全球离散格网系统是指把地球表面按照一定规则离散分割成多分辨率层次结构的格网单元,广泛应用于海量多源空间数据的组织、管理和分析中。六边形全球离散格网具有优良的几何特性,非常适合于空间数据的处理,如何进一步提高六边形全球离散格网编码运算的效率仍是当前研究的重点。本文采用正二十面体施耐德投影四孔径六边形全球离散格网模型,基于六边形三轴坐标与编码的二进制数的对应关系构建四孔六边形的基础编码结构,将二十面体划分为32个基础六边形,并将之分为3种基础六边形剖分瓦片,在每个六边形剖分瓦片采用基础编码结构进行编码,建立了四孔六边形全球离散格网编码,同时设计了并实现了四孔六边形编码与六边形三轴坐标之间的快速转换,基于此构建了一种高效的四孔六边形全球离散格网编码运算方案,包括编码的算数运算、空间拓扑运算和邻域检索运算及跨面运算。与现有的六边形全球离散格网编码运算方案相比,本文的方案进一步提高了编码算数运算、空间拓扑运算和邻域检索运算的效率,编码加法运算是HLQT的2~3倍,邻域检索运算分别是HLQT的3~5倍和H3的2~3倍,且受格网编码层次的影响较小,编码的跨面邻域检索运算时间略高于面内的运算,可以为全球离散格网系统的研究应用提供支撑。

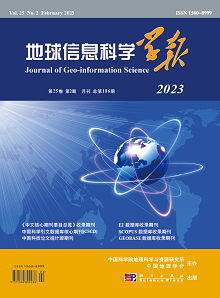
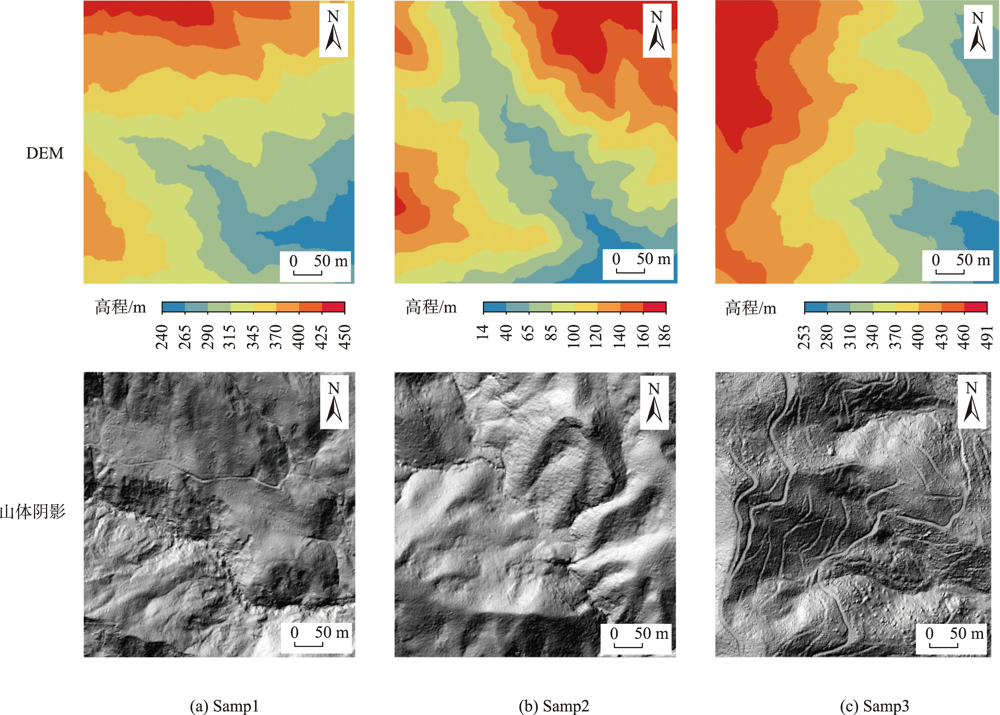
如何使用少量的地形特征复原地形地貌一直为地学领域的难题。本文使用开源数据集提取地形特征要素,使用地形特征要素作为约束条件构建了用于生成DEM的条件生成对抗网络(Conditional Generative Adversarial Networks, CGAN),设计了基于开源DEM、开源DEM与遥感影像组合、以及5m高精度DEM提取地形特征要素生成DEM的对比实验,并对结果进行视觉效果、相关性分析以及地形因子的对比与评价。结果表明:① 在视觉效果上,3种不同方式生成的DEM在视觉效果上均十分逼近原始5 m DEM,都远好于传统插值方法生成DEM,基于开源12.5m DEM提取要素和1m遥感影像的重建效果最接近于原始5 m DEM;② 在相关性上,三种不同方式生成的DEM与原始5m DEM相关性均能达到0.75以上,组合开源数据提取要素重建DEM与原始5 m DEM相关性可达到0.85以上;③ 在地形因子方面,基于开源12.5 m DEM和1 m遥感影像提取要素重建DEM的坡度和坡向的分布趋势与原始5 m DEM最为一致。本文为高精度DEM建模提供了新的思路,在高精度DEM难以获取的区域,可以利用开源数据集和条件生成对抗网络进行高精度地形建模,从而进行地学分析和地理模拟等。
