracy of DEM can be significantly improved by fully considering terrain factors and spatial autocorrelation of elevation for different forest types.
Key words: DEM; machine learning; error; correction; accuracy assessment; elevation autocorrelation; forest region
表1 LiDAR点云数据参数描述Tab. 1 LiDAR point cloud data acquisition parameter description |
| 林区类型 | 扫描设备 | 飞行高度 /m | 点密度 /(pts/m2) | 地面点密度 /(pts/m2) | 脉冲频率 /(KHZ) | 垂直精度 /cm | 水平精度 /cm | DOI |
|---|---|---|---|---|---|---|---|---|
| 常绿阔叶林 | Optech Titan (14SEN340) | 650~1250 | 48.77 | 1.32 | 50~300 | 12~23 | 5~15 | https://doi.org/10.5069/G9FN14B1 |
| 常绿针叶林 | RIEGL VQ-480i | 500 | 11.53 | 2.29 | 100 | 9 | 5~10 | https://doi.org/10.5069/G9M043H0 |
| 混交林 | ALTM(06SEN195) | 80~4000 | 6.16 | 1.42 | 33~167 | 1~36 | 5~10 | https://doi.org/10.5069/G9M61H5D |
| 落叶阔叶林 | ALTM (06SEN195) | 150~4000 | 8.91 | 0.47 | 33~167 | 3~73 | 5~30 | https://doi.org/10.5069/G9HT2M76 OT |
表2 训练区域和测试区域相关统计信息Tab. 2 Statistics for the training data and testing data |
| 林区类型 | 区域 | 面积/km2 | 点数/个 | 平均高程/m | 平均坡度/° | 平均植被高度/m | 平均植被覆盖度/% |
|---|---|---|---|---|---|---|---|
| 常绿 阔叶林 | T1 | 12 | 10 792 | 366 | 19 | 30 | 68 |
| S1 | 12 | 10 792 | 396 | 22 | 29 | 70 | |
| 常绿 针叶林 | T2 | 12 | 11 220 | 874 | 24 | 14 | 65 |
| S2 | 12 | 11 220 | 974 | 22 | 21 | 68 | |
| 混交林 | T3 | 12 | 11 352 | 625 | 14 | 14 | 75 |
| S3 | 12 | 11 352 | 684 | 12 | 14 | 70 | |
| 落叶 阔叶林 | T4 | 8 | 6739 | 732 | 15 | 22 | 82 |
| S4 | 6 | 5700 | 995 | 20 | 21 | 78 |
表3 4个林区训练区域高斯理论模型拟合结果及其参数Tab.3 Fitting results and parameters of Gaussian theory model for four forest training areas |
| 块金值/m2 | 基台值/m2 | 变程/m | R2 | |
|---|---|---|---|---|
| 常绿阔叶林(T1) | ||||
| SRTM1 | 0.65 | 652.23 | 147.00 | 1.00 |
| AW3D30 | 0.63 | 633.73 | 131.68 | 1.00 |
| TDX90 | 2.30 | 2299.51 | 361.23 | 1.00 |
| 常绿针叶林(T2) | ||||
| SRTM1 | 1.02 | 1021.48 | 148.53 | 1.00 |
| AW3D30 | 0.90 | 900.71 | 127.04 | 1.00 |
| TDX90 | 4.39 | 4398.87 | 359.44 | 1.00 |
| 混交林(T3) | ||||
| SRTM1 | 0.50 | 495.51 | 169.78 | 1.00 |
| AW3D30 | 0.37 | 368.63 | 146.33 | 1.00 |
| TDX90 | 2.21 | 2214.78 | 369.60 | 1.00 |
| 落叶阔叶林(T4) | ||||
| SRTM1 | 0.95 | 948.57 | 153.81 | 1.00 |
| AW3D30 | 0.82 | 815.88 | 130.67 | 1.00 |
| TDX90 | 3.27 | 3272.92 | 360.10 | 1.00 |
表4 测试区不同植被高度对修正前后DEM误差影响统计Tab. 4 Effects of different vegetation heights on DEM errors before and after correction in test sites |
| 植被 高度/m | SRTM1 | AW3D30 | TDX90 | |||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|
