×
模态框(Modal)标题
在这里添加一些文本
Close
Close
Submit
Cancel
Confirm
×
模态框(Modal)标题
×
Journal
Article
Figure
Search
EN
中文
Home
About Journal
Overview
Indexing
Awards
Editorial Board
Guide for Authors
Editorial Policies
Subscription
Contact Us
EN
中文
Figure/Table detail
Recognition of UWB NLOS in LiDAR Point Clouds and Indoor Fusion Positioning Algorithm
SUI Xin, MA Haonan, WANG Changqiang, CHEN Zhijian, SHI Zhengxu, GAO Jiaxin
Journal of Geo-information Science
, 2024, 26(
12
): 2686-2700. DOI:
10.12082/dqxxkx.2024.240442
测量值
误差对比
基准站1
基准站2
基准站3
基准站4
基准站5
基准站6
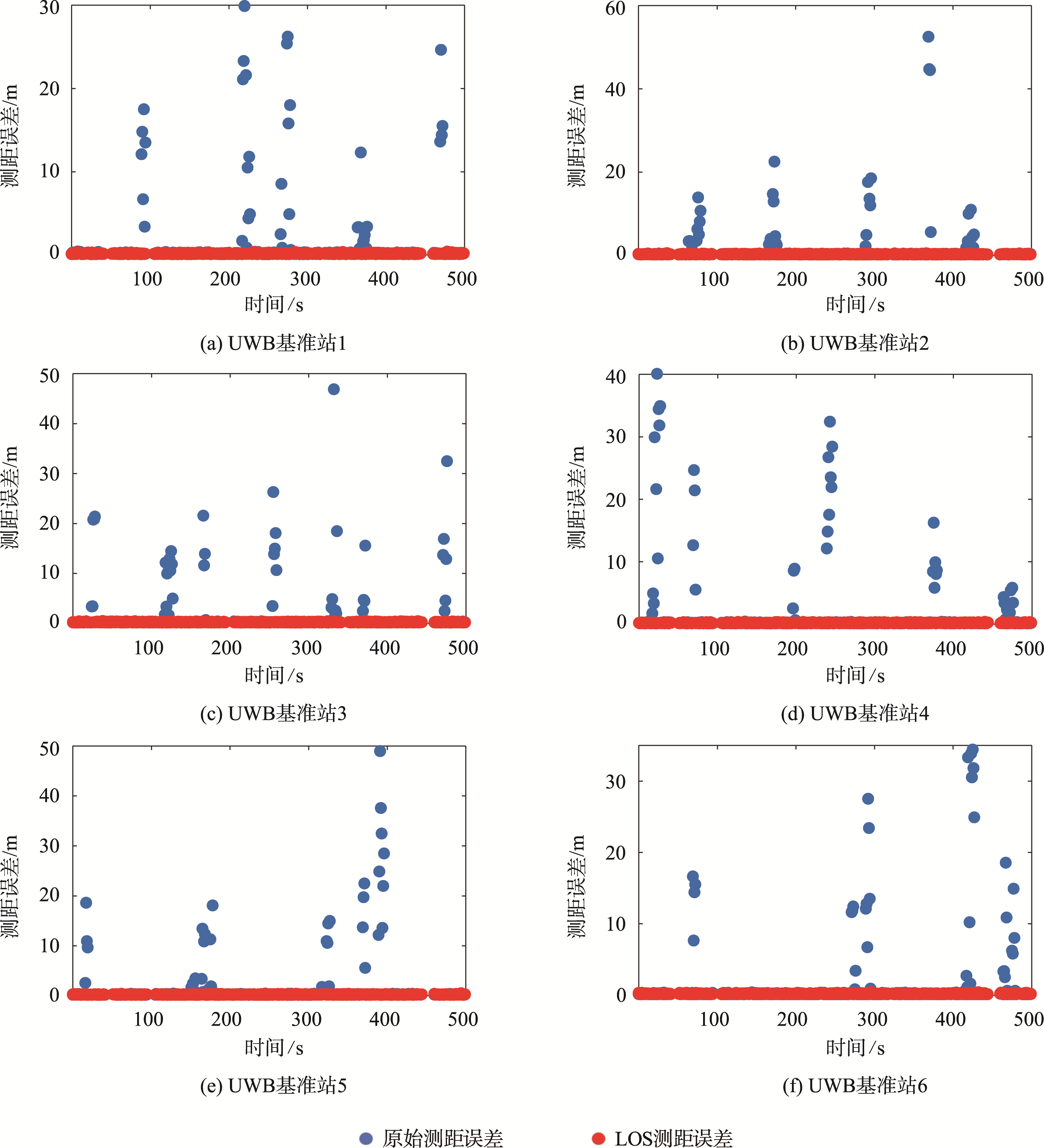
原始测量值
RMSE
2.642
1.734
1.695
1.638
1.246
2.284
MAX
29.972
52.304
46.728
39.960
48.853
31.629
LOS测量值
RMSE
0.068
0.085
0.097
0.080
0.079
0.062
MAX
0.604
0.936
0.747
0.831
0.639
0.908
表2
不同基准站的原始测距值和LOS测距值的测距误差
Other figure/table from this article
