×
模态框(Modal)标题
在这里添加一些文本
Close
Close
Submit
Cancel
Confirm
×
模态框(Modal)标题
×
Journal
Article
Figure
Search
EN
中文
Home
About Journal
Overview
Indexing
Awards
Editorial Board
Guide for Authors
Editorial Policies
Subscription
Contact Us
EN
中文
Figure/Table detail
Recognition of UWB NLOS in LiDAR Point Clouds and Indoor Fusion Positioning Algorithm
SUI Xin, MA Haonan, WANG Changqiang, CHEN Zhijian, SHI Zhengxu, GAO Jiaxin
Journal of Geo-information Science
, 2024, 26(
12
): 2686-2700. DOI:
10.12082/dqxxkx.2024.240442
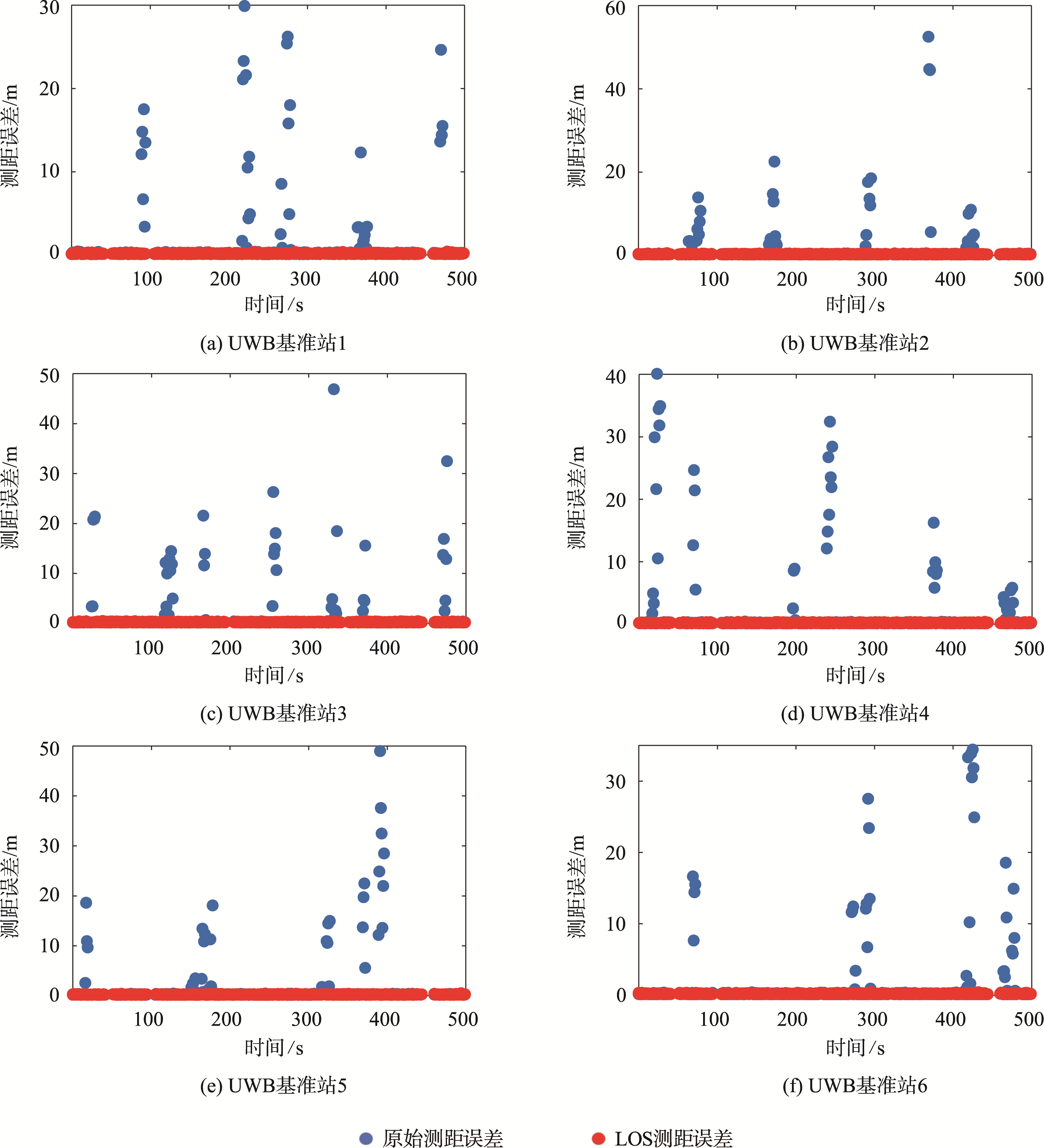
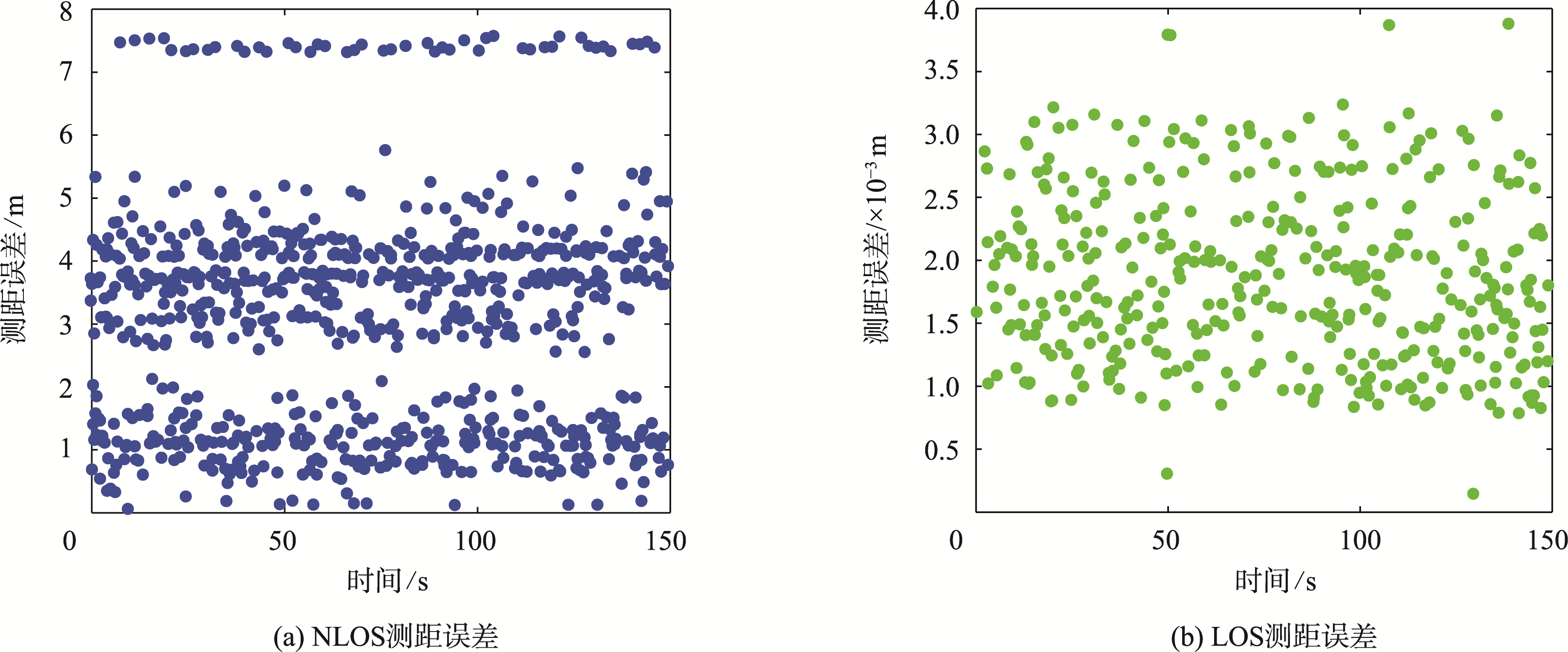
Fig. 9
UWB base station original ranging errors and LOS ranging errors
Other figure/table from this article
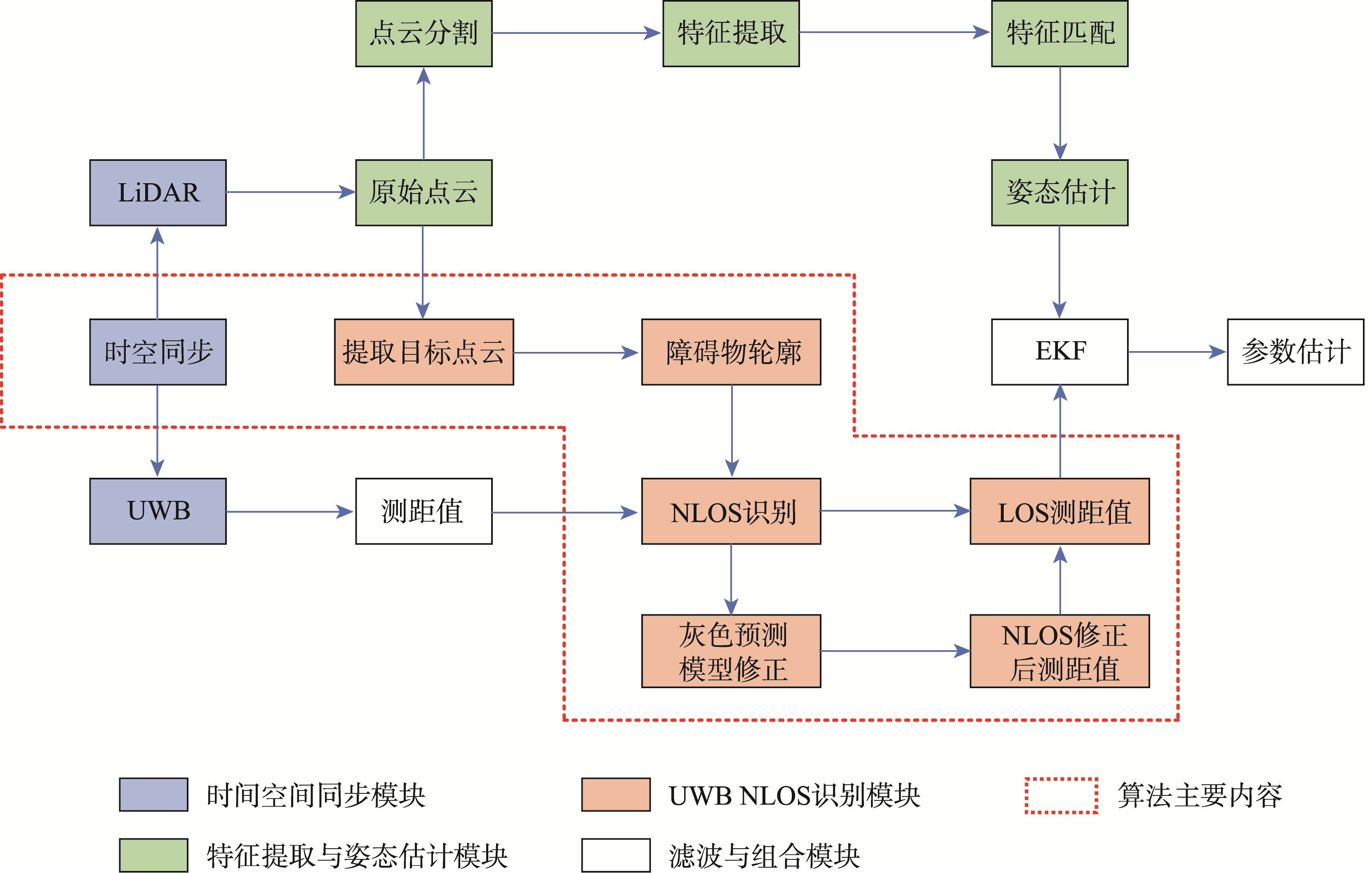
