×
模态框(Modal)标题
在这里添加一些文本
关闭
关闭
提交更改
取消
确定并提交
×
模态框(Modal)标题
×
期刊
文章
图表
检索
EN
中文
首页
关于期刊
期刊定位与发展现状
数据库收录
期刊荣誉
编委会
投稿指南
期刊政策
期刊订阅
联系我们
EN
中文
图/表 详细信息
基于LiDAR点云的UWB NLOS识别及室内融合定位算法
隋心, 马昊楠, 王长强, 陈志键, 史政旭, 高佳鑫
地球信息科学学报, 2024, 26(
12
): 2686-2700. DOI:
10.12082/dqxxkx.2024.240442
测量值
误差对比
基准站1
基准站2
基准站3
基准站4
基准站5
基准站6
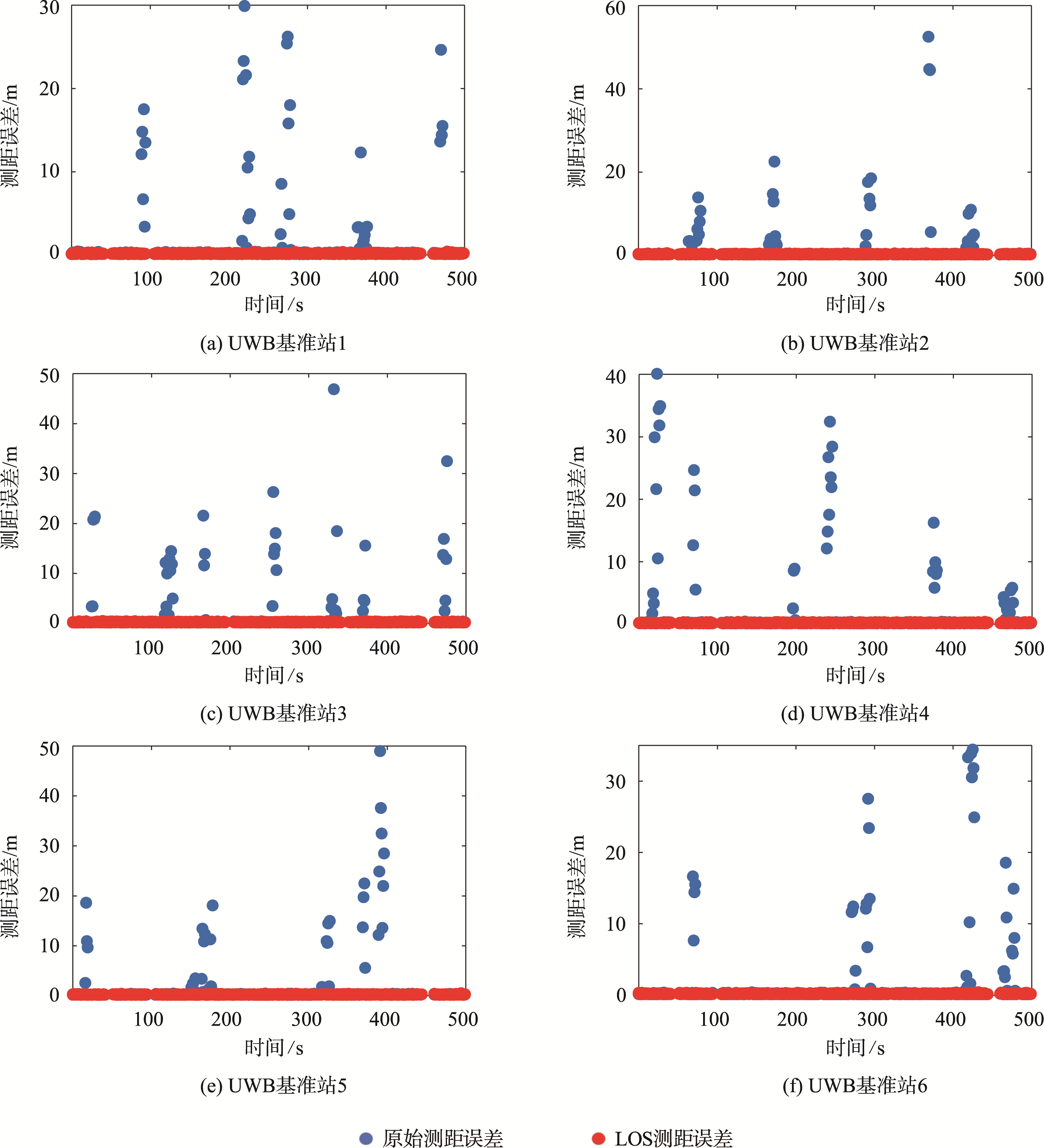
原始测量值
RMSE
2.642
1.734
1.695
1.638
1.246
2.284
MAX
29.972
52.304
46.728