机载LiDAR点云是获取高质量数字高程模型(Digital Elevation Model, DEM)的主要数据源,而地表粗糙度作为DEM的主要派生产品,在地学研究中发挥了重要作用,但点云密度和插值方法对DEM及地表粗糙度精度影响程度并没有明确结论。为此,本文利用不同地形条件下的林区机载LiDAR点云为实验对象,将原始点云随机缩减为不同的采样密度,利用5种常用插值方法(克里金(Ordinary Kriging, OK),径向基函数(Radial Basis Function, RBF),不规则三角网(Triangulated Irregular Network, TIN),自然邻域(Natural Neighbor, NN)和反距离加权(Inverse Distance Weighting, IDW))构建各个测区不同采样密度条件下的DEM,并通过空间特征和统计特征两方面对DEM及其地表粗糙度精度分析。结果表明:① DEM插值算法的精度随点云密度缩减而降低,且数据量缩减至原始数据量的30%后,不同算法精度区别较为明显,其中,RBF和OK精度最优,IDW精度最低;② DEM误差与地表粗糙度存在正相关,随数据密度降低,OK、RBF、IDW所得粗糙度与DEM误差的相关系数均降低,与TIN和NN的相关系数先降低后在30%处升高;③ 从插值生成的DEM中提取地表粗糙度,其误差随数据密度缩减而增大,其中IDW所得粗糙度的精度在密度为90%和70%时最高,而数据密度缩减至50%后,RBF能够更准确地捕捉到地形变化。
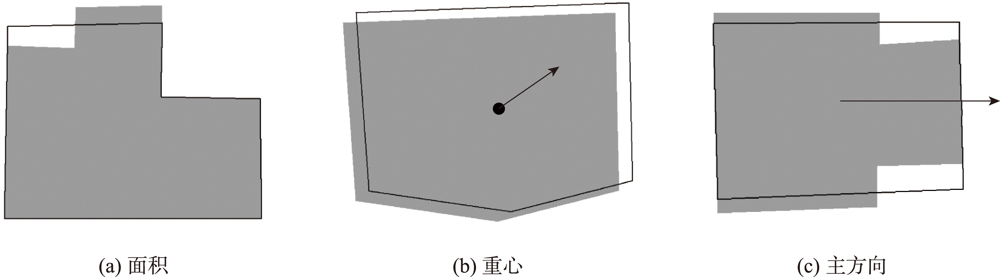
建筑物是大比例尺地图中的重要要素,其自动化简是制图综合领域的重要研究内容。针对当前化简方法仅侧重于某一方面的问题,本文提出一种顾及多特征约束的建筑物组合化简方法。首先,对建筑物进行冗余点删除、尖角去除等预处理操作;然后根据化简阈值筛选出需要化简的短边,并对其局部结构进行自动分类识别;然后,充分考虑建筑物的位置、面积、方向和形状等特征约束的影响,针对不同的结构类型采用不同的化简操作,在化简的过程中采用阈值逐渐增大的渐进式确定方法,直到满足化简要求为止;最后,从多个特征角度对化简结果进行评估,对不合理的化简实体进行调整修改。以OpenStreetMap数据为例进行实验,并与其它化简方法进行对比,实验结果表明,本文所提的方法可以有效保持建筑物的面积、形状、直角等基本特征,可以实现建筑物的自动连续化简,具备一定的通用性。