Fig. 1
Combined positioning system for UWB NLOS identification based on LiDAR point clouds
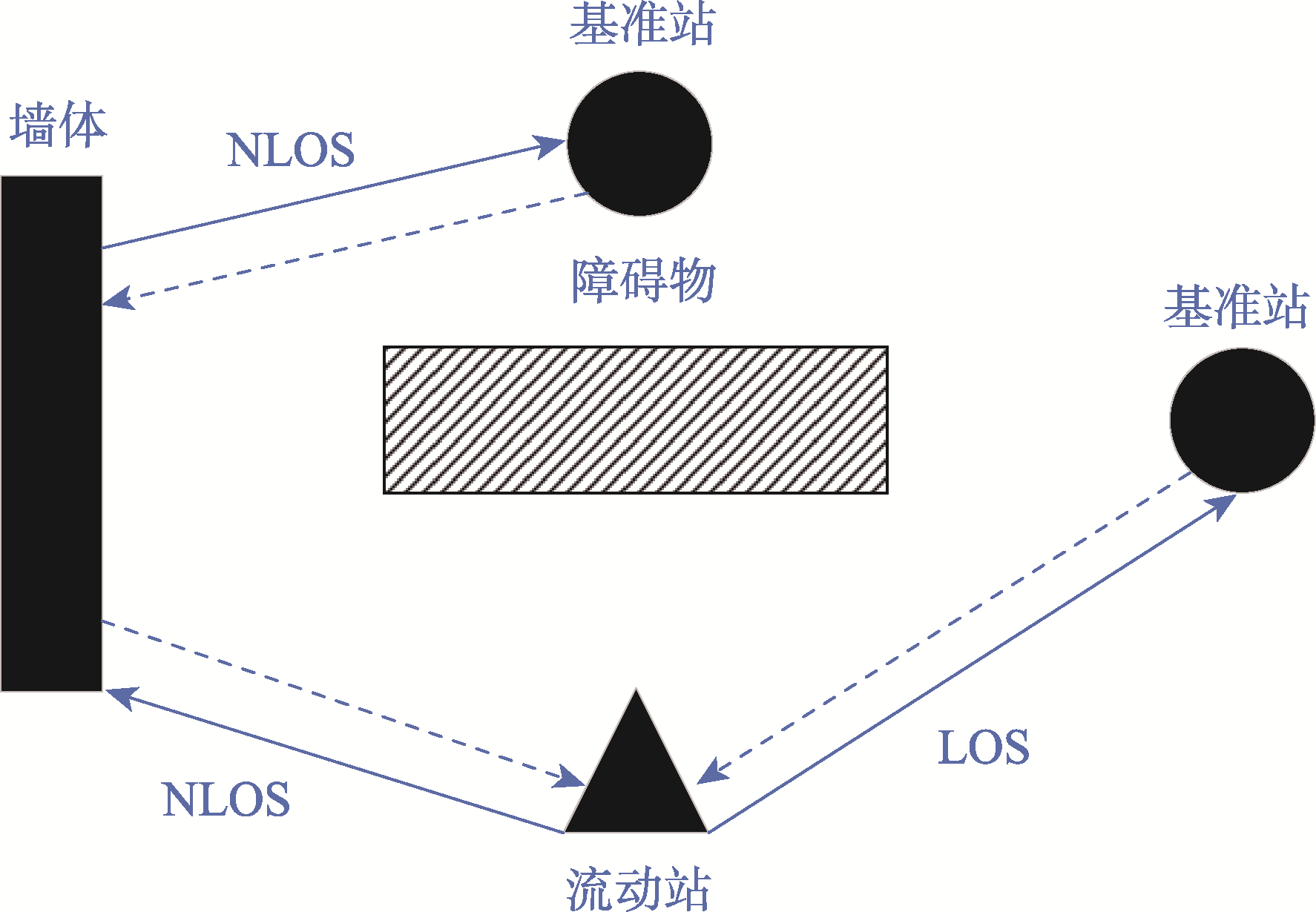
Fig. 2
Schematic diagram of indoor NLOS and LOS propagation
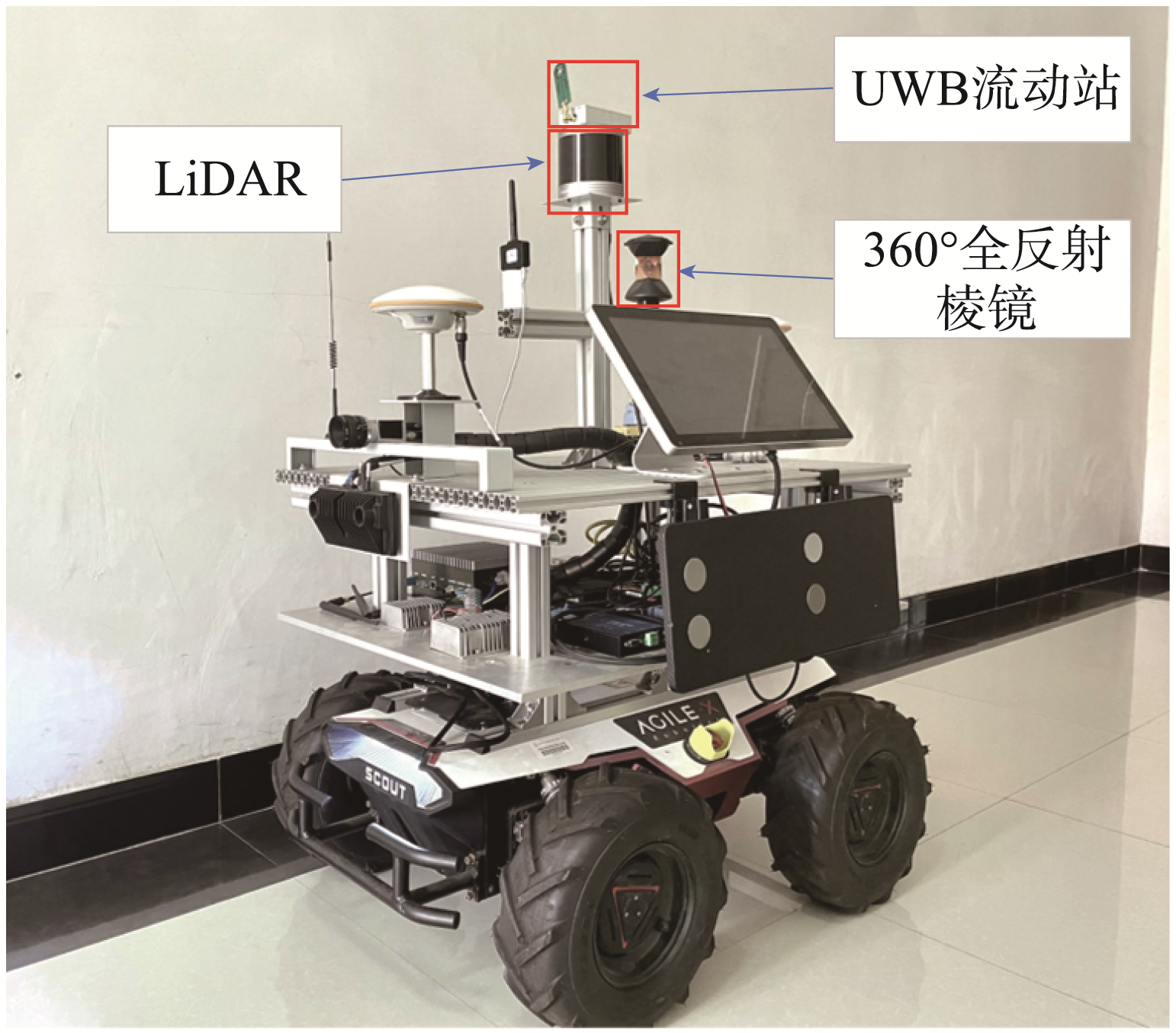
Fig. 3