| ME/m | RMSE/m | ME/m | RMSE/m | ME/m | RMSE/m | |||||||
| 修正前 | 修正后 | 修正前 | 修正后 | 修正前 | 修正后 | 修正前 | 修正后 | 修正前 | 修正后 | 修正前 | 修正后 | |
| 常绿阔叶林 | ||||||||||||
| 0~6 | 2.35 | -0.72 | 6.15 | 5.78 | 3.59 | -1.37 | 5.00 | 2.21 | 1.35 | -0.46 | 8.98 | 3.03 |
| 6~10 | 2.48 | -0.57 | 8.82 | 6.84 | 5.65 | -4.34 | 8.05 | 4.81 | 5.50 | -3.97 | 5.50 | 3.97 |
| 10~14 | 7.68 | -1.82 | 13.96 | 13.29 | 7.52 | -7.90 | 11.36 | 9.18 | 10.36 | -2.26 | 6.01 | 4.91 |
| 14~18 | 15.51 | -2.81 | 21.55 | 11.90 | 16.12 | -10.56 | 20.84 | 14.75 | 14.66 | -1.74 | 20.39 | 9.58 |
| 18~20 | 21.23 | -3.00 | 26.39 | 11.78 | 23.56 | -5.47 | 27.90 | 11.35 | 22.65 | -3.56 | 27.38 | 12.38 |
| >20 | 26.14 | 1.01 | 29.14 | 10.95 | 30.70 | 0.46 | 32.89 | 9.26 | 30.19 | -0.87 | 34.90 | 15.80 |
| 常绿针叶林 | ||||||||||||
| 0~6 | 1.95 | -0.32 | 8.84 | 6.18 | -0.22 | -0.23 | 6.38 | 1.33 | 17.33 | 9.07 | 16.58 | 12.75 |
| 6~10 | 6.02 | -4.10 | 12.39 | 11.42 | 4.98 | -1.56 | 9.18 | 1.69 | 8.88 | 7.32 | 21.25 | 10.77 |
| 10~14 | 7.76 | -4.14 | 14.21 | 11.37 | 7.73 | -4.85 | 12.15 | 10.36 | 15.40 | 5.63 | 27.87 | 20.63 |
| 14~18 | 13.71 | -2.89 | 16.56 | 8.35 | 16.89 | -1.32 | 19.80 | 8.69 | 20.53 | -1.26 | 28.45 | 16.89 |
| 18~20 | 16.03 | 0.64 | 18.57 | 8.15 | 19.53 | 0.42 | 21.92 | 8.98 | 24.24 | -2.25 | 29.43 | 13.60 |
| >20 | 20.84 | 3.80 | 24.42 | 11.01 | 25.47 | 2.13 | 28.59 | 11.10 | 19.60 | -1.25 | 30.71 | 15.11 |
| 混交林 | ||||||||||||
| 0~6 | 1.03 | -0.36 | 1.85 | 1.03 | 2.60 | -0.85 | 3.98 | 2.49 | 1.56 | 0.16 | 5.43 | 1.14 |
| 6~10 | 1.32 | -0.12 | 2.80 | 2.23 | 5.06 | -0.81 | 6.33 | 2.80 | 2.13 | -1.45 | 8.19 | 2.98 |
| 10~14 | 1.96 | -0.27 | 4.16 | 2.46 | 7.41 | 0.23 | 8.69 | 3.24 | 4.09 | -0.15 | 11.76 | 3.75 |
| 14~18 | 6.10 | 0.49 | 7.27 | 2.48 | 7.92 | 0.86 | 8.73 | 3.40 | 5.80 | 1.06 | 12.25 | 6.16 |
| 18~20 | 6.75 | -0.15 | 7.45 | 2.60 | 8.09 | -1.20 | 8.91 | 3.80 | 10.94 | 1.38 | 12.35 | 6.43 |
| >20 | 7.48 | 0.72 | 8.20 | 3.20 | 8.77 | -1.08 | 9.36 | 4.11 | 17.34 | 1.64 | 17.35 | 6.57 |
| 落叶阔叶林 | ||||||||||||
| 0~6 | 27.75 | 5.51 | 28.53 | 8.87 | 26.53 | 19.76 | 26.98 | 8.17 | 27.30 | -1.68 | 29.32 | 9.99 |
| 6~10 | 32.24 | 7.53 | 32.61 | 9.08 | 28.74 | 5.43 | 28.80 | 7.07 | 36.90 | 11.33 | 36.90 | 11.33 |
| 10~14 | 28.79 | 5.73 | 29.72 | 9.15 | 27.17 | 5.08 | 27.85 | 8.54 | 23.55 | -3.47 | 23.95 | 7.37 |
| 14~18 | 28.24 | 3.24 | 29.13 | 8.08 | 27.05 | 2.81 | 27.56 | 6.65 | 34.98 | 7.30 | 36.77 | 12.96 |
