×
模态框(Modal)标题
在这里添加一些文本
Close
Close
Submit
Cancel
Confirm
×
模态框(Modal)标题
×
Journal
Article
Figure
Search
EN
中文
Home
About Journal
Overview
Indexing
Awards
Editorial Board
Guide for Authors
Editorial Policies
Subscription
Contact Us
EN
中文
Figure/Table detail
Cross-source Point Cloud Registration Method Based on Line-Planar Feature Constraints
LI Huarong, MAO Hongyu, ZHAO Yi, BI Ailin, CHEN Tuan, XIN Wei, ZHONG Tao
Journal of Geo-information Science
, 2024, 26(
5
): 1180-1192. DOI:
10.12082/dqxxkx.2024.230653
配准过程
变换参数
配准结果
旋转矩阵
平移参数
尺度因子
粗配准
31.572
-
40.537
-
0.724
40.535
32.579
-
0.467
0.818
-
0.271
51.999
627 406.300
3 257 184.000
536.443
52.006
精配准
1.000
-
0.021
0.000
0.021
1.000
-
0.003
0.000
0.003
1.000
4.770
0.718
-0.472
1
Tab. 4
Registration results of multiple building groups in large area
Other figure/table from this article
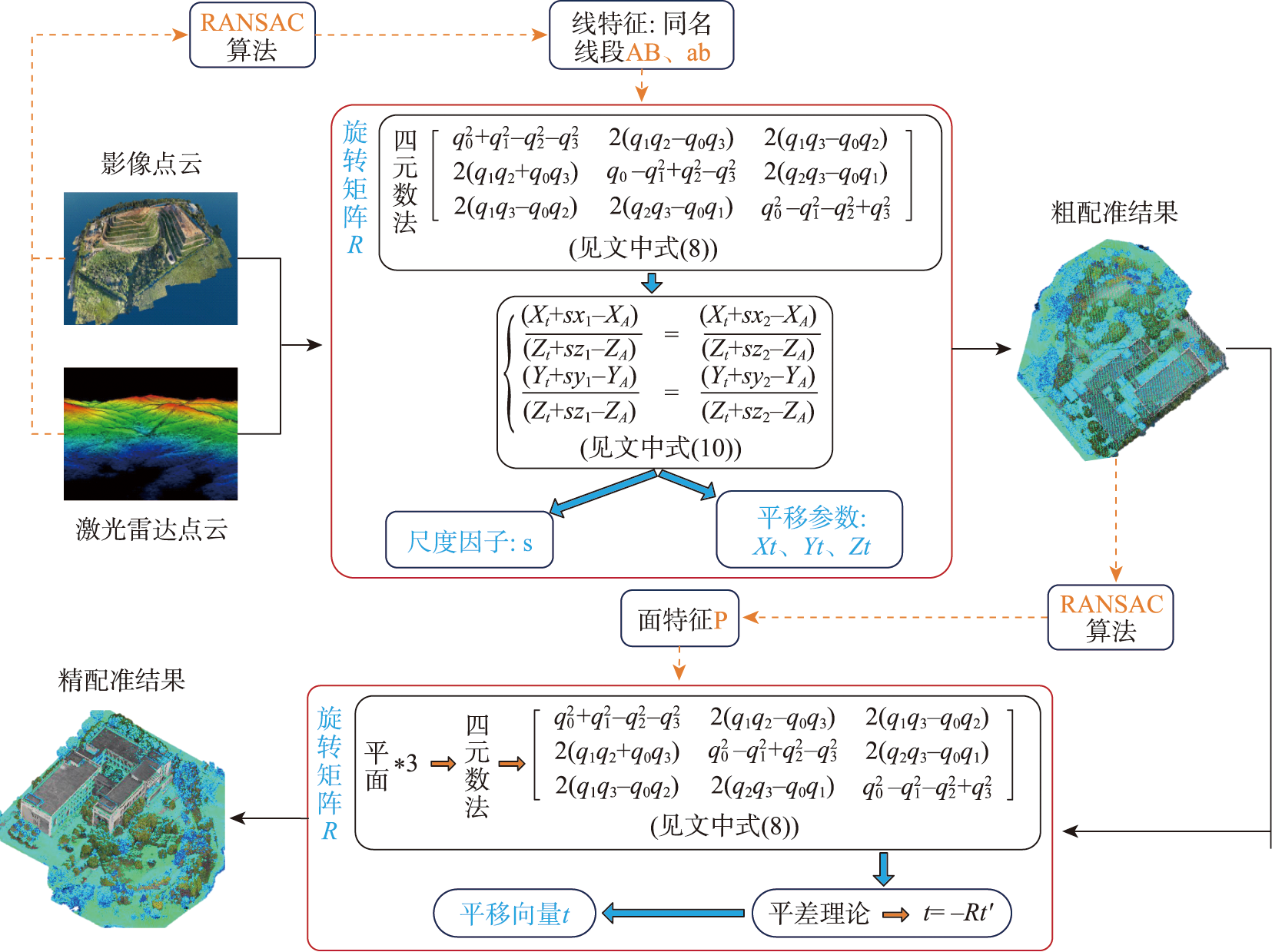
Fig. 1