Fusion positioning experimental platform
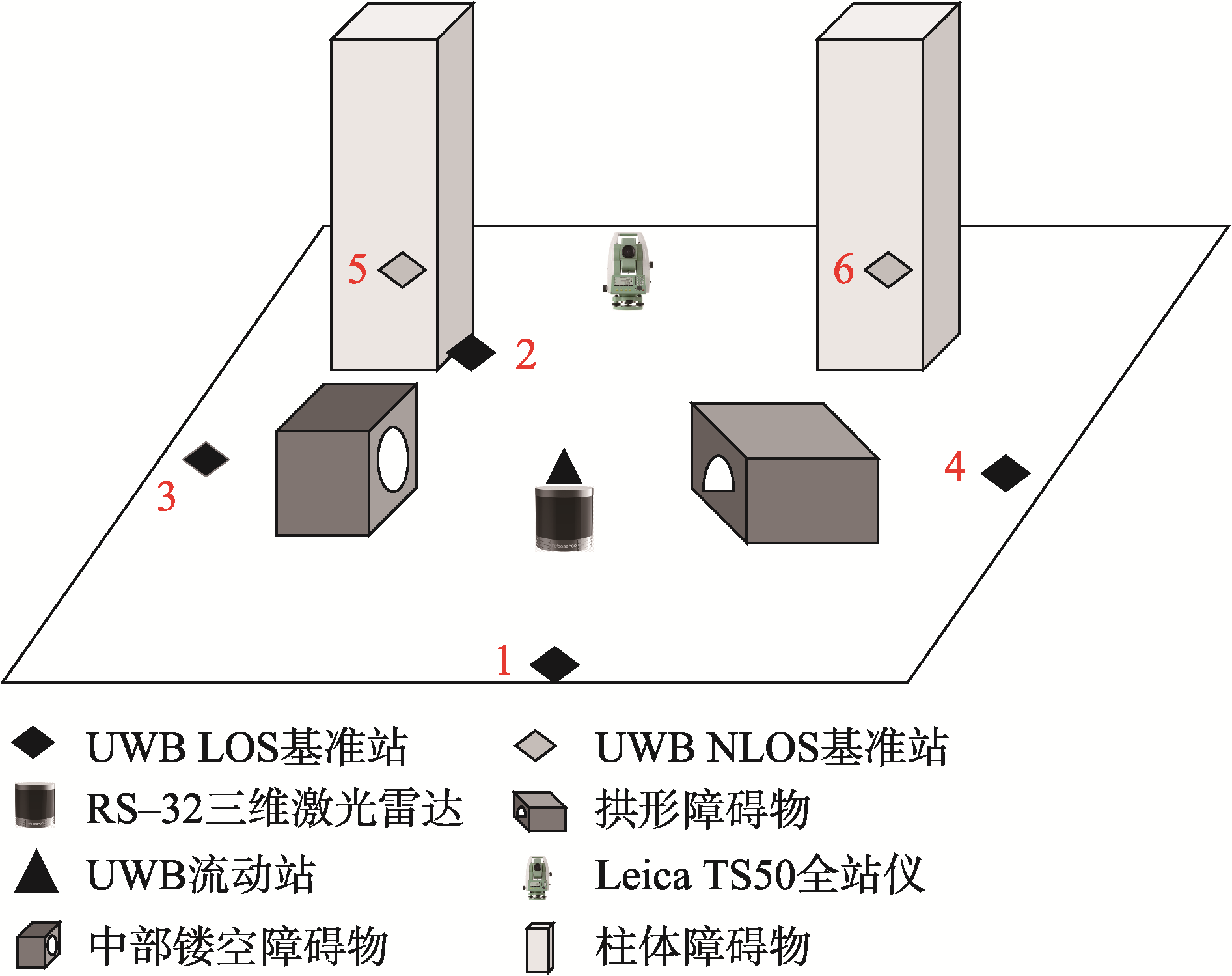
Fig. 4
Static experiment scene diagram
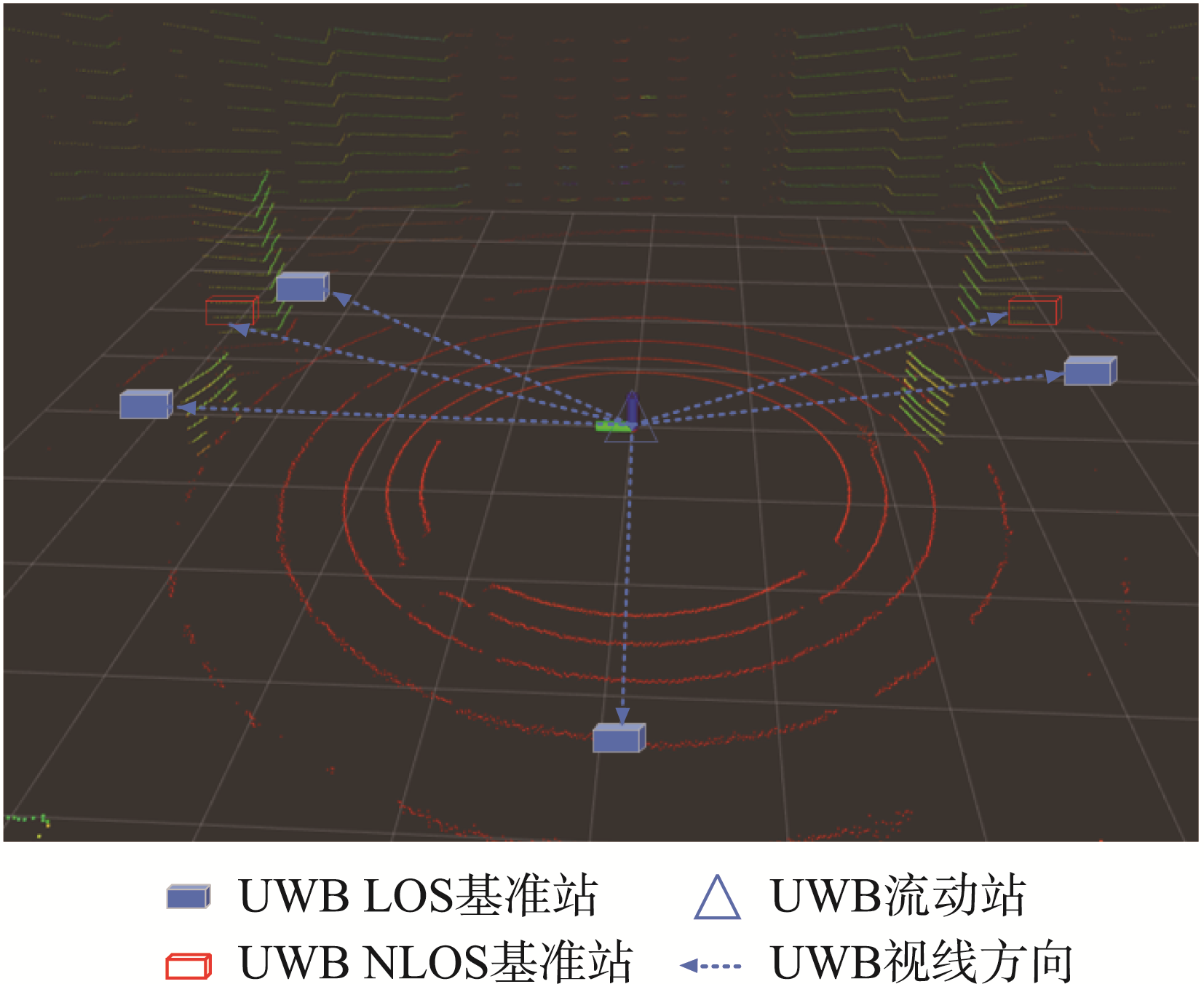
Fig. 5
3D Point cloud view
Fig. 6
Comparison of ranging errors in NLOS and LOS scenarios during static experiment