39.960
48.853
31.629
LOS测量值
RMSE
0.068
0.085
0.097
0.080
0.079
0.062
MAX
0.604
0.936
0.747
0.831
0.639
0.908
表2
不同基准站的原始测距值和LOS测距值的测距误差
本文的其它图/表
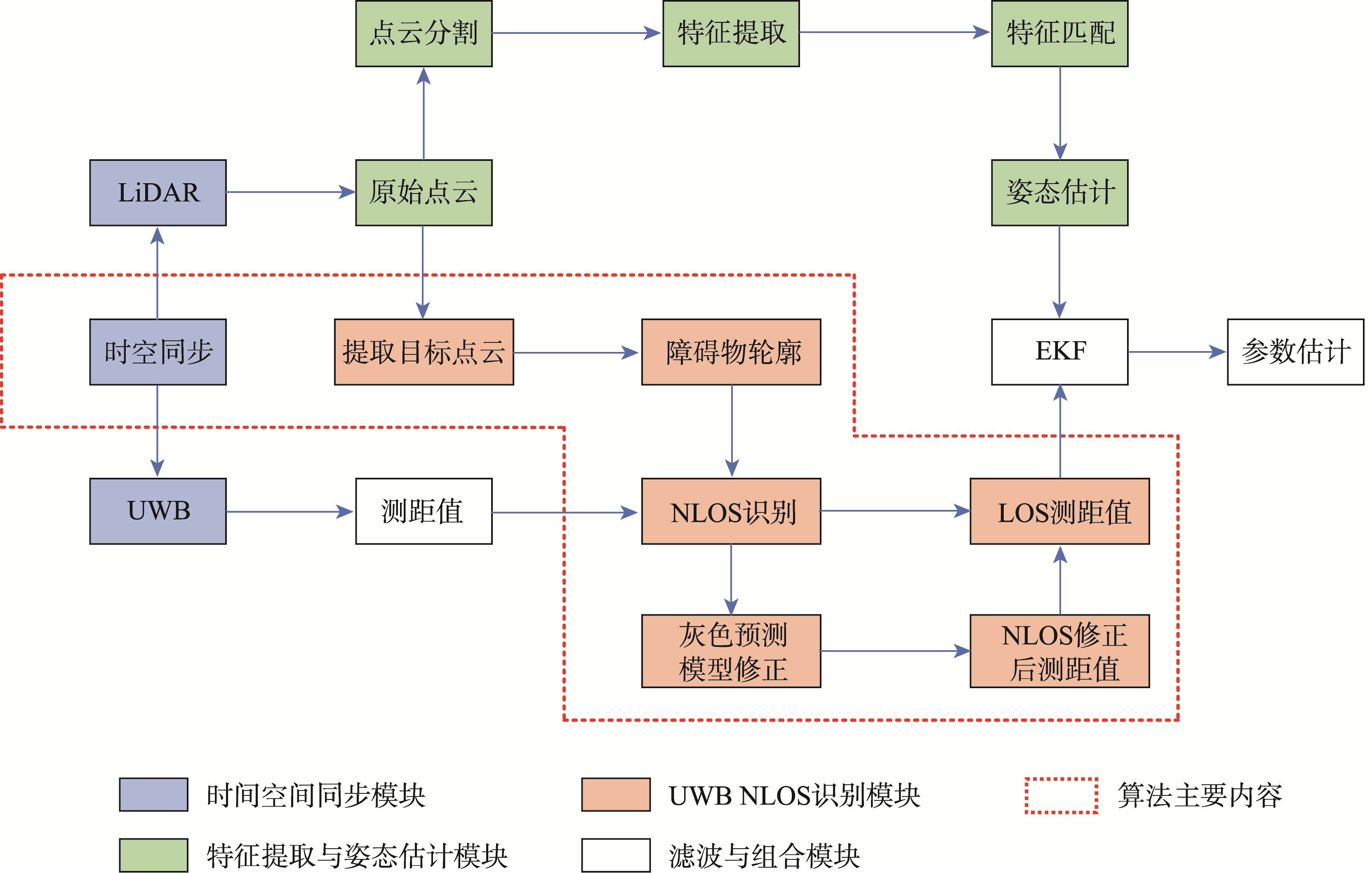
图1
基于LiDAR点云识别UWB NLOS的融合定位系统
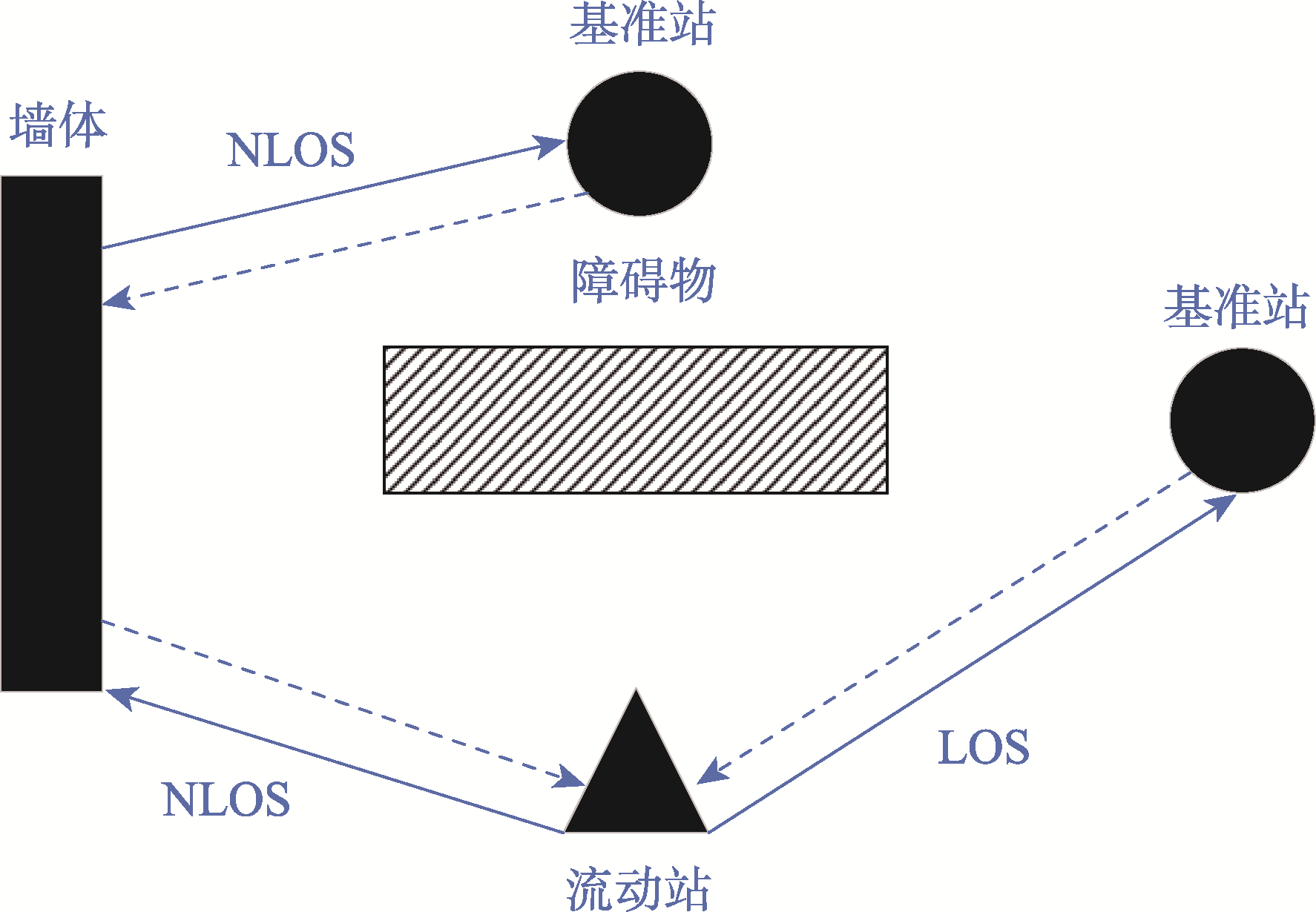
图2
室内NLOS与LOS传播示意图