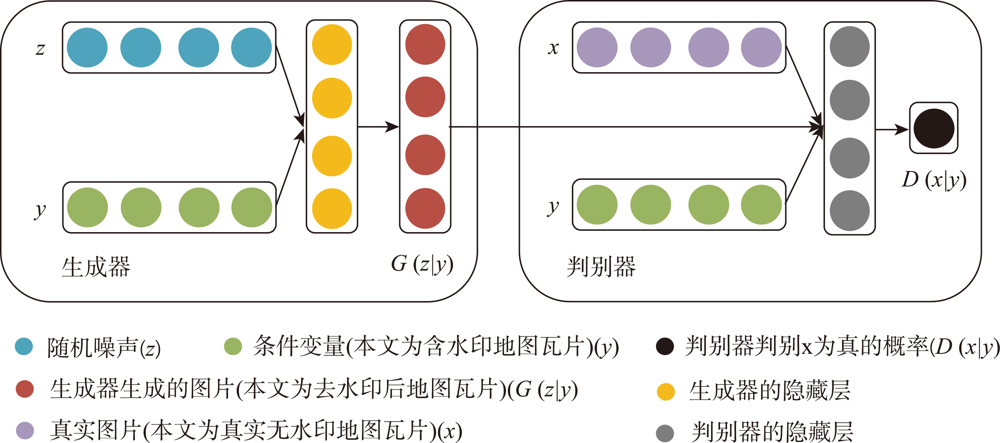
水印对于电子地图版权的保护十分重要,开展可视水印的去除研究有助于从攻防对抗的角度评价可视水印的有效性,进而提高电子地图可视水印的抗攻击研究水平。针对已有基于深度学习的可视水印去除方法存在训练样本量大、效率低、可视水印去除后有残留或要素丢失等问题,本文提出一种基于条件生成对抗网络(CGAN)的电子地图可视水印去除方法。该方法的模型主要由一个生成器和一个判别器组成,其中生成器采用U-Net结构,保证去除可视水印后生成的地图区域的真实性,判别器则采用基于区域判别的全卷积网络,通过对抗训练来区分生成的地图瓦片与真实地图瓦片之间的差异,使得可视水印去除后重建的电子地图更接近真实地图。实验表明,本文提出的方法简单易行,模型训练速度比基于全卷积网络的算法快4倍,能够去除文字、彩色图像及二者混合等模式的可视水印,可实现Google、高德、百度等国内外地图厂商提供的导航电子地图、遥感影像等多种地图瓦片上的可视水印批量去除,无需人工干预,且水印去除后的地图瓦片与原始真实地图瓦片有着良好的结构相似性。
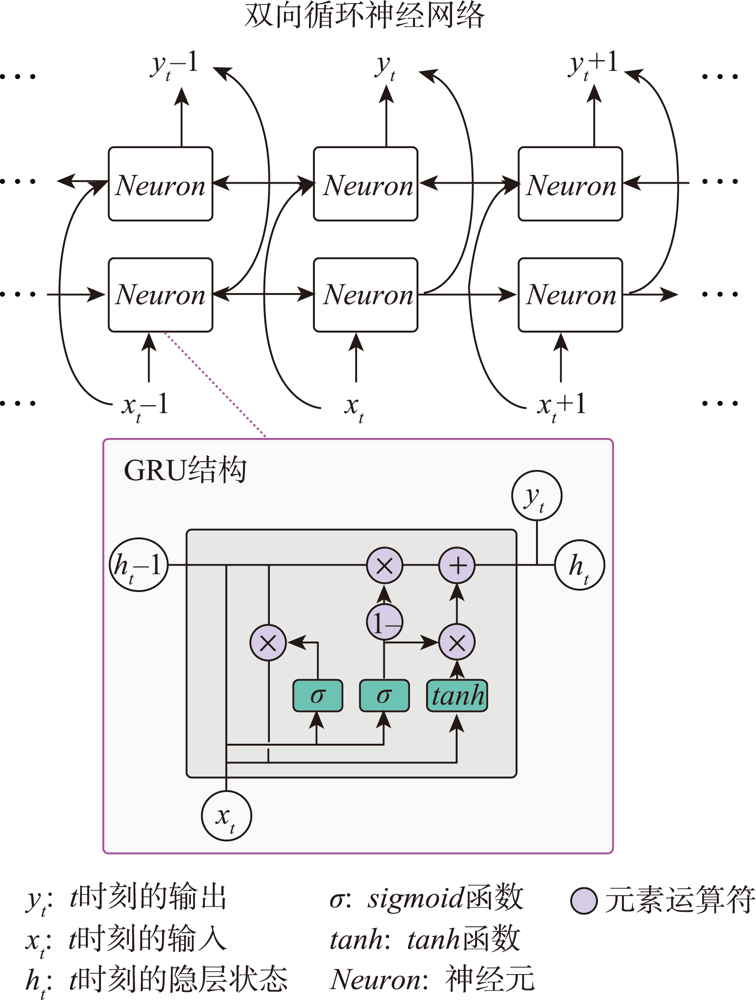
为实现精准的旅游景区客流量的高时频预测,本研究构建了一套基于LBS和深度学习模型的预测方法。此方法可通过对LBS数据的转换实现预测的空间范围与时频控制,并通过方法的核心模型——基于双向循环神经网络和GRU算法构建的深度双向GRU(DBi-GRU)模型完成预测。为检验方法的有效性,研究以深圳大梅沙海滨公园为例对方法进行实验测试。实验使用拟合曲线、误差指标及DM检验3种方法评估DBi-GRU模型的预测效果。此外,实验还设置了其他五种深度学习模型作为DBi-GRU的对照模型,测试基于不同深度学习算法的模型之间的预测水平差异。实验结果表明:① 本研究提出的DBi-GRU模型在景区客流量高时频预测中具有理想的预测效果,在高峰时段的客流量预测方面也具有较高准确性,预测效果明显优于其他深度学习模型;② 基于双向循环网络的模型的效果普遍优于基于常规循环网络的模型。