Tab. 1
Number of NLOS base stations identified by different algorithms (个)
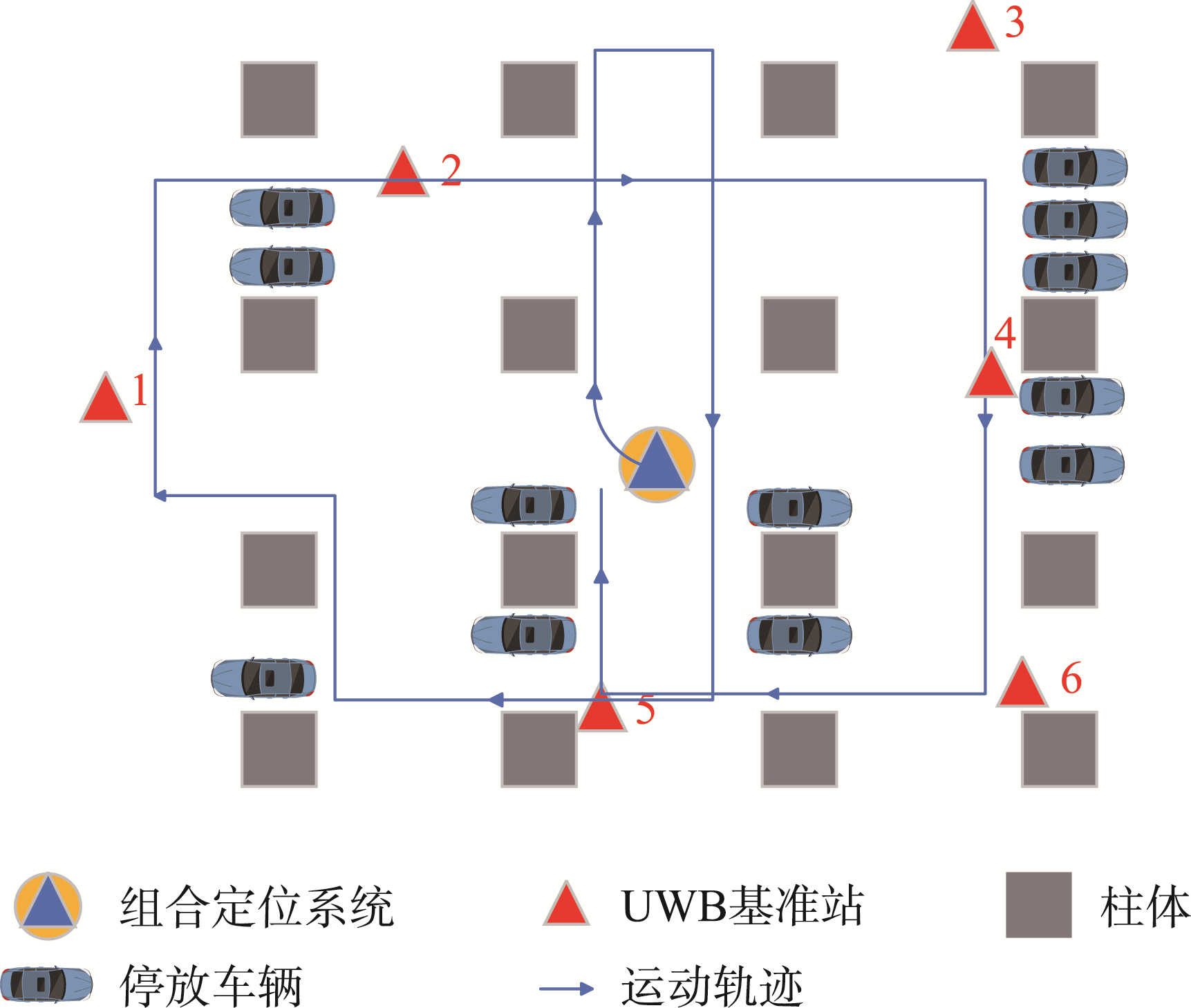
Fig. 7
Experimental layout of the underground parking lot
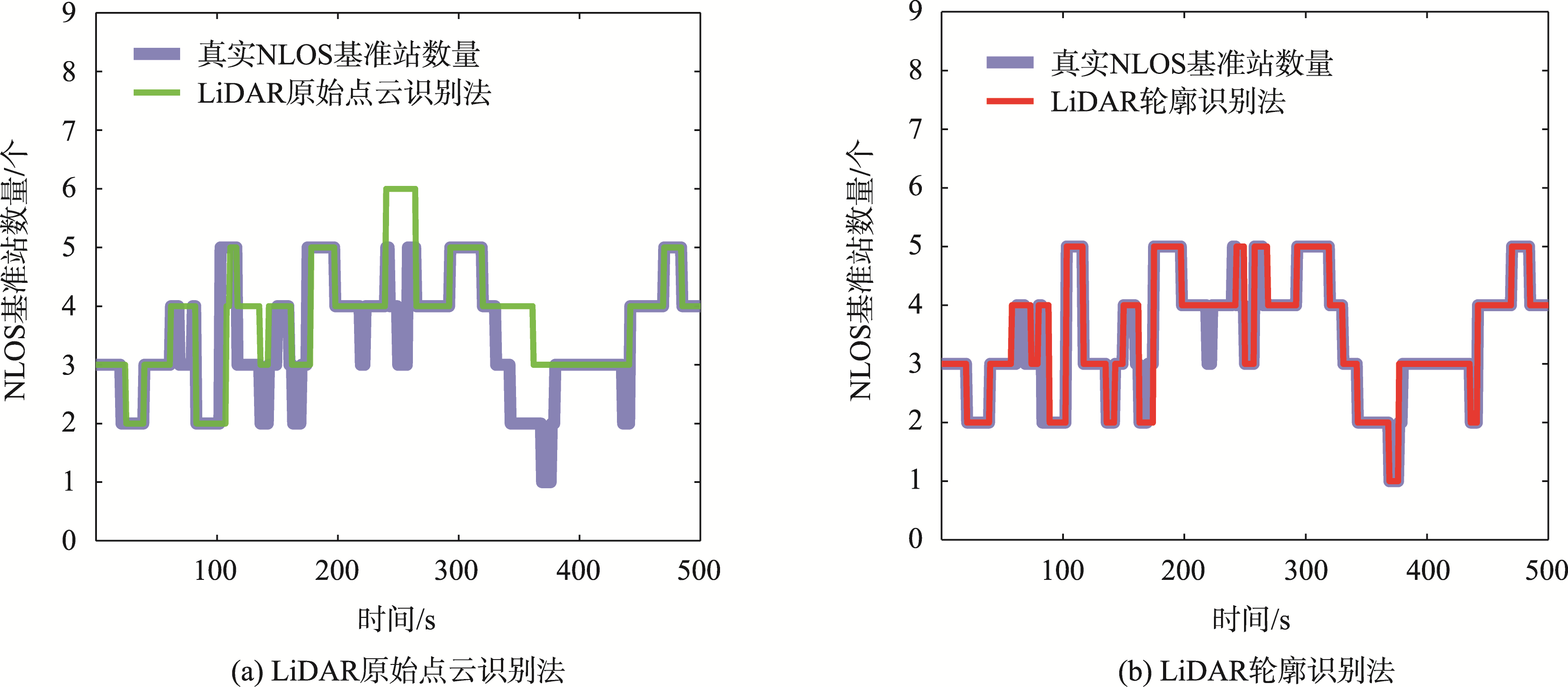
Fig. 8