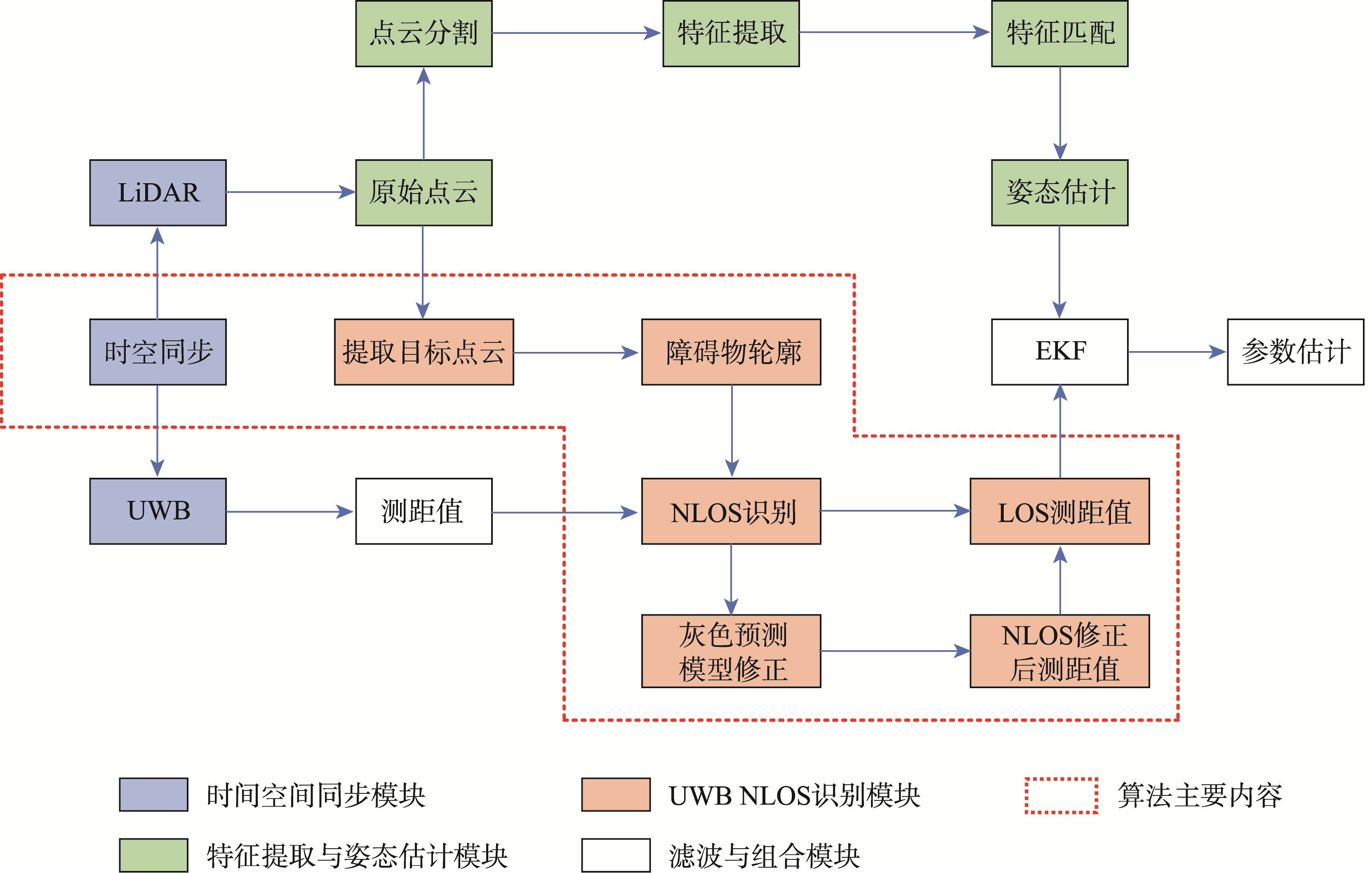
Fig. 1
Combined positioning system for UWB NLOS identification based on LiDAR point clouds
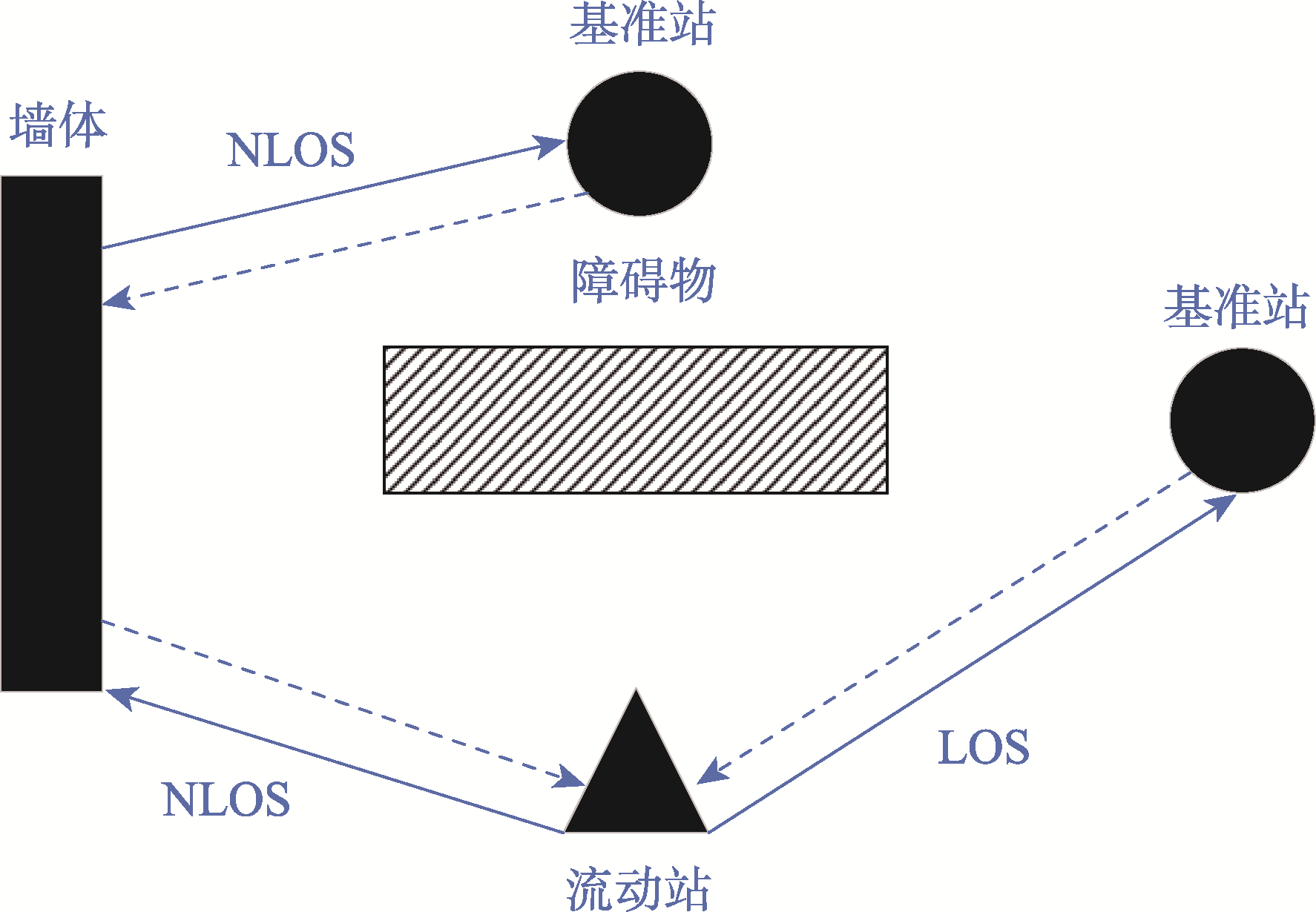
Fig. 2
Schematic diagram of indoor NLOS and LOS propagation
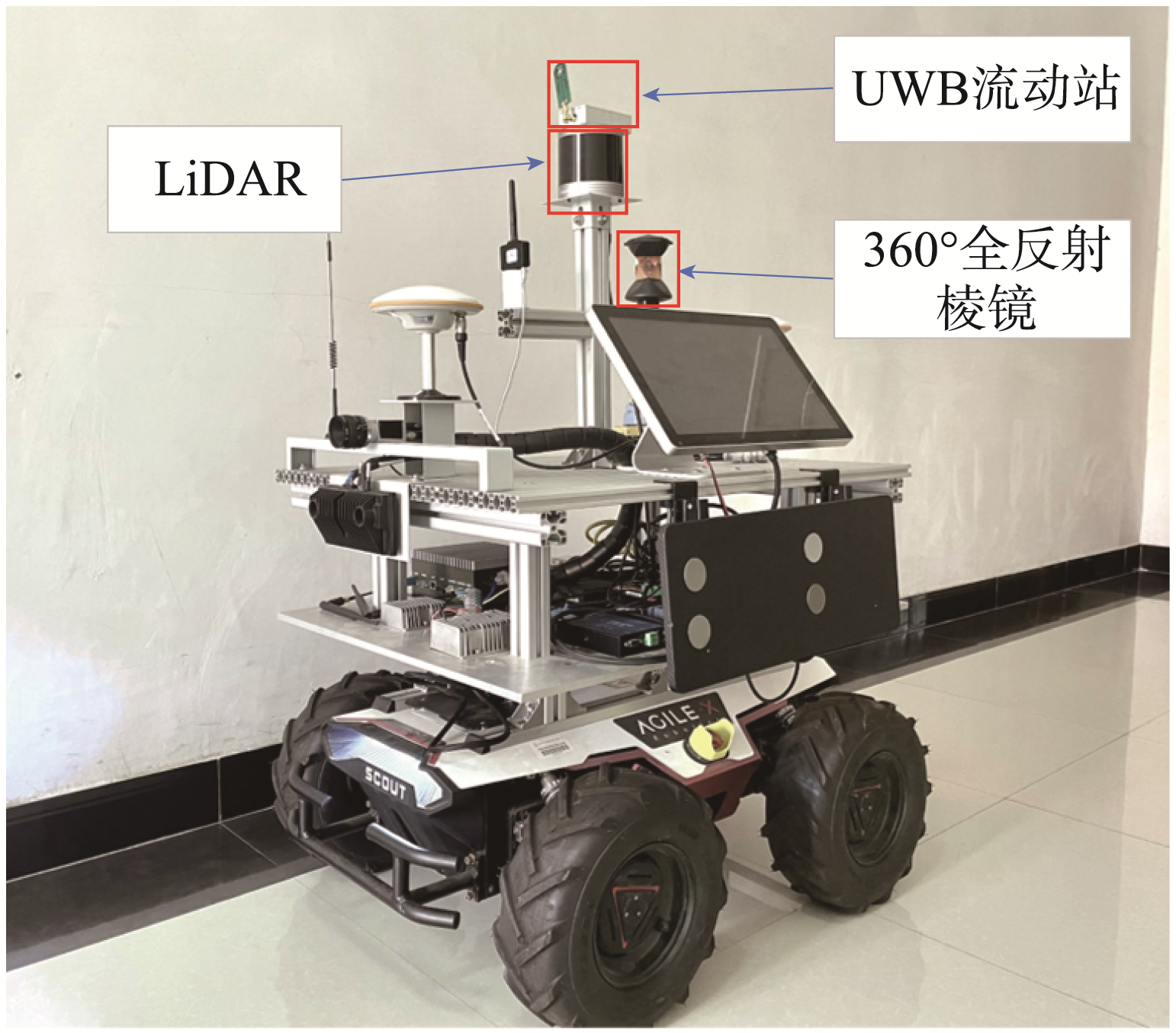