尤其是基于双向LSTM算法的模型,虽然预测的准确度略逊色于DBi-GRU模型,但在模型性能上与其的差异并不显著;③ 在相同网络参数下,GRU算法较前人采用的LSTM和RNN算法有着更高的预测准确性。本研究为客流量预测领域的研究提供了一种新的可用于高时频预测的技术方法,所预测的高时频客流量信息可为景区的客流管控与服务安排等工作提供必要的信息支持。
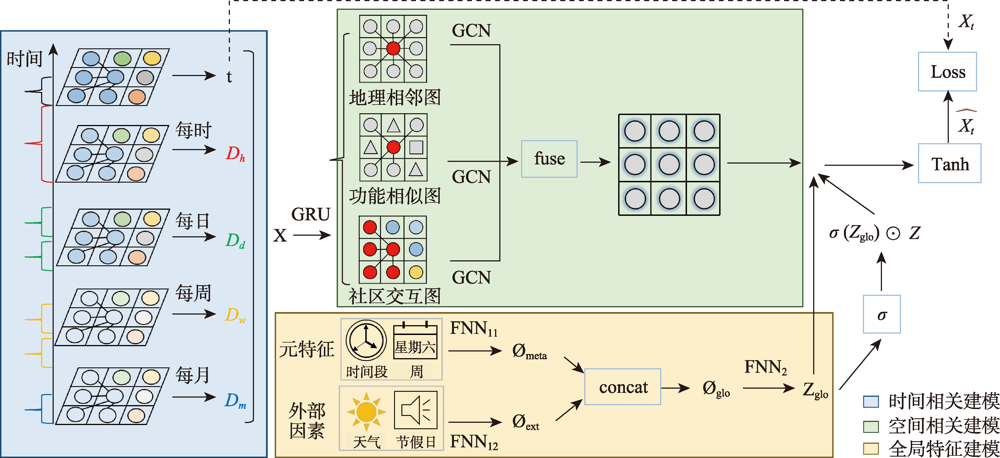
随着智能手机的普及,网约车成为常用的出行替代方式。网约车运营平台因此成为智能交通系统的主要组成部分,在满足公众出行需求中发挥重要作用。乘客需求预测是网约车系统需要解决的核心问题,现有文献中提出的模型忽略了长期时间相关性及多种空间相关性,本文针对现有研究成果存在的局限性,在充分考虑网约车乘客出行需求时空相关独特性的基础上,提出一种融合全局特征的时空多图卷积网络(Spatio-Temporal Multi-Graph Convolutional Network Fused With Global Features,GST-MGCN)模型。该模型遵循临近性、周期性和趋势性(Closeness, Period and Trend,CPT)范式,利用时序信息拟合时间依赖关系;通过识别多种空间语义相关性构建对应的关系图结构、建立多图卷积模型;模型中的全局特征融合模块,使用门控融合和总和融合方法分别捕捉乘客需求的突变和渐变。以海口市数据集为样本的实验结果表明,本文提出的GST-MGCN模型MAE、RMSE和MAPE指标的值分别是2.269、3.917、21.447,优于其他同类主流模型。本研究证明提出的模型GST-MGCN可以有效挖掘网约车乘客出行需求的时空模式,提取全局特征的影响,对其进行准确的预测。
在生态危机日益严峻和生态文明建设日益加快的背景下,中国特殊的区域差异与自然环境限制了人口的均匀分布与社会经济全空间布局,形成了面积大、分布广的荒野地(Wilderness Areas,WAs)。客观、准确界定荒野地的空间范围并分析其时空演变格局,对于开展资源环境承载力评价、生物多样性保护、国家公园与生态安全屏障建设等具有重要意义。当前,对荒野地面积、分布特征与时空演变格局等研究少有定论。本文以2000、2010、2020年多源空间数据为基础,从决定和影响的角度出发,构建荒野地多要素识别模型,对中国荒野地空间范围进行界定,分析其地理分布特征及时空演变格局。