
基于众源轨迹的OSM路网转向信息增强
|
陈欣(1995—),女,湖南怀化人,博士生,主要从事轨迹大数据挖掘研究。E-mial: cx_free342@whu.edu.cn |
收稿日期: 2023-02-16
修回日期: 2023-05-16
网络出版日期: 2023-09-22
基金资助
国家自然科学基金项目(41771474)
国家自然科学基金项目(42071432)
Turning Information Enhancement of OpenStreetMap Road Network Based on Crowdsourcing Trajectory Data
Received date: 2023-02-16
Revised date: 2023-05-16
Online published: 2023-09-22
Supported by
National Natural Science Foundation of China(41771474)
National Natural Science Foundation of China(42071432)
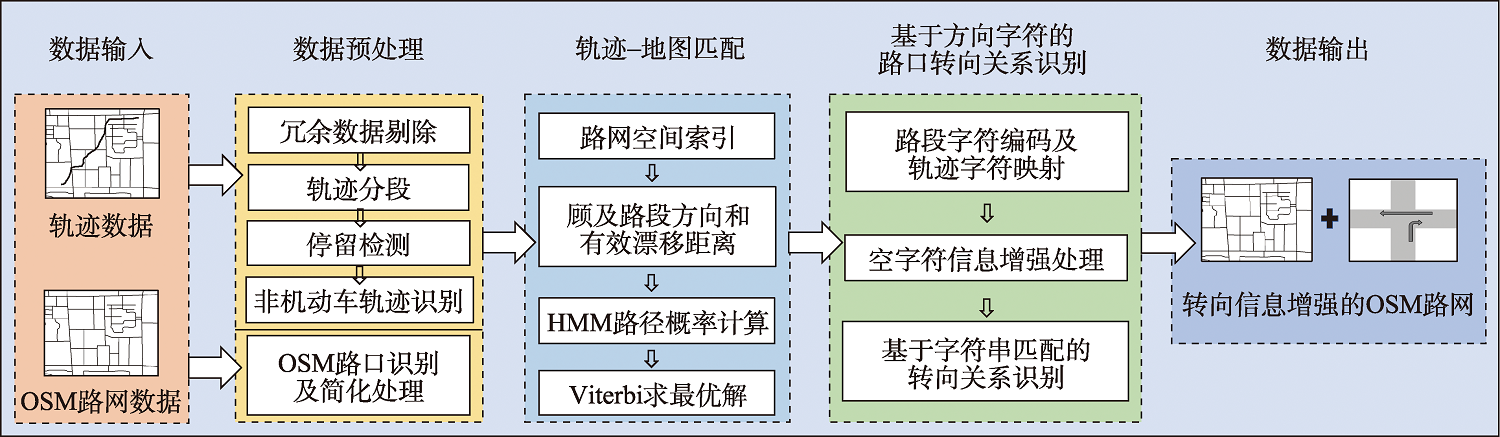
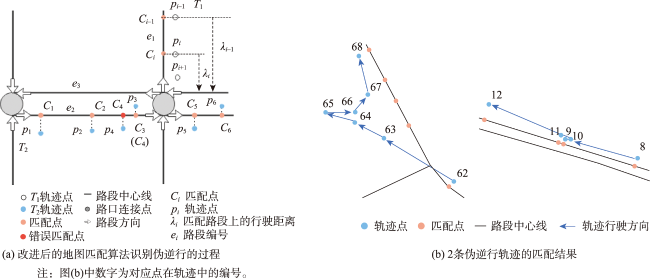
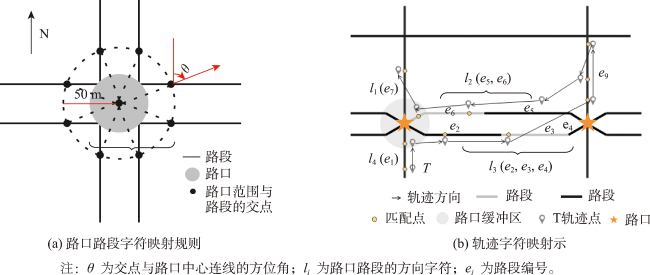
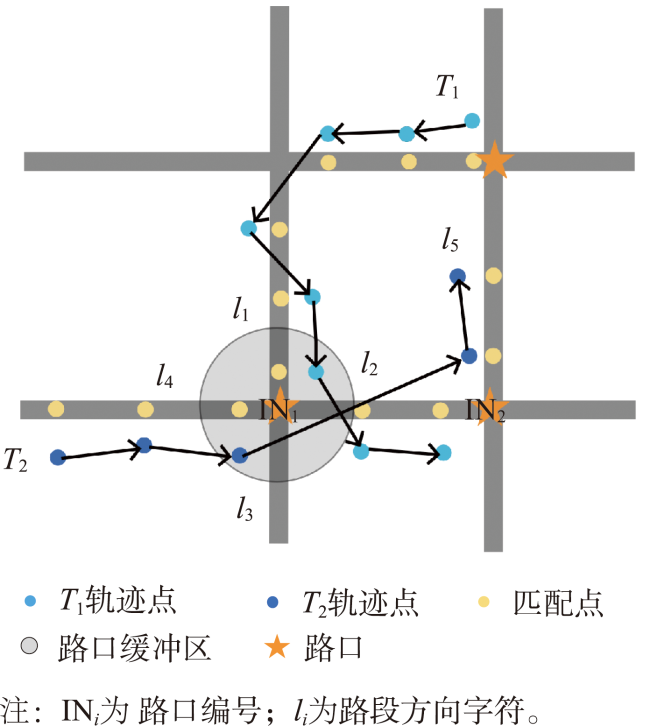
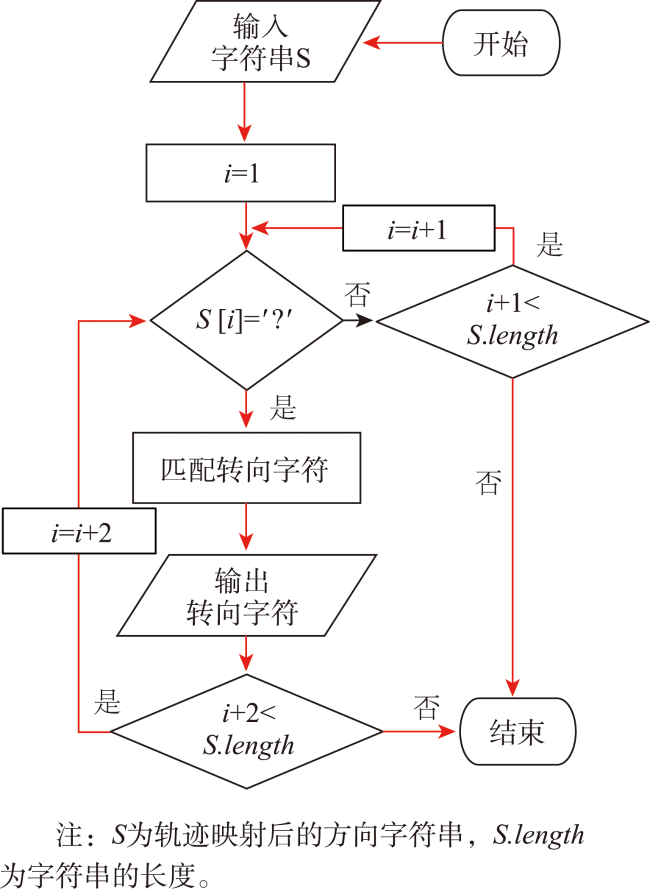
OpenStreetMap(OSM)路网数据是一个开放性的数据集,旨在为全球用户提供免费的数字地图资源,但路口转向信息的缺失,成为制约其进一步服务于车辆导航和路径规划的瓶颈。为此,本文提出一种基于地图匹配和字符串映射的路口转向探测方法,通过挖掘众源GNSS轨迹数据在交通路口的动态连接信息,为OSM路网结构赋予转向关系。首先,基于一种自上而下的四叉树分裂思想,设计了OSM路口结构探测方法,进而将路口结构简化为一个连接点;在此基础上改进HMM地图匹配算法,识别漂移异常的轨迹序列,从而将低频、高噪的众源轨迹投影到OSM路段上;接着,引入面向路口的路段字符编码技术,将路口相关的轨迹映射为转向过程中的方向字符串,进一步借助于最优路径分析思想,设计了空字符的信息增强处理方法还原低频轨迹行驶的路线信息,以有效提高短路段的轨迹支持度;最后,直接针对轨迹方向字符串,通过字符串匹配挖掘轨迹在目标路口的转向类别,实现OSM路网的转向信息增强。本文将复杂的路口转向关系识别转化为简单的字符串匹配,基于上海市数据的试验表明,该方法可以识别结构与大小各异的路口转向关系,其精确率达到90%,召回率超过98%,F1值超94%。
陈欣 , 向隆刚 , 焦凤伟 . 基于众源轨迹的OSM路网转向信息增强[J]. 地球信息科学学报, 2023 , 25(10) : 1954 -1967 . DOI: 10.12082/dqxxkx.2023.230070