| 18~20 | 24.87 | -0.56 | 25.88 | 6.78 | 26.56 | 1.26 | 27.10 | 6.37 | 30.70 | 3.83 | 32.98 | 11.15 |
| >20 | 21.33 | -2.02 | 23.12 | 7.69 | 26.56 | -0.44 | 27.37 | 7.63 | 19.71 | -1.85 | 26.52 | 14.14 |
表5 5种模型精度对比Tab. 5 Accuracy comparison of five models |
| 模型 | SRTM1 | AW3D30 | TDX90 | |||||
|---|---|---|---|---|---|---|---|---|
| ME/m | RMSE/m | ME/m | RMSE/m | ME/m | RMSE/m | |||
| 常绿阔叶林(S1) | ||||||||
| BPNN | 0.01 | 11.37 | 0.37 | 10.08 | -0.34 | 16.03 | ||
| BPNN-T | -0.61 | 12.12 | -0.69 | 10.52 | -0.61 | 16.09 | ||
| BPNN-R | -1.52 | 15.16 | 0.47 | 14.95 | -0.43 | 19.36 | ||
| BPNN-W | -0.86 | 13.31 | -1.65 | 14.18 | -0.67 | 18.52 | ||
| MLR | -0.39 | 13.26 | -0.21 | 12.16 | -0.98 | 16.72 | ||
| 常绿针叶林(S2) | ||||||||
| BPNN | -0.62 | 10.29 | -0.24 | 10.15 | -0.79 | 15.85 | ||
| BPNN-T | -0.24 | 10.61 | -0.41 | 10.75 | 0.57 | 16.95 | ||
| BPNN-R | -0.52 | 13.01 | -0.56 | 14.24 | 0.77 | 19.21 | ||
| BPNN-W | -0.70 | 12.44 | -0.32 | 14.25 | -0.73 | 18.84 | ||
| MLR | -0.13 | 11.03 | -6.42 | 12.67 | 3.76 | 21.22 | ||
| 混交林(S3) | ||||||||
| BPNN | 0.05 | 2.53 | -0.34 | 3.83 | -0.22 | 6.33 | ||
| BPNN-T | -0.08 | 2.83 | 0.33 | 4.88 | -0.46 | 6.48 | ||
| BPNN-R | 0.34 | 3.59 | -1.43 | 5.07 | -0.91 | 7.96 | ||
| BPNN-W | -0.67 | 3.14 | -0.57 | 4.62 | -1.11 | 7.21 | ||
| MLR | -1.00 | 2.91 | -1.81 | 4.98 | -4.07 | 7.93 | ||
| 落叶阔叶林(S4) | ||||||||
| BPNN | 0.12 | 7.96 | -0.89 | 8.30 | -0.21 | 13.24 | ||
| BPNN-T | -1.65 | 10.58 | -1.59 | 10.28 | -1.00 | 14.17 | ||
| BPNN-R | -1.76 | 9.83 | -3.01 | 11.04 | 0.12 | 16.22 | ||
| BPNN-W | 1.50 | 11.90 | 0.23 | 12.74 | -0.31 | 17.90 | ||
| MLR | -5.02 | 9.53 | -3.10 | 10.42 | -3.36 | 14.39 | ||
| [1] |
卢丽君, 张继贤, 王腾. 一种基于高分辨率雷达影像以及外部DEM辅助的复杂地形制图方法[J]. 测绘学报, 2011, 40(4):459-463.
[
|
| [2] |
汤国安. 我国数字高程模型与数字地形分析研究进展[J]. 地理学报, 2014, 69(9):1305-1325.
[
|
| [3] |
李振洪, 李鹏, 丁咚, 等. 全球高分辨率数字高程模型研究进展与展望[J]. 武汉大学学报·信息科学版, 2018, 43(12):1927-1942.
[
|
| [4] |
|
| [5] |
|
| [6] |
余婷婷, 董有福. 利用随机森林回归算法校正ASTER GDEM高程误差[J]. 武汉大学学报·信息科学版, 2021, 46(7):1098-1105.
[
|
| [7] |
|
| [8] |
|
| [9] |
|
| [10] |
|
| [11] |
蔡士雪, 岳林蔚, 尹超, 等. 顾及林区植被穿透率的多源DEM数据精度评价[J]. 遥感学报, 2022, 26(11):2268-2281.
[
|
| [12] |
|
| [13] |
|
| [14] |
|
| [15] |
|
| [16] |
|
| [17] |
|
| [18] |
张晨, 朱建军, 付海强. 基于ICESat-2数据及TanDEM-X DEM的林下地形反演[J]. 测绘工程, 2021, 30(1):60-65.
[
|
| [19] |
杨帅, 杨娜, 陈传法, 等. 顾及数据配准的江西省SRTM DEM精度评价和修正[J]. 地球信息科学学报, 2021, 23(5):869-881.