研究结果表明:① 基于多源空间数据,通过建立荒野地决定-影响的耦合关系模型,可准确、有效地识别中国荒野地空间范围;② 中国荒野地在空间上呈现大范围集中分布,小区域零散分布的状态,3个时期荒野地总面积分别为344.18、297.67、279.86 万km2,主要分布在西藏、新疆、青海、内蒙古、黑龙江等省区;③ 中国荒野地面积大部分来源于草地和未利用地,2000—2020年,荒野地面积呈现出逐渐减少的趋势,且2000—2010年的减少速率要高于2010—2020年;④ 大部分自然保护区和首批国家公园主体分布于荒野地中,2020年荒野地被保护面积达63.21万km2,占自然保护区总面积的69.32%。

创新驱动战略的深入推进促使创业型经济繁荣发展,科技型初创企业日益成为促进中国科技进步和经济高质量发展的决定性力量。本文基于2015—2020年中国科技型初创企业数据,运用泰尔指数、核密度估计等方法解析了科技型初创企业的时空格局,并利用OLS模型与SARAR模型定量识别了科技型初创企业分布的影响因素。研究发现:① 从时间序列来看,2015—2020年中国科技型初创企业的数量快速增长,但是在城市体系的分布呈现持续的层级结构特征;② 从空间格局看,中国科技型初创企业呈现出以长江三角洲、珠江三角洲为主要核心,京津冀为次要核心的多核心分布模式,创业热点从三大核心扩张到更多地区,东中西三大地带的不平衡性日益增强;③ 风险投资、知识厚度、人力资本、市场规模、孵化环境和政策环境对城市科技型初创企业的发展具有积极影响,创业生态系统的影响也表现出空间依赖性和空间异质性特征,而且不同影响因素的作用强度和相对重要性在不同发展阶段存在差异。未来应重视高质量科技创业生态系统建设,因地制宜地选择适合本地科技型初创企业发展的驱动路径。

数字经济是构建现代化经济体系的重要引擎。企业投资是拉动数字经济增长的重要因素。数字经济产业的发展决策,亟需洞察相关企业投融资的结构性特征及其时空演化模式。本文以“数字中国”的思想源头和实践起点——福建省为研究案例,基于2000—2021年的数字经济企业投融资数据,采用复杂网络分析和负二项回归模型等方法,以地级市为基本研究单元,探究了福建省数字经济企业投融资的空间特征及影响因素,结果表明:① 福建省数字经济企业的投融资规模呈增长趋势,投资来源由以非数字经济企业为主转变为以数字经济企业为主;② 