OpenStreetMap (OSM) road network is an open-source dataset that is dedicated to providing people with a globe-free digital map resource, and it has been widely used in spatial analysis and applications such as route planning and vehicle navigation services. Meanwhile, in order to regulate traffic order and reduce heavy traffic congestion, the constraints of turning rules are generally implemented at intersections in urban areas. These constraints should be respected in the applications based on OSM road network. However, OSM road network lacks turning relationships at intersections, preventing its services from route planning and vehicle navigation. For this reason, to endow OSM road network structure with turning relationships, this study presents an intersection turning detection method based on map matching and string mapping, which takes advantage of crowdsourcing GNSS trajectory data in terms of its dynamic connection information at traffic intersections. Firstly, a structure detection method for OSM intersections is designed based on a top-down quadtree splitting idea, then the intersections with different sizes and complex and various shapes are reduced to the connection points. On this basis, the improved Hidden Markov Model (HMM) map matching algorithm is introduced to project low-frequency and high-noise trajectories onto OSM road segments. This algorithm considers the direction consistency between roads and trajectories, as well as the effective drift distance between two adjacent trajectory points, can identify trajectory sequences with semantic anomalies during the driving process. Secondly, to simplify turning relationship detection, a character encoding technology facing the intersection-related road segments is presented to map the trajectories crossing through intersections to the directional strings in turning process. The information enhancement method regarding the empty characters based on optimal path analysis is further designed to enhance turning trajectory support for short road segments. This approach helps restore the driving route information for low-frequency trajectories. Finally, the different turn modes of trajectories at the target intersection are mined by directly targeting the trajectory directional strings based on a string matching method, thus this study realizes turning information enhancement for OSM intersections referencing to the "consensus knowledge" of crowdsourcing trajectories. The complicated turning relationship identification for OSM intersections is transformed into the simple string matching. The experiment based on crowdsourcing trajectory data in Shanghai shows that the proposed method can detect turning relationships for OSM intersections with a precision rate of 90%, a recall rate of over 98%, and an F1-score of over 94%.
表1 路口的转向关系Tab.1 Turning relationships at intersections |
| 路口 | 路段字符表示 | 转向频率 | 转向属性 |
|---|---|---|---|
| , | ( ):0|…|( ):88|… | ( )=0|…|( )=1|… |
注:( )表示路口 中从路段 方向驶入路段 方向的一组转向关系。 |
| 算法1 空字符信息增强算法 |
|---|
| 输入: : 原始轨迹; : 路口; 输出: : 信息增强后的字符串; 1 //轨迹地图匹配,输出匹配序列 2 ← 3 //轨迹字符映射,输出字符串 4 5 //该字符串属于缺少驶离路口字符的类型 6 if contains “?” and “?” 右侧相邻为 “E” then 7 推测 路口 驶向路口 ; 8 if 连续经过的2个路口 和 相邻 then 9 //将方向字符 插入 “?” 和 “E” 之间,输出 10 11 end if 12 end if |