Flowchart of cross-source point cloud registration based on line-planar feature constraints
Fig. 2
Point cloud data and homonymous line feature
Tab. 1
Endpoint data of homonymous lines
Tab. 2
Registration transformation calculation result
Fig. 3
Point cloud registration results
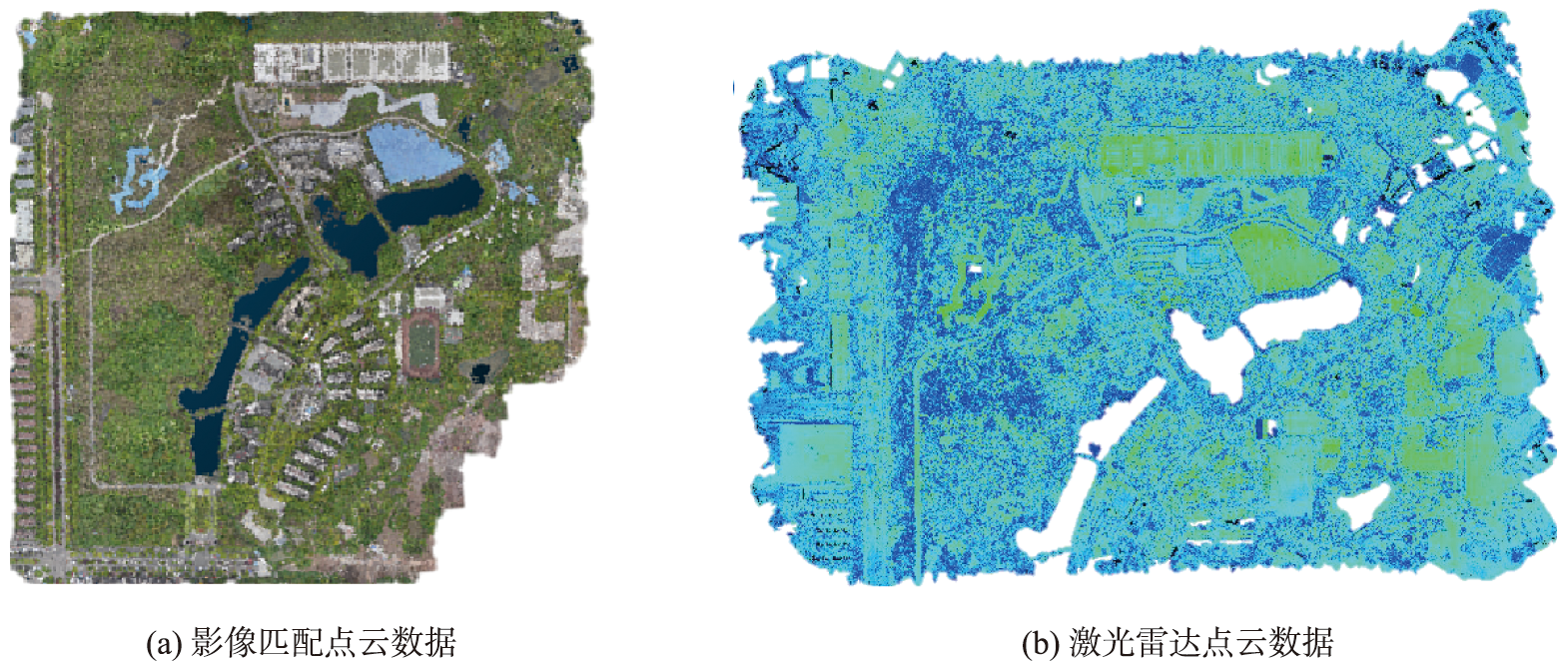