省外投资占比逐步提升,省外投资由2000年的8.56亿元增长至2021年的288.08亿元,占比由11.59%增长至31.06%,融资金额在福建省内“东高西低”的空间分布格局愈发明显;③福州市始终是企业投资首选的福建省内城市,而随着时间的推移,厦门、泉州等枢纽中心不断浮现,集聚形成以其为核心的福厦泉走廊;④ 投融资影响因素中,政策和信息化发展环境对数字经济企业投融资联系具有显著促进作用,地理距离对数字产业投融资联系的影响日益弱化。最后,研究结合福建省数字产业发展的时空演化特征及其影响要素,提出政策建议,以期为“数字福建”建设和福建省数字经济的持续健康发展提供科学支撑。

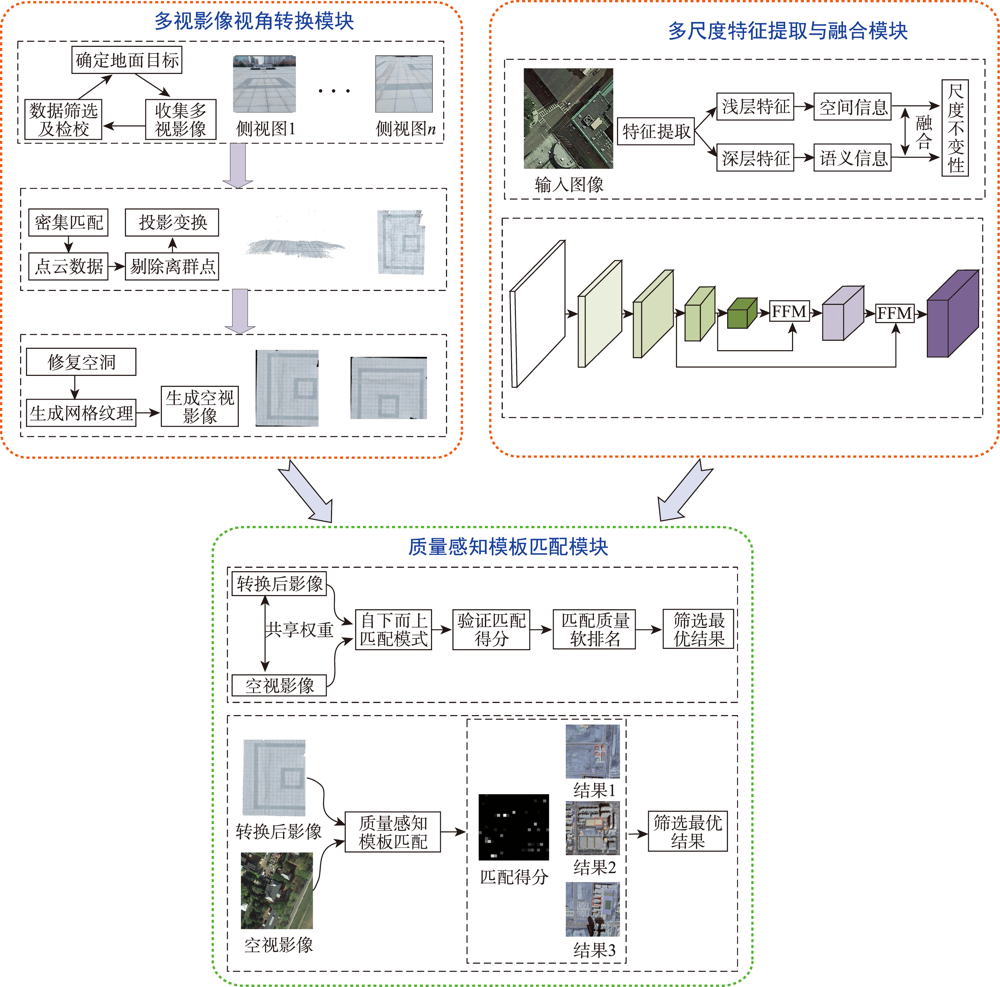
目前遥感影像跨视角匹配技术无法直接使用大幅卫星影像进行匹配,难以满足大范围复杂场景匹配的任务需求,且依赖大规模数据集,不具备良好的泛化能力。针对上述问题,本文在质量感知模板匹配方法的基础上结合多尺度特征融合算法,提出一种基于视角转换的跨视角遥感影像匹配方法。该方法首先利用手持摄影设备采集地面多视影像,经密集匹配生成点云数据,利用主成分分析法拟合最佳地平面并进行投影变换,以实现地面侧视视角到空视视角的转换;然后设计了特征融合模块对VGG19网络从遥感影像中提取的低、中、高尺度特征进行融合,以获取遥感影像丰富的空间信息和语义信息;最后利用质量感知模板匹配方法将从视角转换后的地面影像上提取的特征与遥感影像的融合特征进行匹配,获取匹配的软排名结果,并采用非极大值抑制算法从中筛选出高质量的匹配结果。实验结果表明,在不需要大规模数据集的情况下本文方法具有较高的准确性和较强的泛化能力,平均匹配成功率为64.6%,平均中心点偏移量为5.9像素,匹配结果准确完整,可为大场景跨视角影像匹配任务提供一种新的解决方案。
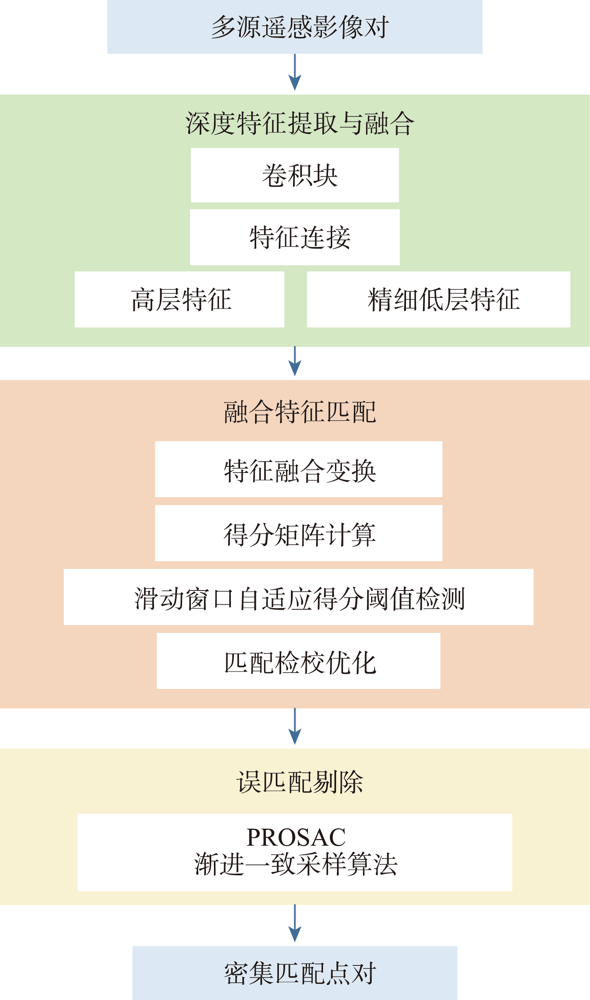
针对多源遥感影像之间成像机理不同、非线性光谱辐射畸变大以及灰度梯度差异明显等所导致的匹配困难问题,提出深度特征融合匹配算法(Feature Fusion Matching Algorithm, FFM)。