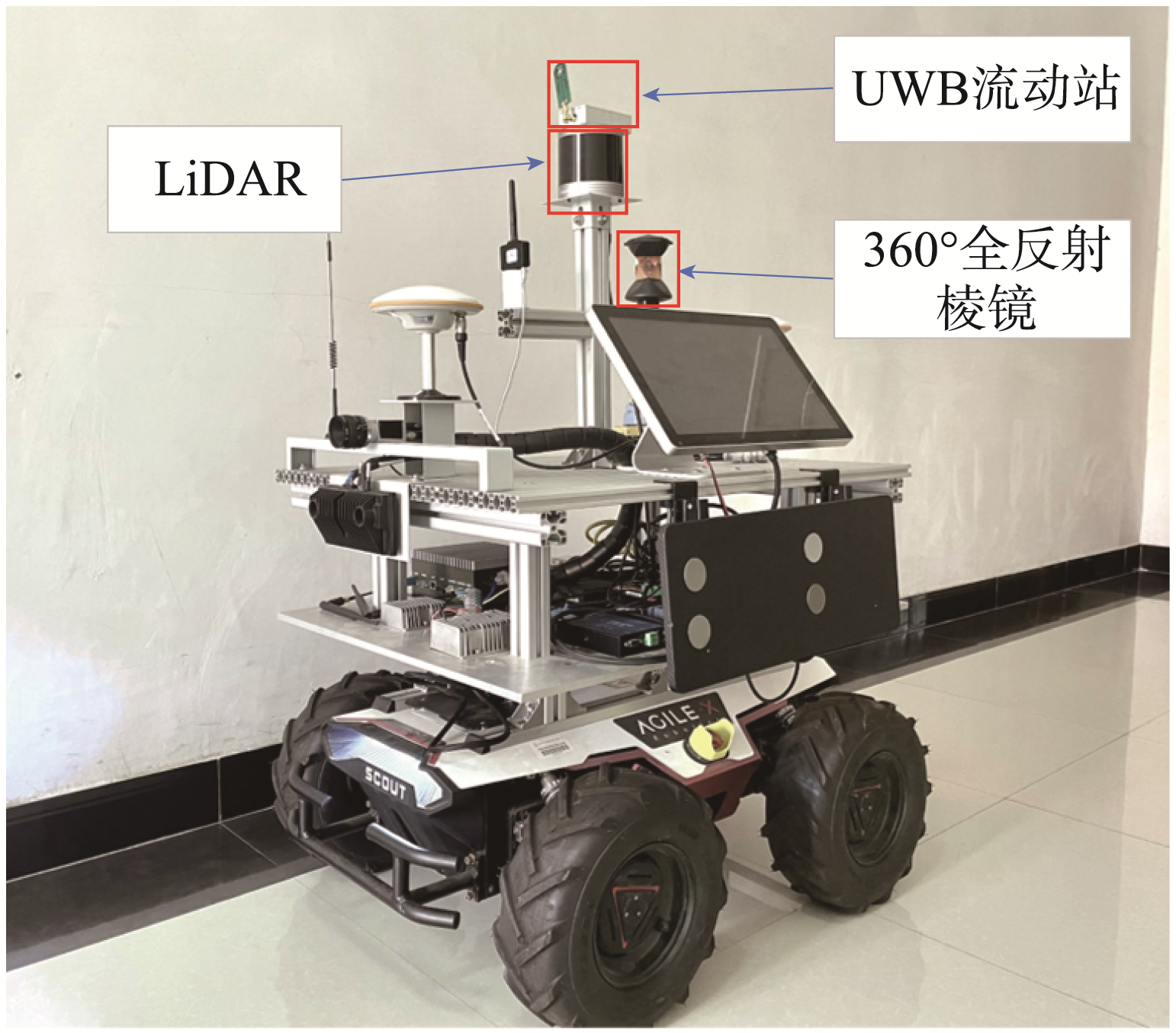
图3
融合定位实验平台
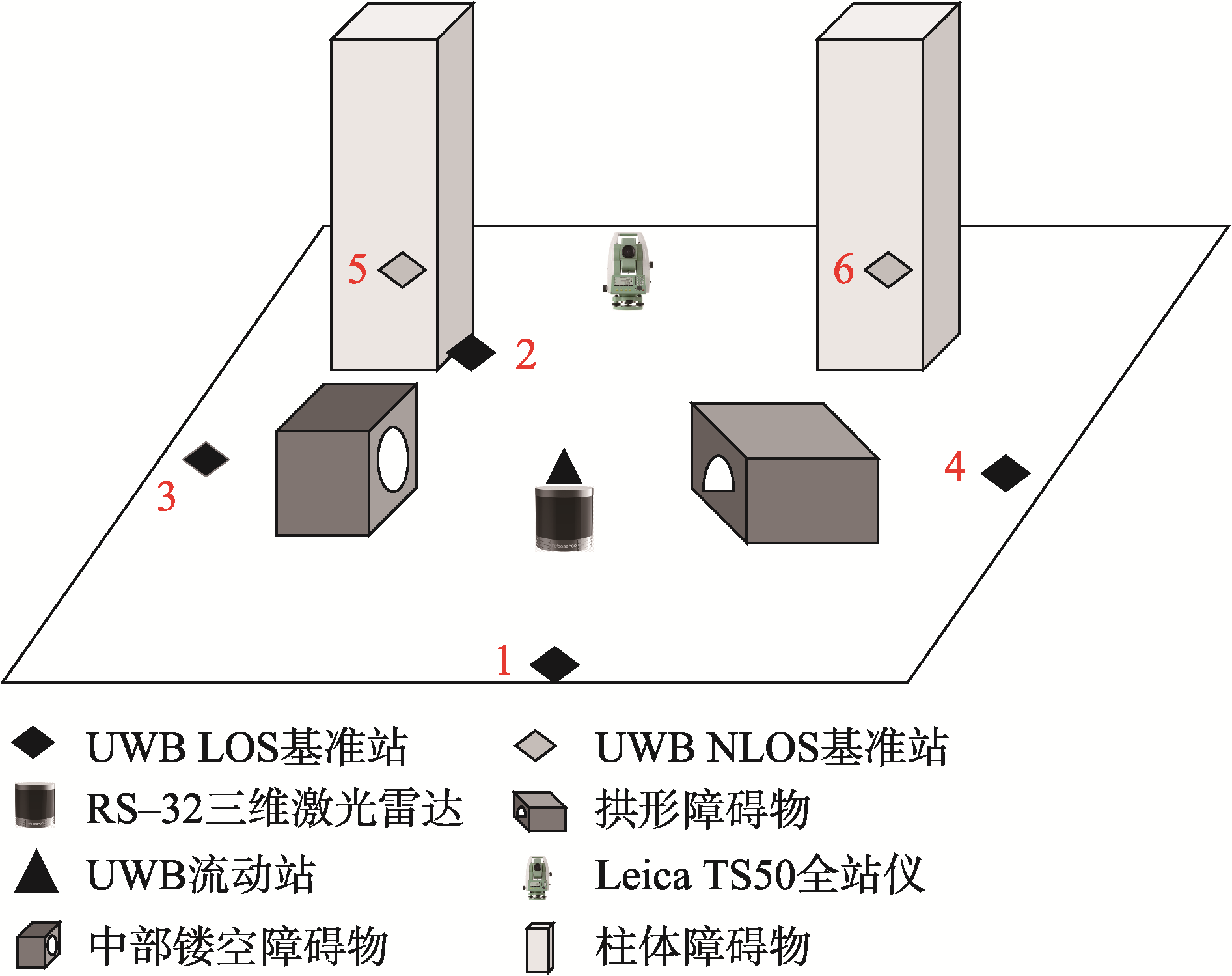
图4
静态实验场景
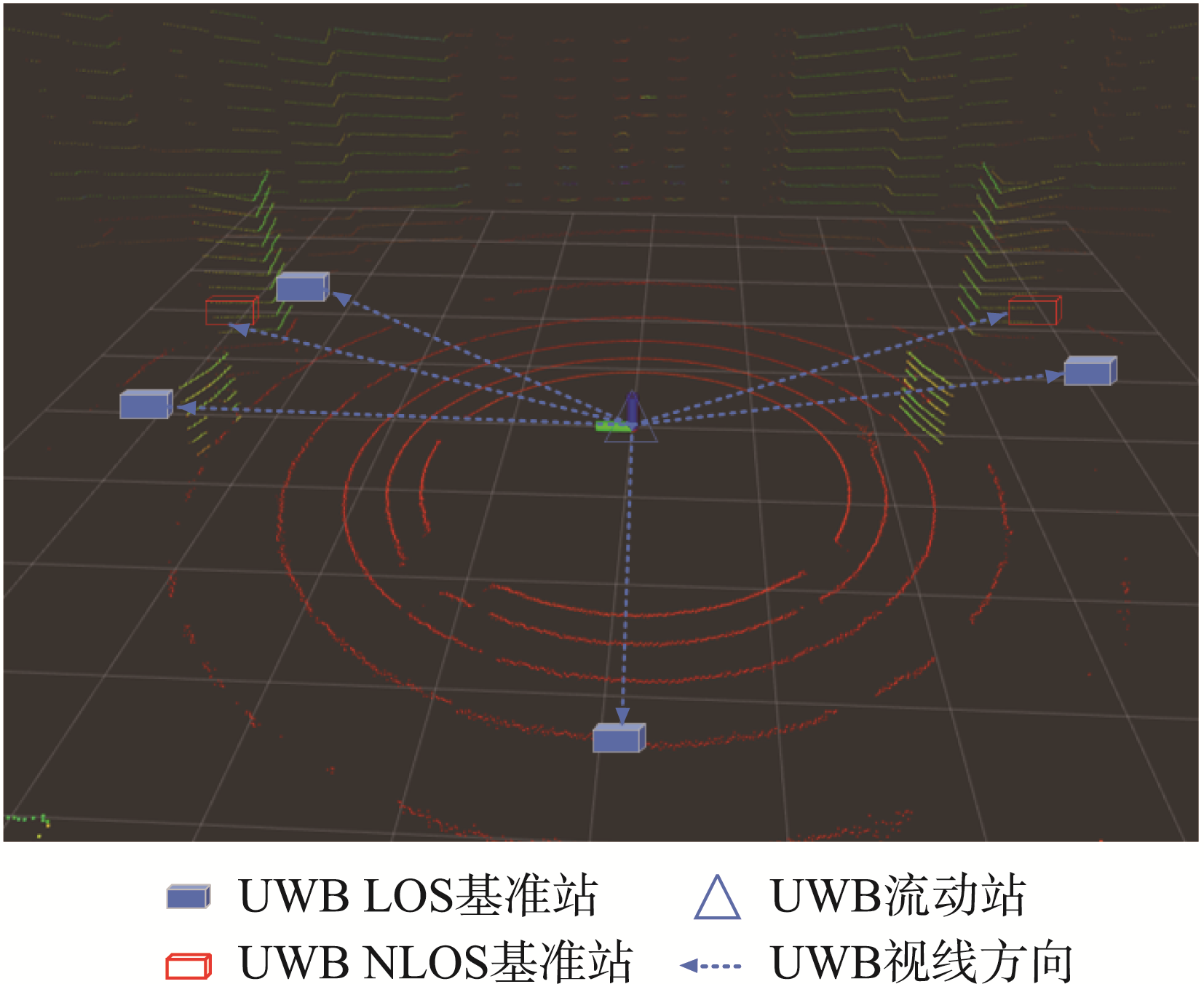
图5
3D点云视图