Fig. 3
Fusion positioning experimental platform
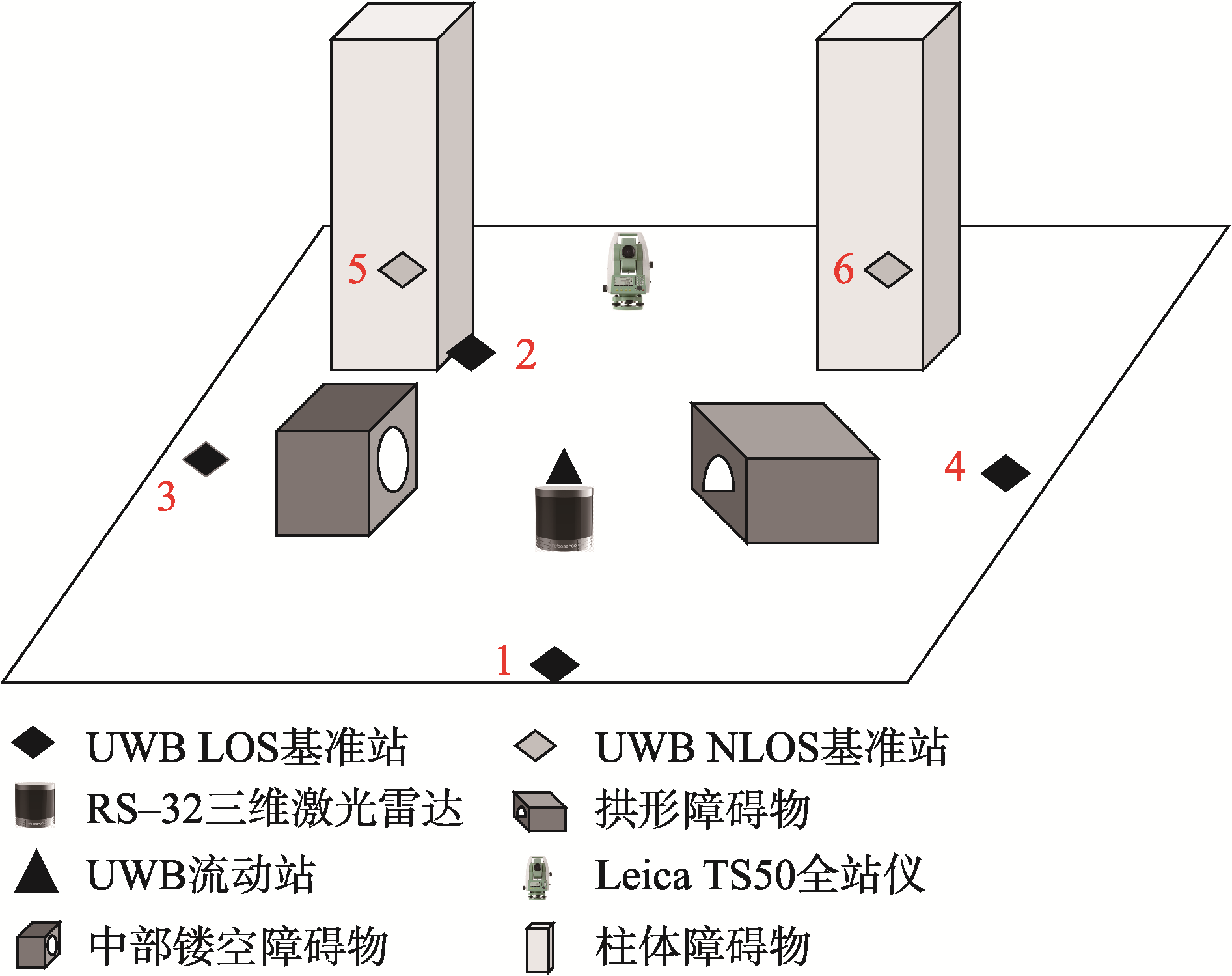
Fig. 4
Static experiment scene diagram
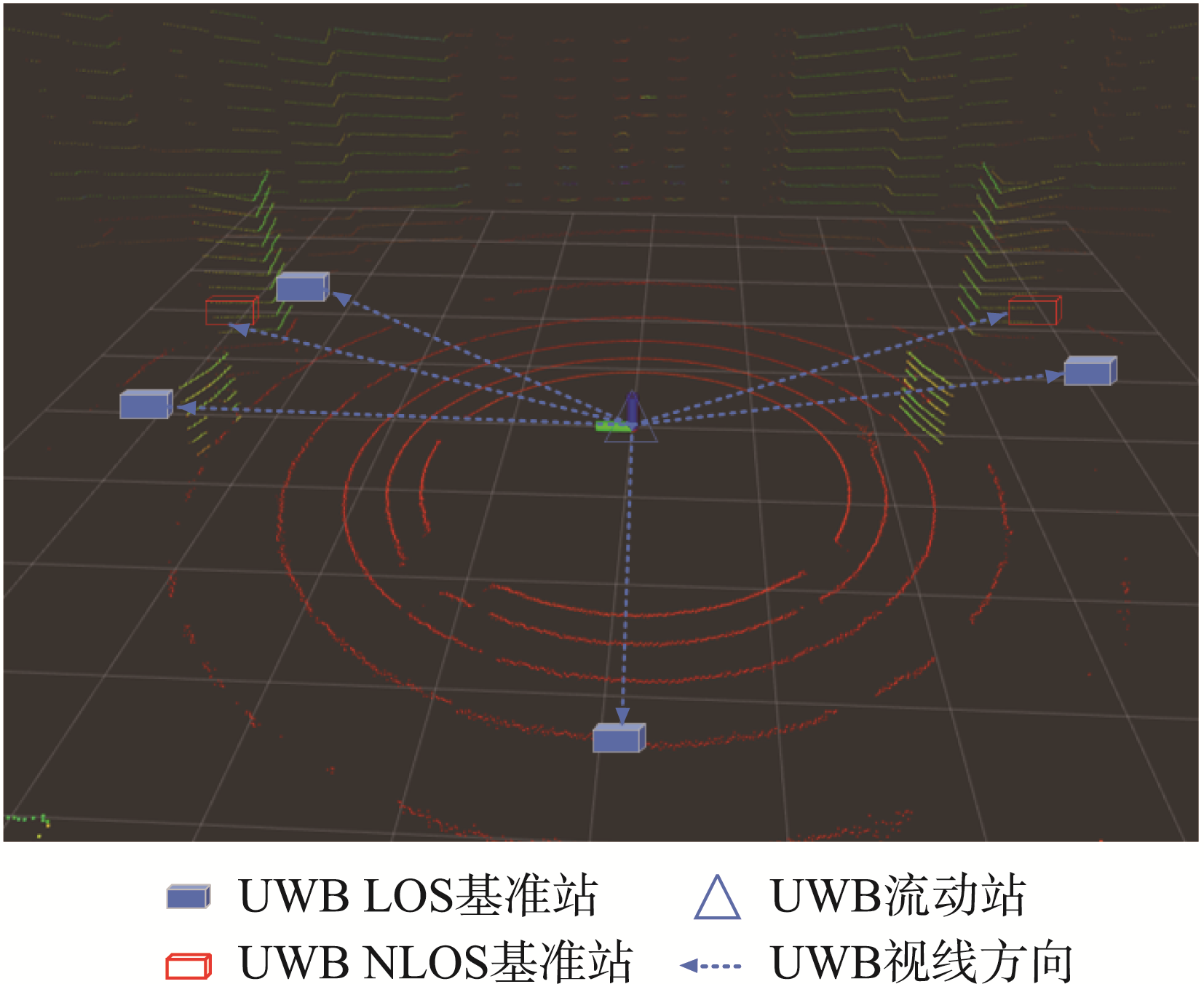
Fig. 5
3D Point cloud view
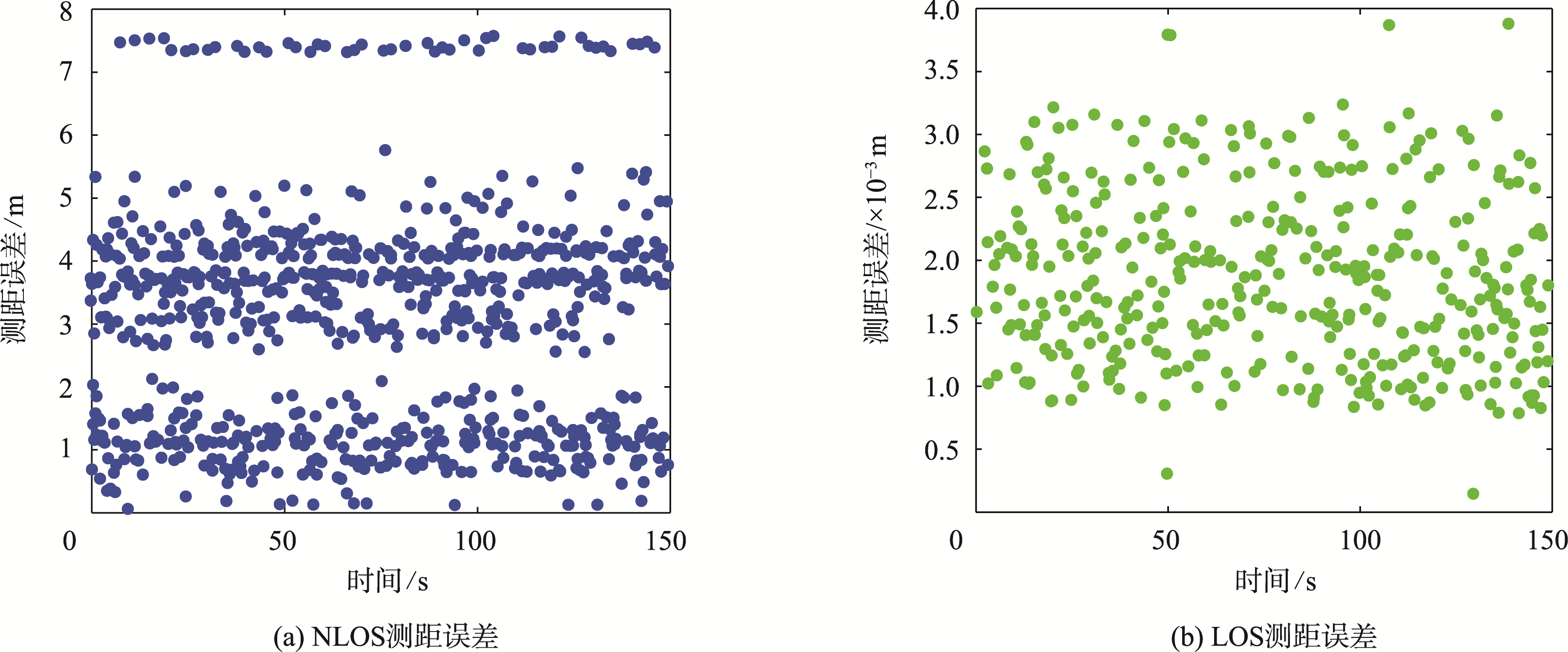
Fig. 6