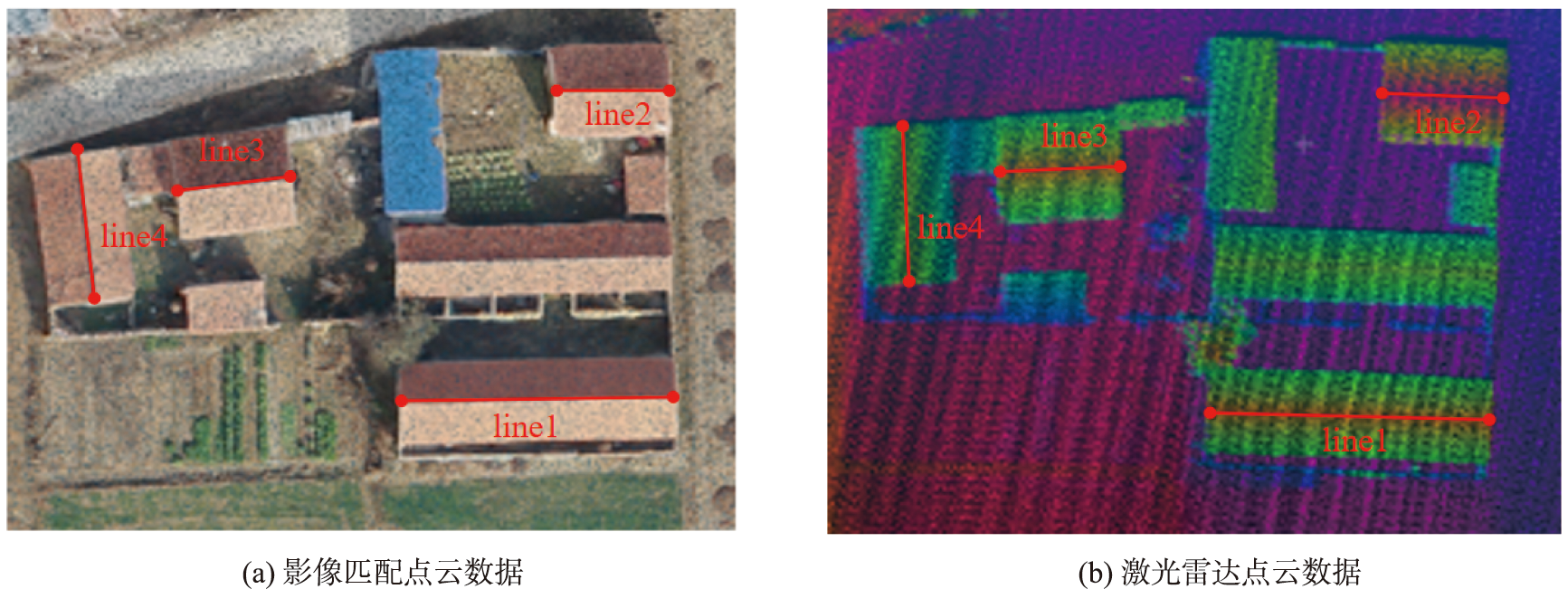
Fig. 4
Cross-source point cloud experimental data
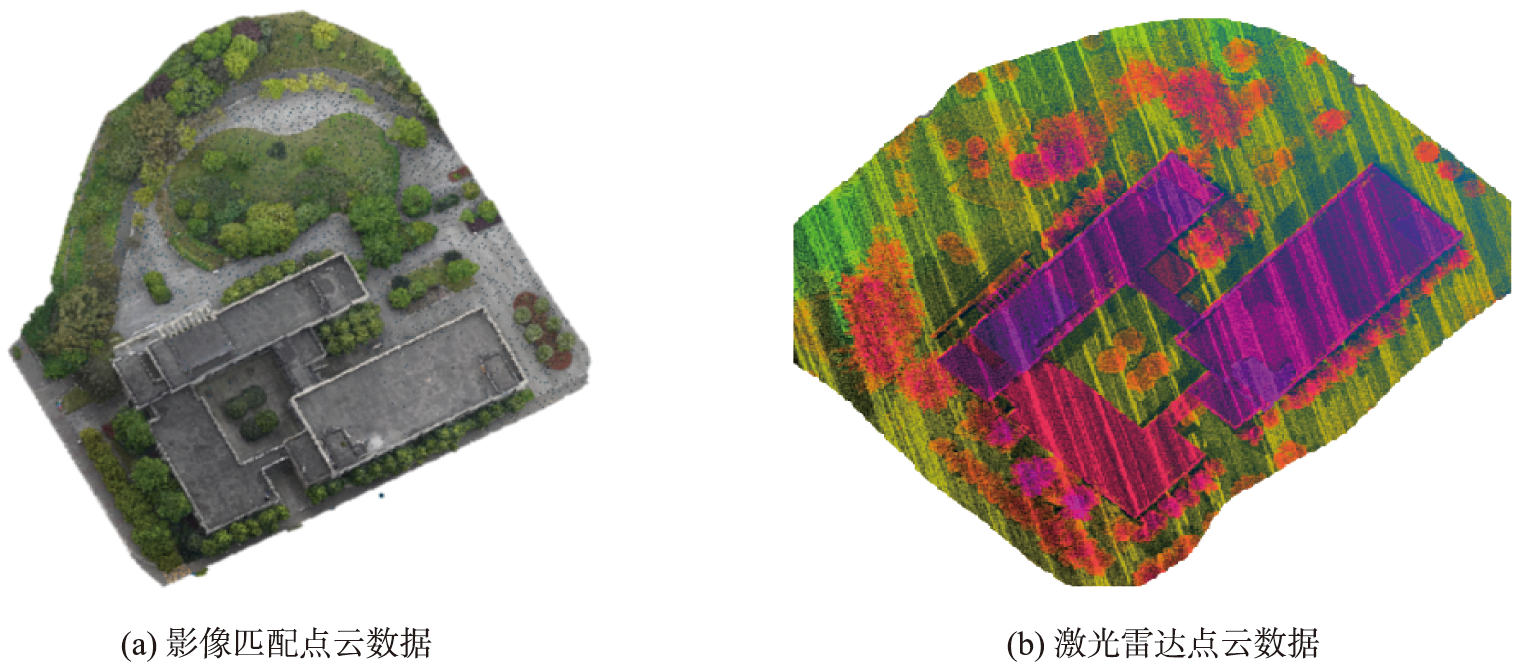
Fig. 5
Experimental data for individual buildings in small area
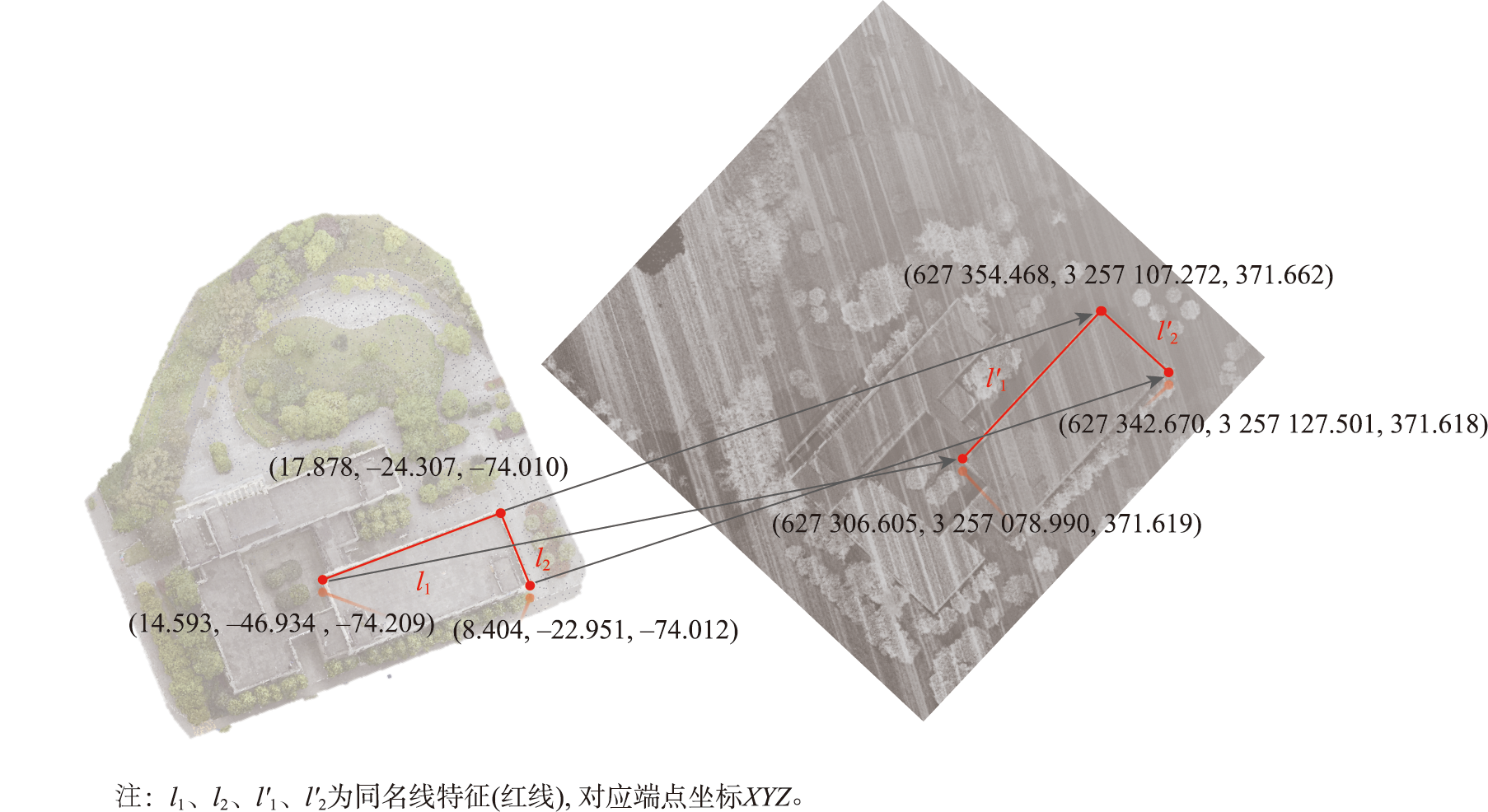
Fig. 6
Homonymous line registration data
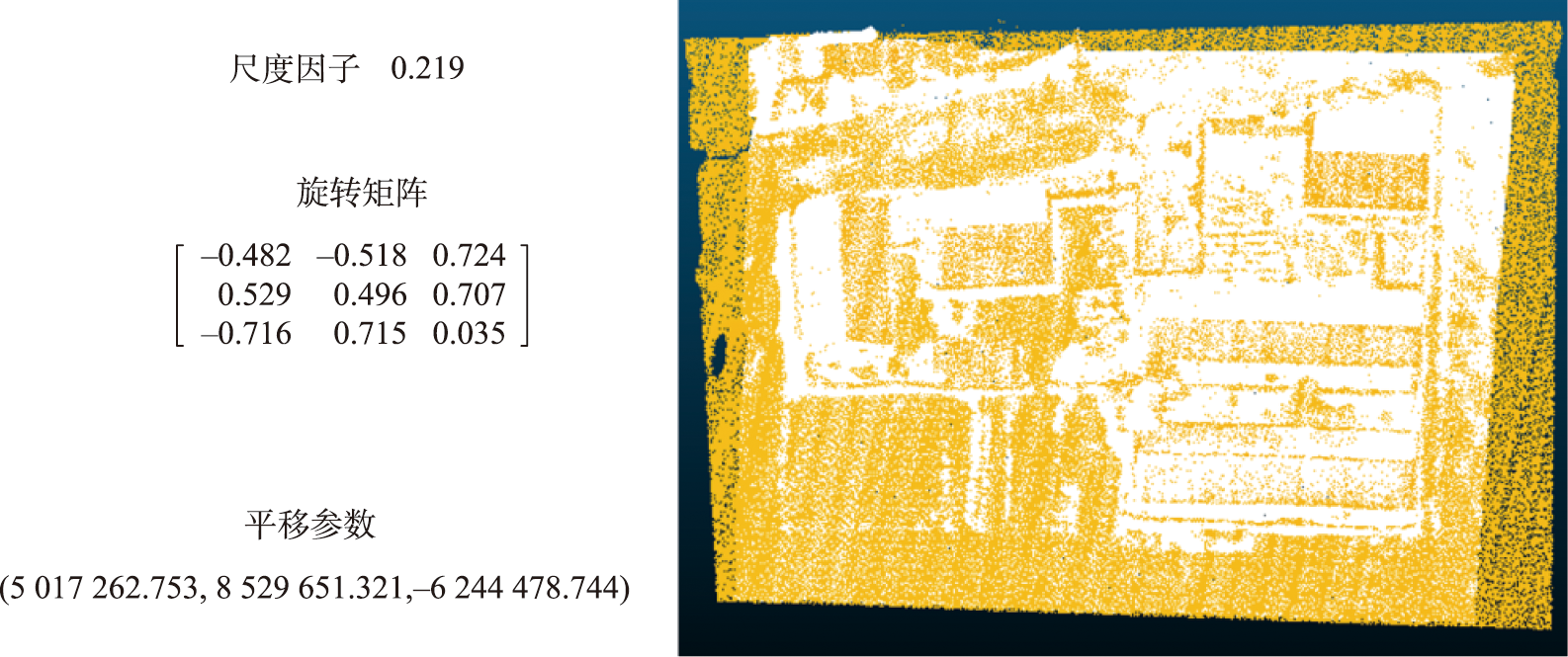