① 通过构建特征图金字塔网络提取影像深度特征,使用特征连接结构将语义丰富的高层特征与定位精确的低层特征互补融合,解决多源影像同名特征难以表征的问题并提高特征向量的定位精度;② 对原始维度1/8的特征图进行交叉变换来融合自身邻域信息与待匹配影像特征信息,通过计算特征向量间的相似性得分得到初次匹配结果,针对特征稀疏区域,提出滑动窗口自适应得分阈值检测算法来提升匹配效果;③ 将匹配结果映射至亚像素级特征图,在小窗口内计算像素间的匹配概率分布期望值来检校优化匹配结果,提高匹配点对的准确性;④ 使用PROSAC算法对匹配结果进行提纯,有效剔除误匹配的同时最大限度保留正确匹配点。试验选取6对多源遥感影像,将FFM同SuperPoint、SIFT、ContextDesc以及LoFTR算法进行对比,结果表明FFM算法在匹配点正确率、匹配点均方根误差以及分布均匀度等方面远优于其他算法。将FFM匹配结果用于多源遥感影像配准,配准效果得到较高提升。
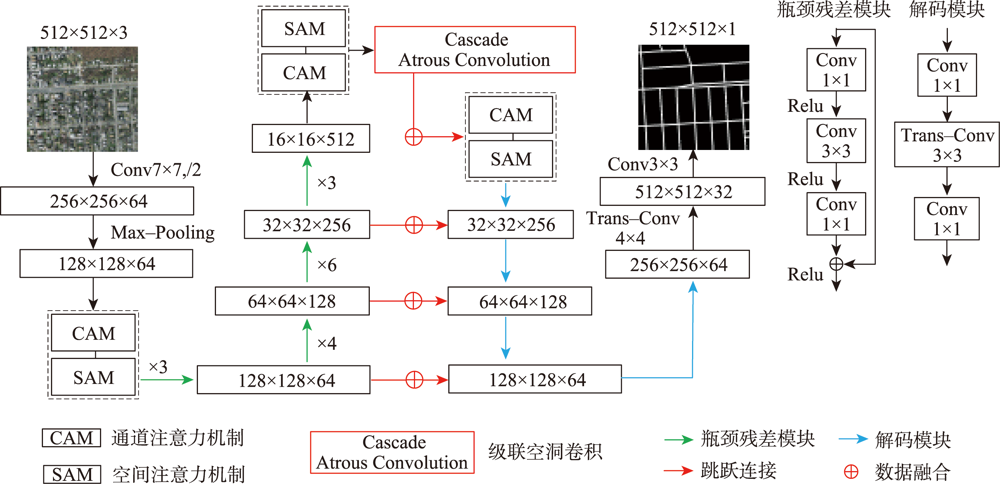
高分辨率遥感影像中,道路光谱信息丰富,且空间几何结构更清晰。但是,基于高分遥感影像的道路提取面临道路尺寸变化大、容易受树木、建筑物及阴影遮挡等因素影响,导致提取结果不完整。此外,高分遥感影像中同物异谱和异物同谱现象较为严重,从而影响道路提取结果连续性及细小道路信息完整性,而且难以区分道路和非道路不透水层。因此,本文提出基于双注意力残差网络的道路提取模型DARNet,利用深度编码网络,获取细粒度高阶语义信息,增强网络对细小道路的提取能力,通过嵌入串联式通道-空间双重注意力模块,获取道路特征图逐通道的全局语义信息,实现道路特征的高效表达及多尺度道路信息的深层融合,增强阴影和遮挡环境下网络模型的鲁棒性,改善道路提取细节缺失现象,实现复杂环境下高效、准确的道路自动化提取。本文在3个实验数据集对DARNet和DLinkNet、DeepLabV3+等5个对比模型进行对比试验和定量评估,结果表明,本文DARNet模型的F1分别为77.92%、67.88%和80.37%,高于对比模型。此外,定性比较表明,本文提出模型可以有效克服由于物体阴影、遮挡和高分影像光谱变化导致道路提取不准确与不完整问题,改善细小道路漏提、错提等现象,提高道路网提取的完整性和连续性。
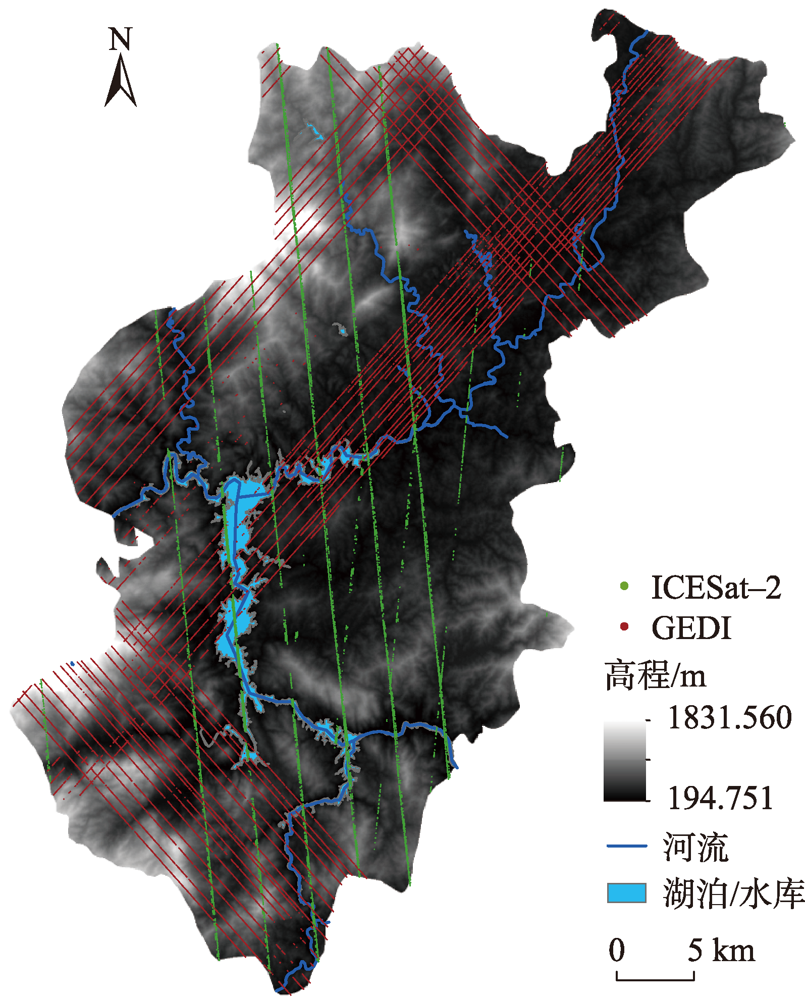