Comparison of ranging errors in NLOS and LOS scenarios during static experiment
Tab. 1
Number of NLOS base stations identified by different algorithms (个)
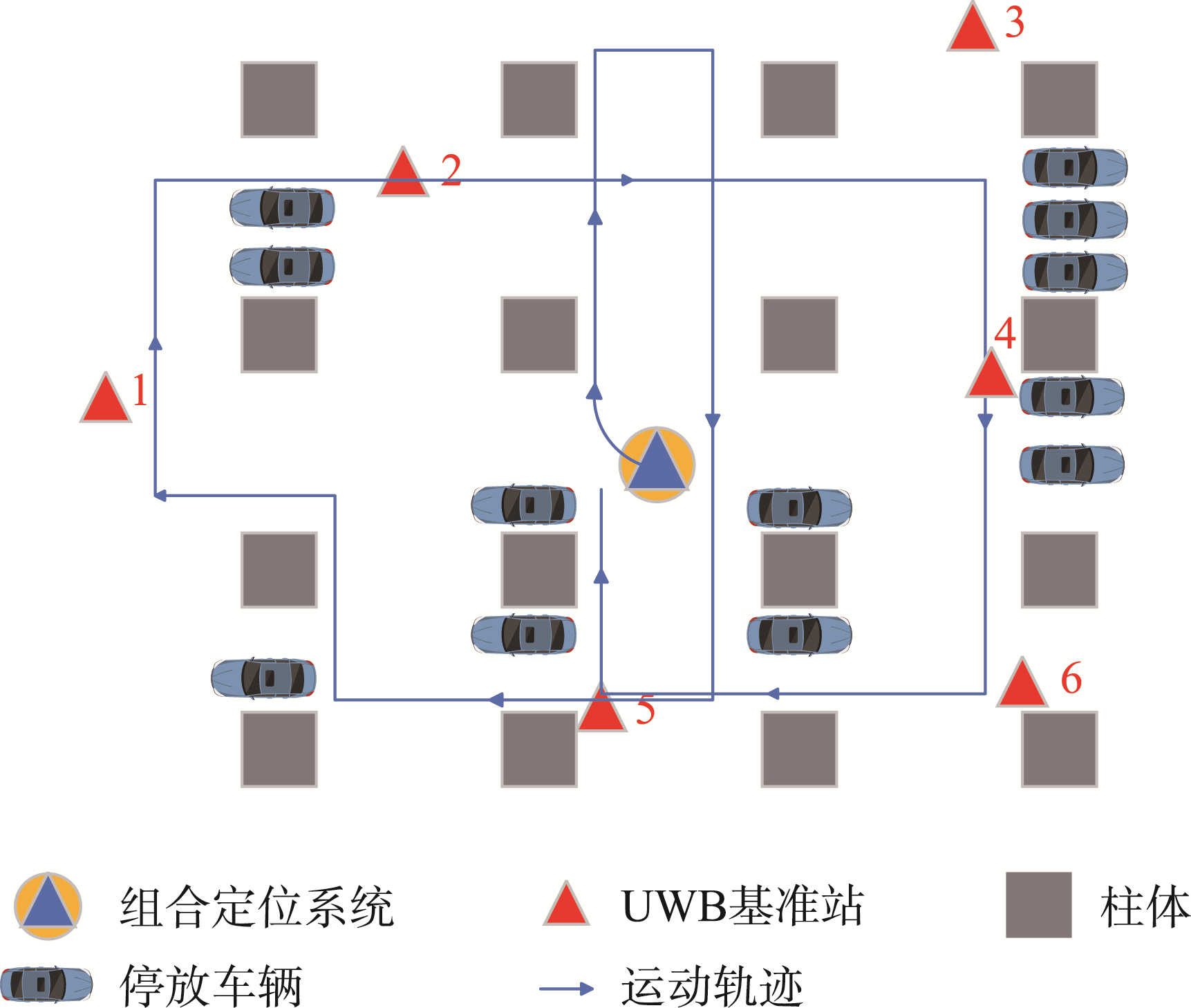
Fig. 7
Experimental layout of the underground parking lot
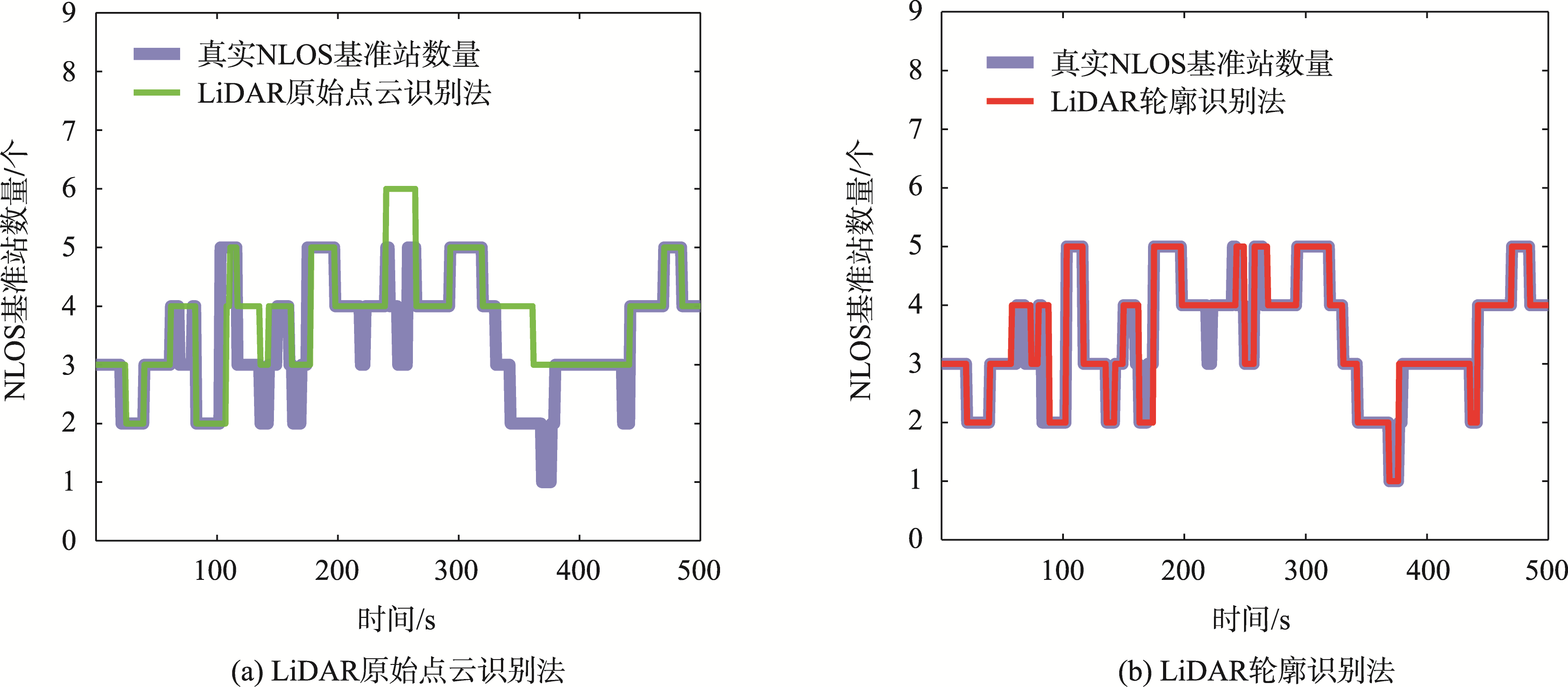