Fig. 7
Transformation parameters and registration results of coarse registration
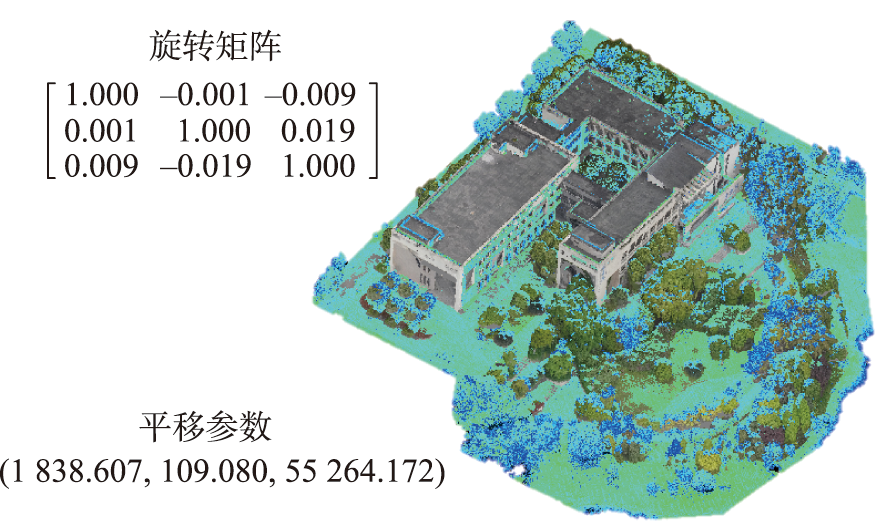
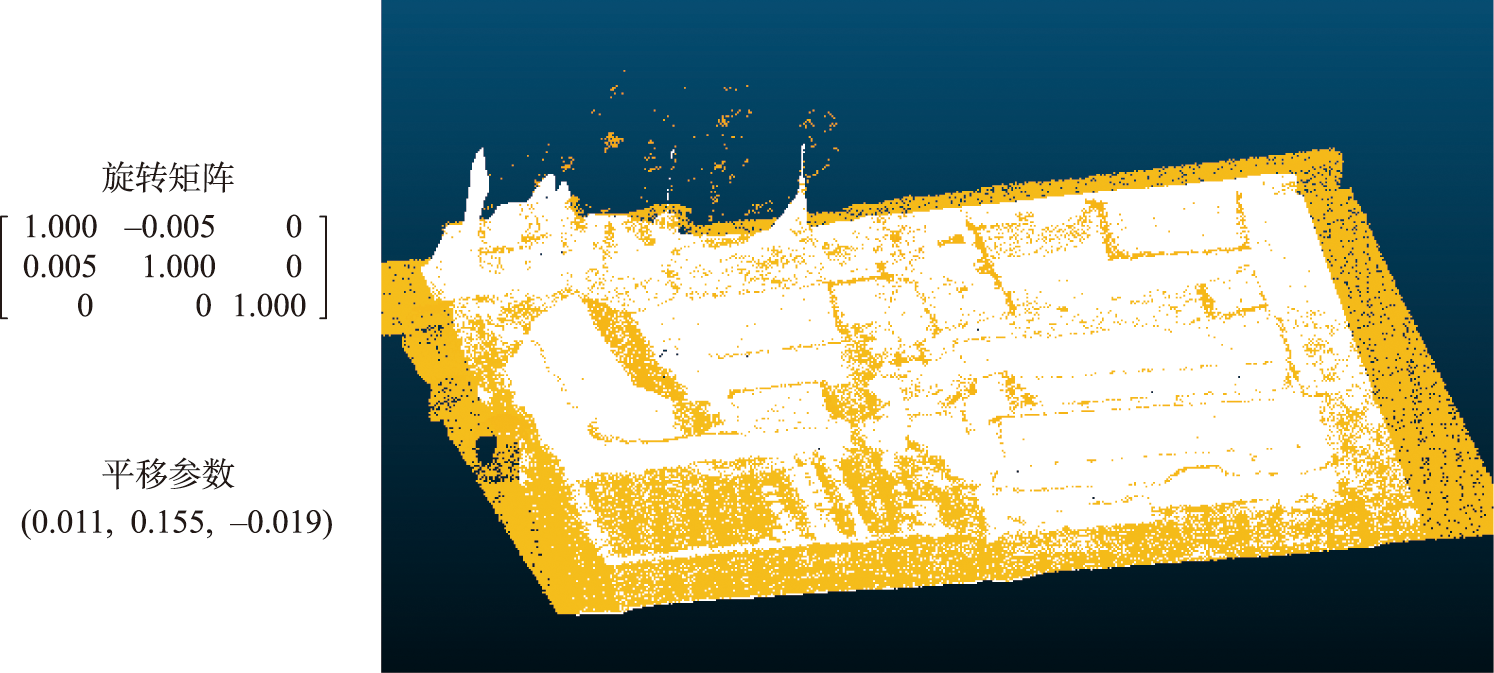
Fig. 8
Transformation parameters and registration results of fine registration
Fig. 9
Experimental data for small-area multi-building complexes
Tab. 3
Registration data of the same name line in a small area
Fig. 10
Coarse alignment results
Fig. 11
Precise matching of results
Tab. 5
RMSE calculated by each algorithm in different scenarios
Tab. 6
The angle between planes and the distance between the center point and the plane