Comparison of the number of NLOS reference stations identified by dynamic recognition algorithms
表2
不同基准站的原始测距值和LOS测距值的测距误差
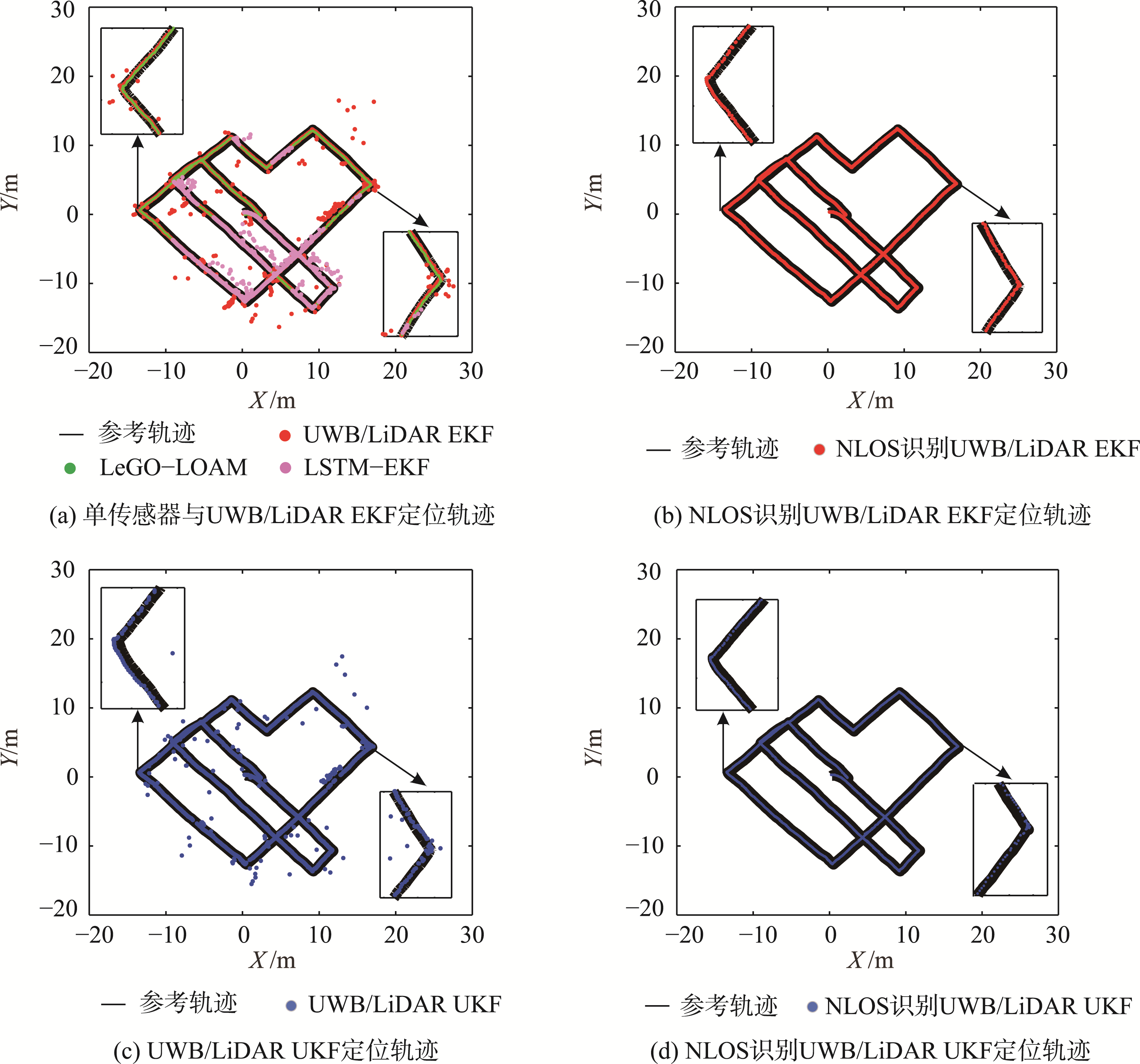
Fig. 10
Comparison of positioning trajectories using different algorithms