Fig. 8
Comparison of the number of NLOS reference stations identified by dynamic recognition algorithms
Fig. 9
UWB base station original ranging errors and LOS ranging errors
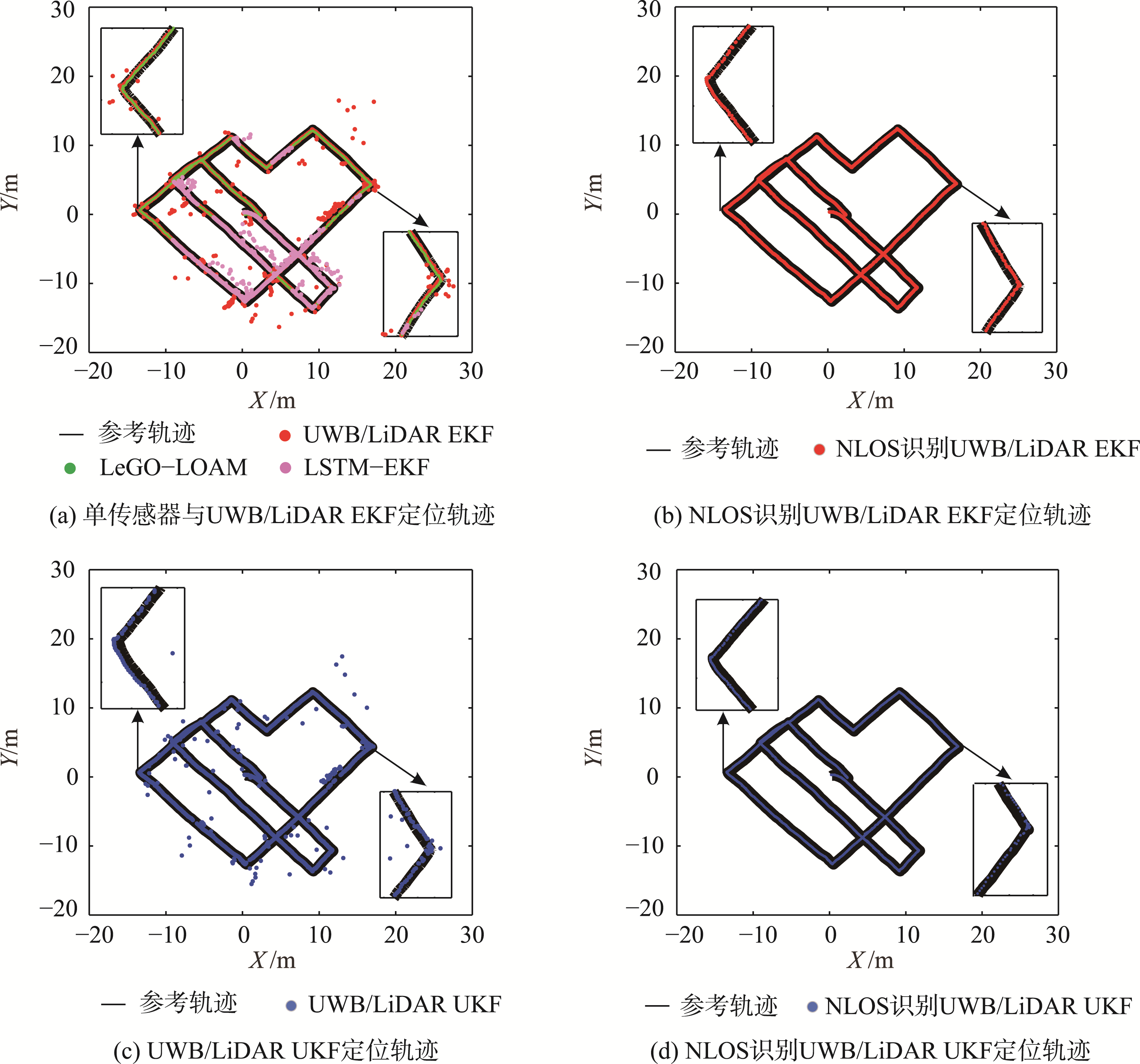
Fig. 10
Comparison of positioning trajectories using different algorithms