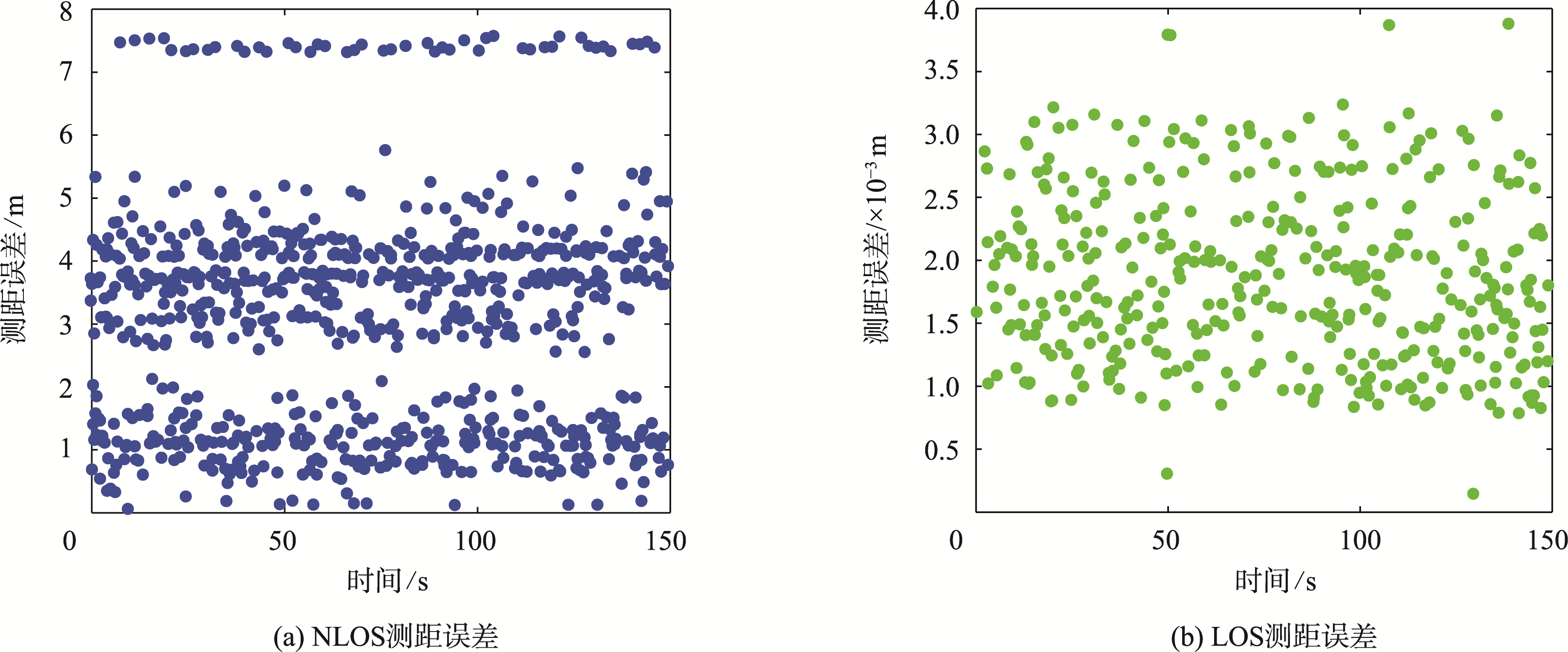
图6
静态实验NLOS场景与LOS场景下测距误差对比
表1
不同算法识别NLOS基准站的数量
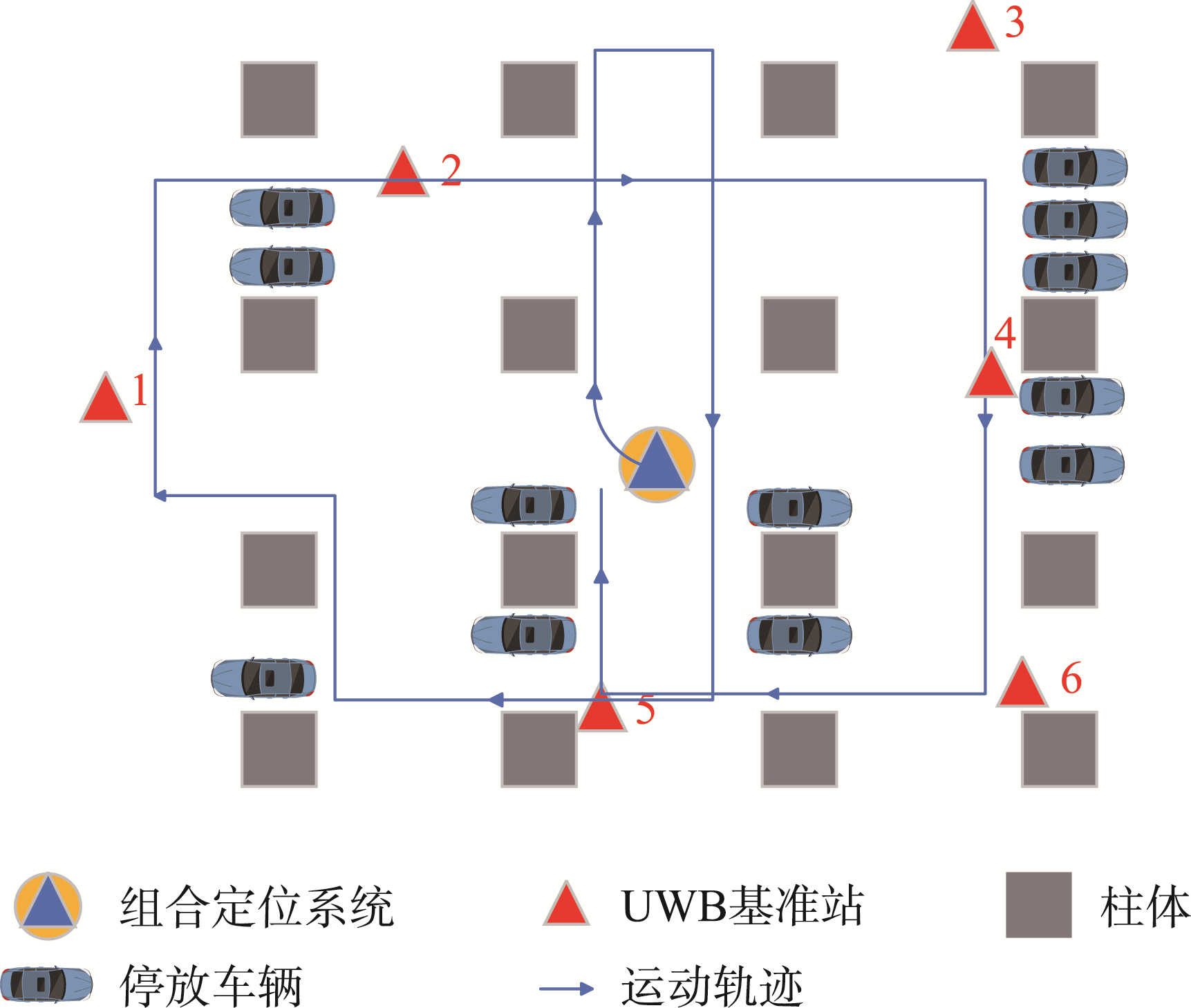
图7
地下停车场实验布局