星载激光雷达ICESat-2和GEDI可以为数字高程模型产品的精度评价与修正提供全球覆盖的、可靠的高精度参考数据源。然而,现有的DEM修正方法主要是针对DEM误差中的植被高信号且多采用线性回归模型。为此,本文分析了ASTER GDEM v3精度与土地覆盖类型、高程、坡度、起伏度及植被覆盖率的关系。在此基础上,提出了一种考虑上述多种精度影响因素并结合XGBoost和空间插值的DEM误差修正方法。结果分析表明:原始ASTER GDEM的误差整体呈正态分布,平均误差为-3.463 m,存在较大负偏差,高程精度随着高程、坡度、起伏度及植被覆盖率VCF的增大呈降低趋势;经过修正后, ASTER GDEM平均误差降低到了-0.233 m,负偏差得到有效改善,整体平均绝对误差降低了26.04%,整体均方差降低了23.56%,耕地、林地、草地、湿地、水域及人造地表的DEM平均绝对误差和均方差都有不同程度的降低;本文提出的方法对多种特征要素与地形误差间的非线性关系进行拟合建模,在研究区取得了较好的修正效果。
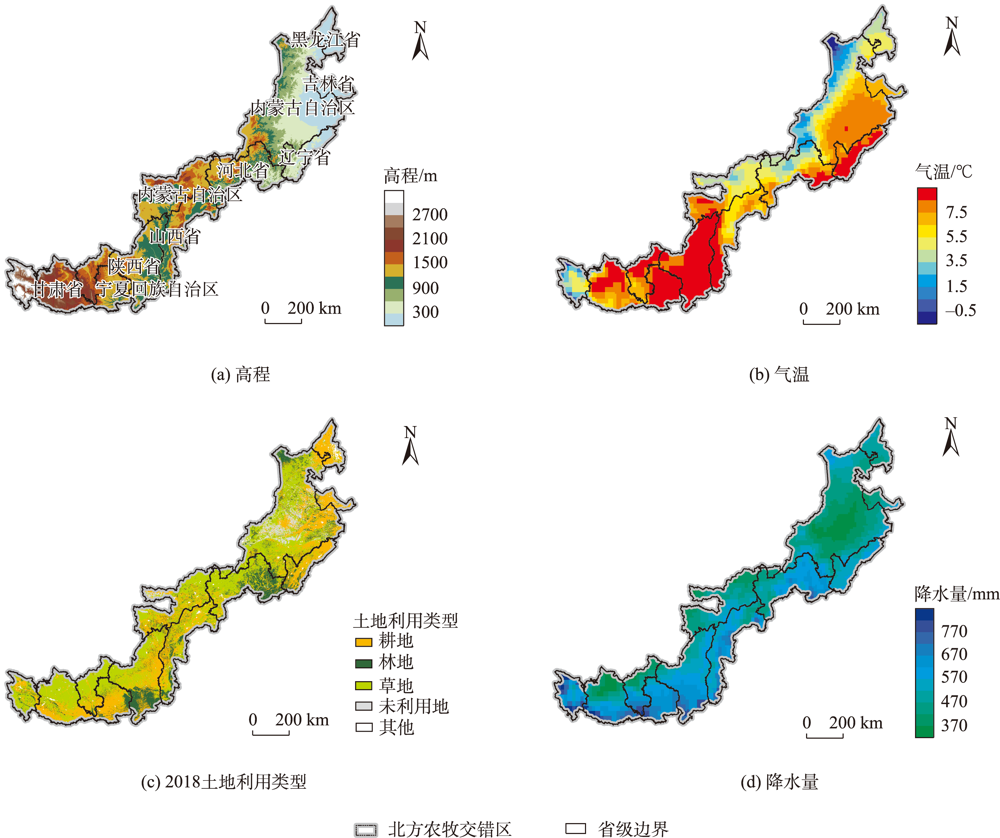
北方农牧交错区地处半湿润/半干旱生态脆弱过渡带,干旱是影响该区植被生产力的关键因素之一。探究干旱对植被总初级生产力的影响,对深刻理解气候变化下生态系统生产力变化响应特征及优化区域碳水循环具有重要意义。为了更好地了解水分限制区不同干旱特征对GPP影响,本研究以北方农牧交错区为例,基于长时间序列的标准化降水蒸散发指数(SPEI3,1900—2020年)和植被总初级生产力(GPP,1982—2018年)等数据,首先采用小波分析明确SPEI3与GPP强相关周期,在此基础上利用游程理论识别干旱特征,进而分析了北方农牧交错区干旱特征与GPP的变化趋势,最后厘定了不同干旱特征对GPP的影响。结果表明:① 1982—2018年北方农牧交错区SPEI3与GPP在半年周期和年周期存在显著相关关系,滞后效应随时间变化而变化;年际分析能够减弱滞后效应对SPEI3与GPP相关性的影响;② 1900—2020年北方农牧交错区干旱历时、干旱烈度和烈度峰值均呈现显著增加趋势,干旱烈度随着干旱历时和烈度峰值的增加而加剧,干旱特征高值区往往具有更强的增加趋势;③ 1982—2018年北方农牧交错区GPP总体呈现增加趋势,GPP高值区表现出更强的增加趋势;④ 不同干旱特征对GPP变化的影响不同,贡献率绝对值表现为干旱烈度>干旱历时>烈度峰值;整体来看,干旱特征共同解释了GPP变化面积的18.1%,干旱历时和干旱烈度显著抑制GPP增加;⑤ 不同的土地利用上植被GPP变化对干旱特征响应不同,乔木和灌木GPP下降主要来自干旱历时的负贡献,草地和耕地GPP下降则由干旱烈度的负贡献主导。