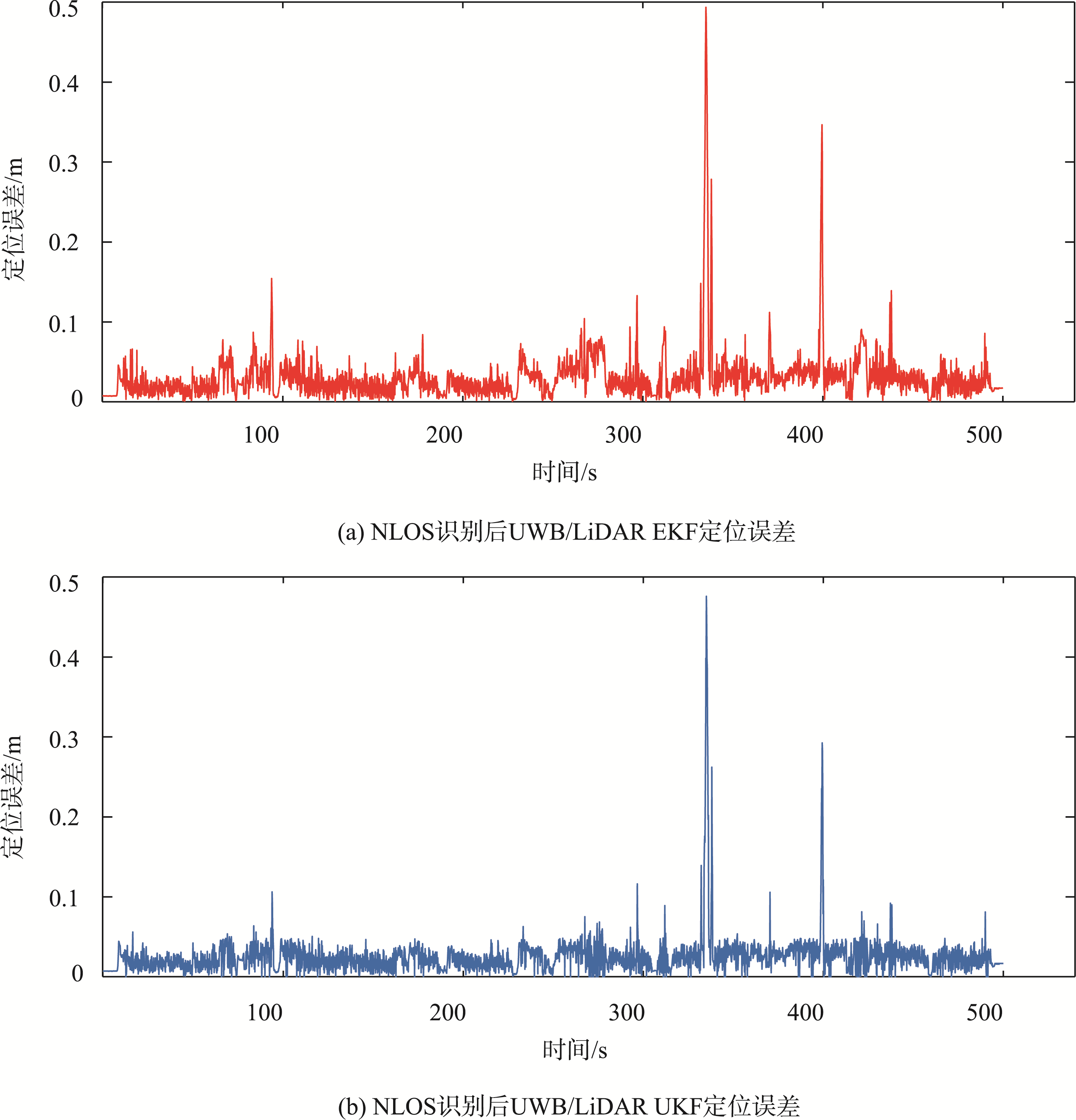
Fig. 11
Positioning errors of UWB/LiDAR fusion after NLOS identification
Tab. 3
Precision comparison between LeGO-LOAM and five LiDAR/UWB fusion-based positioning algorithms before and after NLOS identification (m)