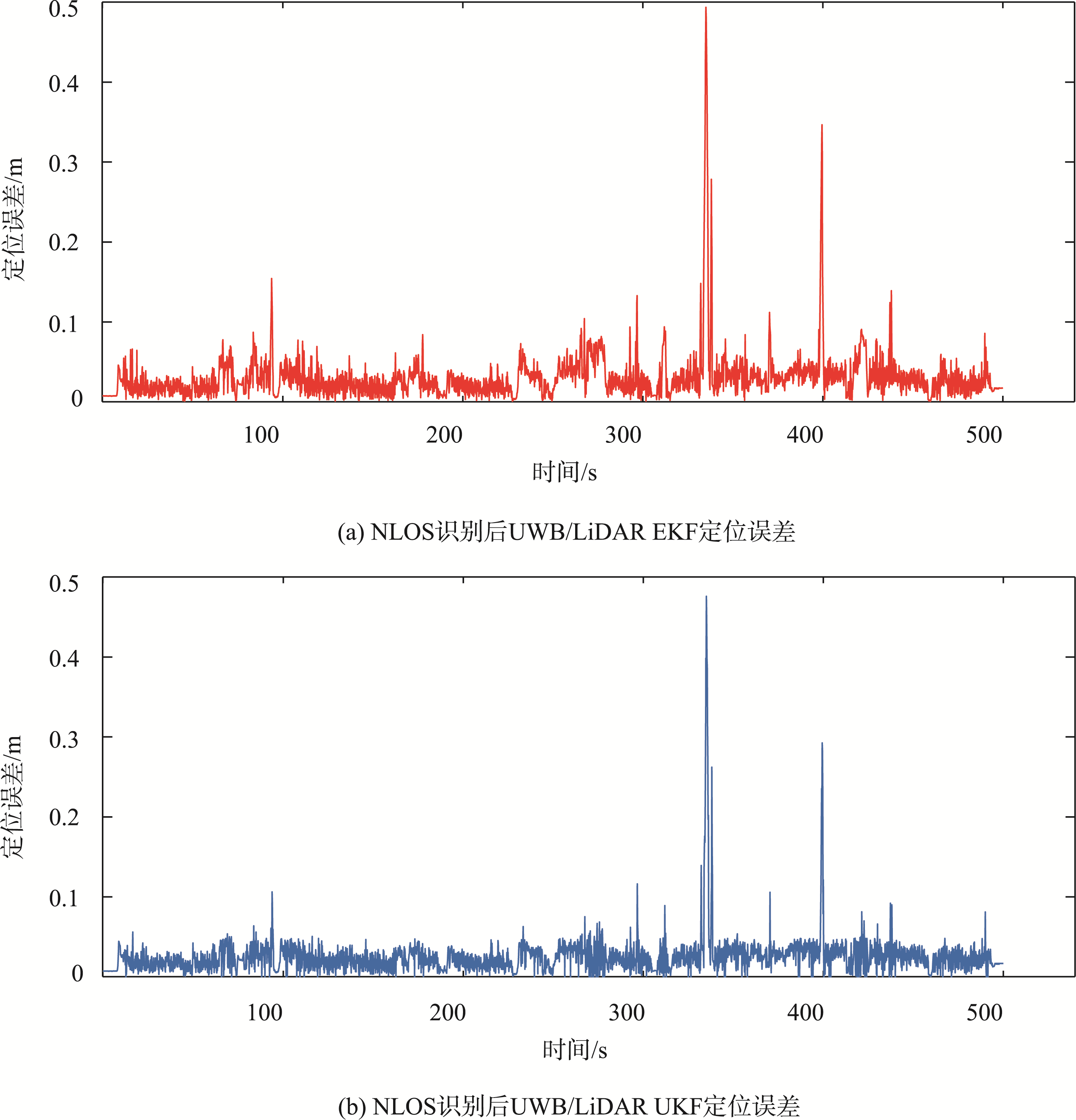
Fig. 11
Positioning errors of UWB/LiDAR fusion after NLOS identification
Tab. 3
Precision comparison between LeGO-LOAM and five LiDAR/UWB fusion-based positioning algorithms before and after NLOS identification (m)