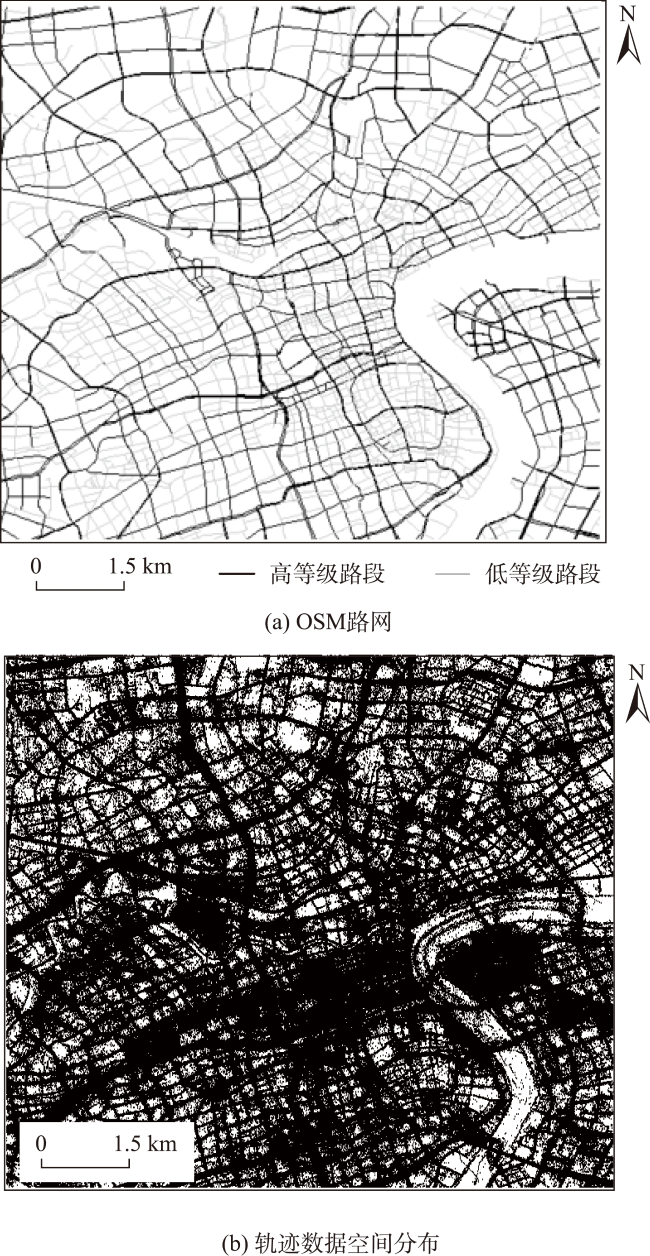
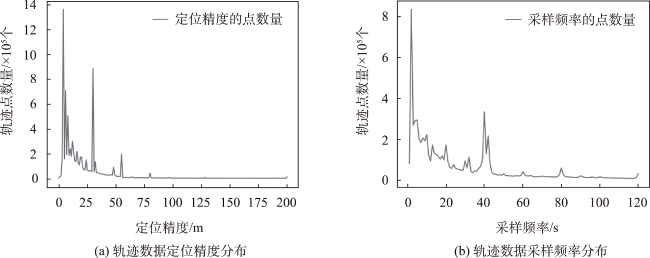
图8 试验区域的OSM路网及GNSS轨迹数据集示意Fig. 8 OSM road network and GNSS trajectories in the test area |
表2 不同方法的实验结果对比Tab. 2 Comparison of experimental results of different methods (%) |
| 方法 | Precision | Recall | F1-score |
|---|---|---|---|
| Efentakis | 89.75 | 73.86 | 81.03 |
| 本文方法 | 90.43 | 96.22 | 93.24 |
表3 不同转向的实验结果对比Tab. 3 Comparison of experimental results of different turning relationship classes (%) |
| 转向 | Precision | Recall | F1-score |
|---|---|---|---|
| 左转 | 94.12 | 91.43 | 92.76 |
| 右转 | 89.74 | 92.10 | 90.90 |
| 直行 | 100.00 | 100.00 | 100.00 |
| 掉头 | 80.00 | 77.41 | 75.73 |
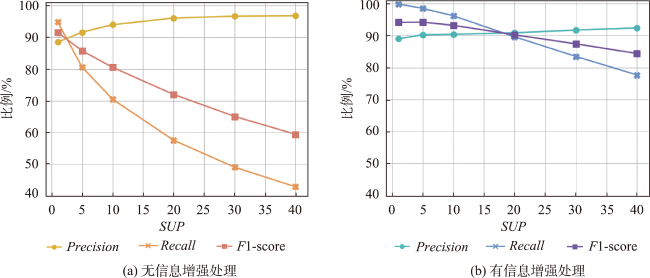
表4 不同参数的实验结果对比Tab. 4 Comparison of experimental results based on different parameters (%) |
| 方法 | 评价指标 | 支持度阈值SUP | |||||
|---|---|---|---|---|---|---|---|
| 1 | 5 | 10 | 20 | 30 | 40 | ||
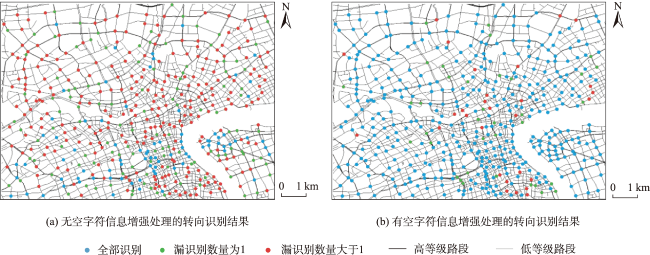
| 无信息 增强处理 | Precision | 88.51 | 91.64 | 94.01 | 96.11 | 96.68 | 96.83 |
| Recall | 94.91 | 80.64 | 70.48 | 57.57 | 49.05 | 42.86 | |
| F1-score | 91.60 | 85.79 | 80.56 | 72.01 | 65.08 | 59.42 | |
| 有信息 增强处理 | Precision | 89.02 | 90.29 | 90.43 | 90.90 | 91.73 | 92.43 |
| Recall | 99.91 | 98.53 | 96.22 | 89.64 | 83.51 | 77.69 | |
| F1-score | 94.15 | 94.23 | 93.24 | 90.27 | 87.43 | 84.42 | |
感谢武汉大学-华为空间信息技术创新实验室对本文提供资助。
| [1] |
|
| [2] |
|
| [3] |
陈舒燕. 基于OpenStreetMap的出行可达性分析与实现[D]. 上海: 上海师范大学, 2010.