[
|
| [20] |
李文梁, 汪驰升, 朱武. 中国大陆地区TanDEM-X 90 m DEM误差空间分布特征[J]. 地球信息科学学报, 2020, 22(12):2277-2288.
[
|
| [21] |
|
| [22] |
|
| [23] |
沈焕锋, 刘露, 岳林蔚, 等. 多源DEM融合的高差拟合神经网络方法[J]. 测绘学报, 2018, 47(6):854-863.
[
|
| [24] |
刘纪平, 梁恩婕, 徐胜华, 等. 顾及样本优化选择的多核支持向量机滑坡灾害易发性分析评价[J]. 测绘学报, 2022, 51(10):2034-2045.
[
|
| [25] |
郭子正, 殷坤龙, 付圣, 等. 基于GIS与WOE-BP模型的滑坡易发性评价[J]. 地球科学, 2019, 44(12):4299-4312.
[
|
| [26] |
|
| [27] |
金鼎坚, 吴芳, 于坤, 等. 机载激光雷达测深系统大规模应用测试与评估——以中国海岸带为例[J]. 红外与激光工程, 2020, 49(S2):9-23.
[
|
| [28] |
刘茜, 杨乐, 柳钦火, 等. 森林地上生物量遥感反演方法综述[J]. 遥感学报, 2015, 19(1):62-74.
[
|
| [29] |
王绚, 范宣梅, 杨帆, 等. 植被茂密山区地质灾害遥感解译方法研究[J]. 武汉大学学报·信息科学版, 2020, 45(11):1771-1781.
[
|
| [30] |
杨必胜, 梁福逊, 黄荣刚. 三维激光扫描点云数据处理研究进展、挑战与趋势[J]. 测绘学报, 2017, 46(10):1509-1516.
[
|
| [31] |
陈传法, 王梦樱, 杨帅, 等. 适用于林区机载LiDAR点云的多分辨率层次插值滤波方法[J]. 山东科技大学学报(自然科学版), 2021, 40(2):12-20.
[
|
| [32] |
|
| [33] |
|
| [34] |
|
| [35] |
|
| [36] |
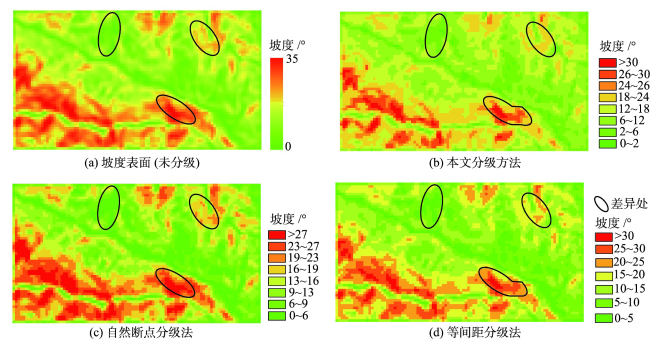
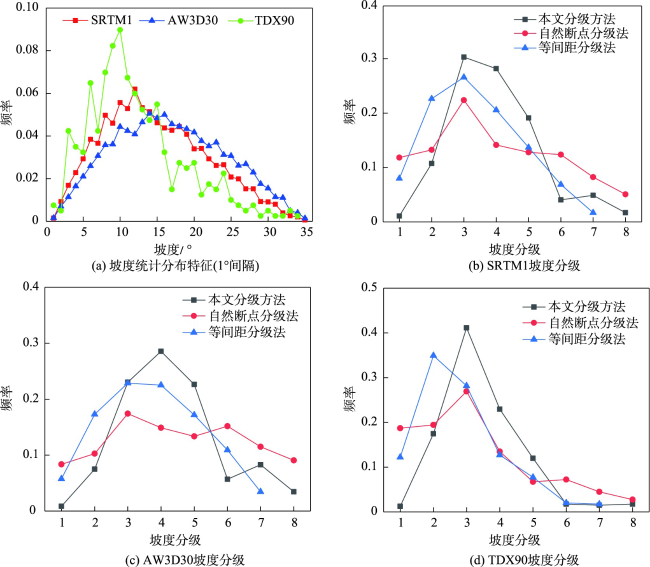
汤国安, 宋佳. 基于DEM坡度图制图中坡度分级方法的比较研究[J]. 水土保持学报, 2006, 20(2):157-160,192.
|
| [37] |
林荣福, 刘纪平, 徐胜华, 等. 随机森林赋权信息量的滑坡易发性评价方法[J]. 测绘科学, 2020, 45(12):131-138.
|
| [38] |
朱奇峰, 杨勤科, 师动, 等. 坡度分级方法对坡度制图的影响[J]. 水土保持通报, 2017, 37(3):314-320.
[
|
/
| 〈 |
|
〉 |
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}