[
|
| [4] |
寇培颖, 牛铮, 刘正佳, 等. 基于自发地理信息的“一带一路”区域陆路交通状况分析[J]. 地球信息科学学报, 2018, 20(8):1074-1082.
[
|
| [5] |
|
| [6] |
张绛丽, 张笑非, 徐丹, 等. 基于OpenStreetMap的智能交通路网数据的构建[J]. 道路交通与安全, 2014, 14(1):41-47.
[
|
| [7] |
庄立坚, 何兆成, 杨文臣, 等. 基于大规模浮动车数据的交叉口转向规则自动提取算法[J]. 武汉理工大学学报(交通科学与工程版), 2013, 37(5):1084-1088.
[
|
| [8] |
黄敏, 潘嘉杰, 刘芳. 基于SVM的交叉口连通关系建模[J]. 计算机工程与设计, 2017, 38(5):1319-1323.
[
|
| [9] |
段莉琼, 雷大伟. 车辆自导航系统中加入道路转向限制的最短路径算法[J]. 海洋测绘, 2003, 23(5):12-15.
[
|
| [10] |
隋东, 任刚, 邵进达. 基于GIS的城市交通网络数据模型研究[J]. 公路交通科技, 2006, 23(9):94-97.
[
|
| [11] |
|
| [12] |
|
| [13] |
孙智文. 基于航拍影像的道路附属设施检测技术研究[D]. 西安: 西安电子科技大学, 2018.
[
|
| [14] |
陈兴华, 万幼川, 王晓华. 基于街景影像的交通标志识别[J]. 地理空间信息, 2014, 12(5):75-77,10.
[
|
| [15] |
|
| [16] |
|
| [17] |
唐炉亮, 牛乐, 杨雪, 等. 利用轨迹大数据进行城市道路交叉口识别及结构提取[J]. 测绘学报, 2017, 46(6):770-779.
[
|
| [18] |
|
| [19] |
唐炉亮, 于智伟, 任畅, 等. 基于车载GPS轨迹的立体交叉口空间结构信息获取方法[J]. 交通运输工程学报, 2019, 19(5):170-179.
[
|
| [20] |
|
| [21] |
|
| [22] |
|
| [23] |
向隆刚, 邵晓天. 载体轨迹停留信息提取的核密度法及其可视化[J]. 测绘学报, 2016, 45(9):1122-1131.
[
|
| [24] |
徐倩. GB 17761-2018《电动自行车安全技术规范》解读[J]. 中国质量技术监督, 2019(3):61-63.
[
|
| [25] |
|
| [26] |
张彩丽, 向隆刚, 李雅丽, 等. 基于出租车轨迹的可导航路网构建[J]. 测绘学报, 2021, 50(12):1650-1662.
[
|
| [27] |
李航. 统计学习方法[M]. 北京: 清华大学出版社, 2012.
[
|
| [28] |
|
| [29] |
|
| [30] |
李军, 游弋, 邓红平. 城市浮动车数据定位误差分布规律研究[J]. 科学技术与工程, 2016, 16(1):244-249.
[
|
/
| 〈 |
|
〉 |


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}