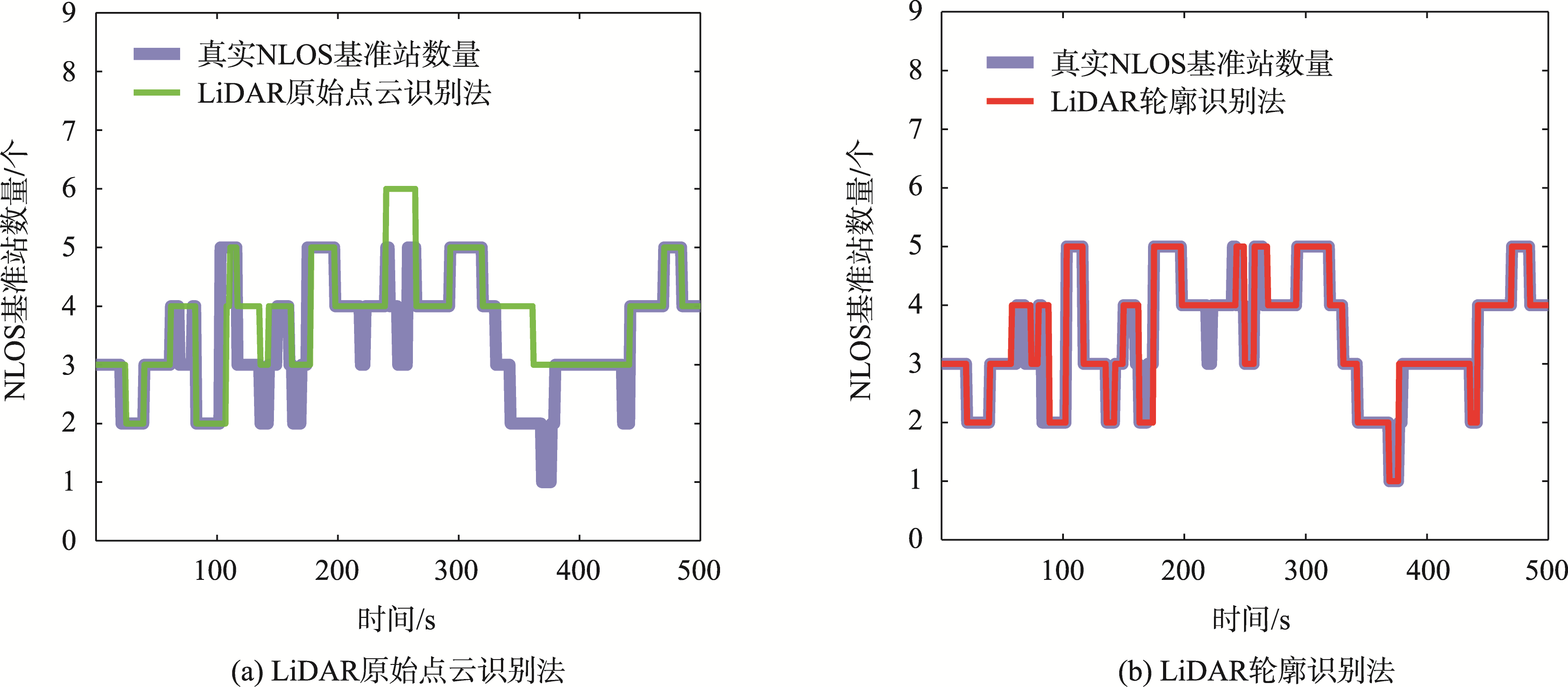
图8
动态识别算法NLOS基准站数目对比
图9
UWB基准站原始测距误差和LOS测距误差
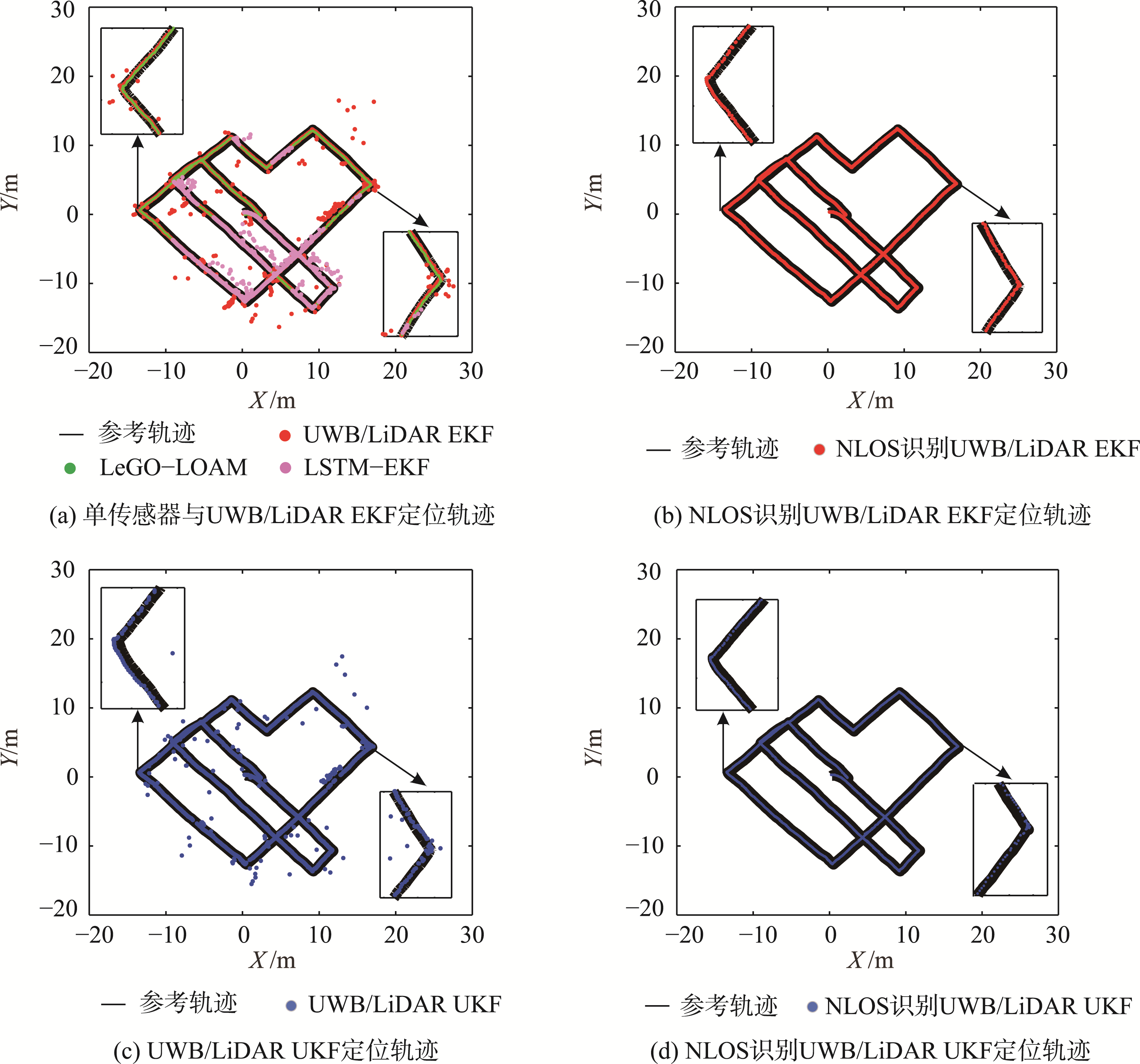
图10
不同算法定位轨迹对比
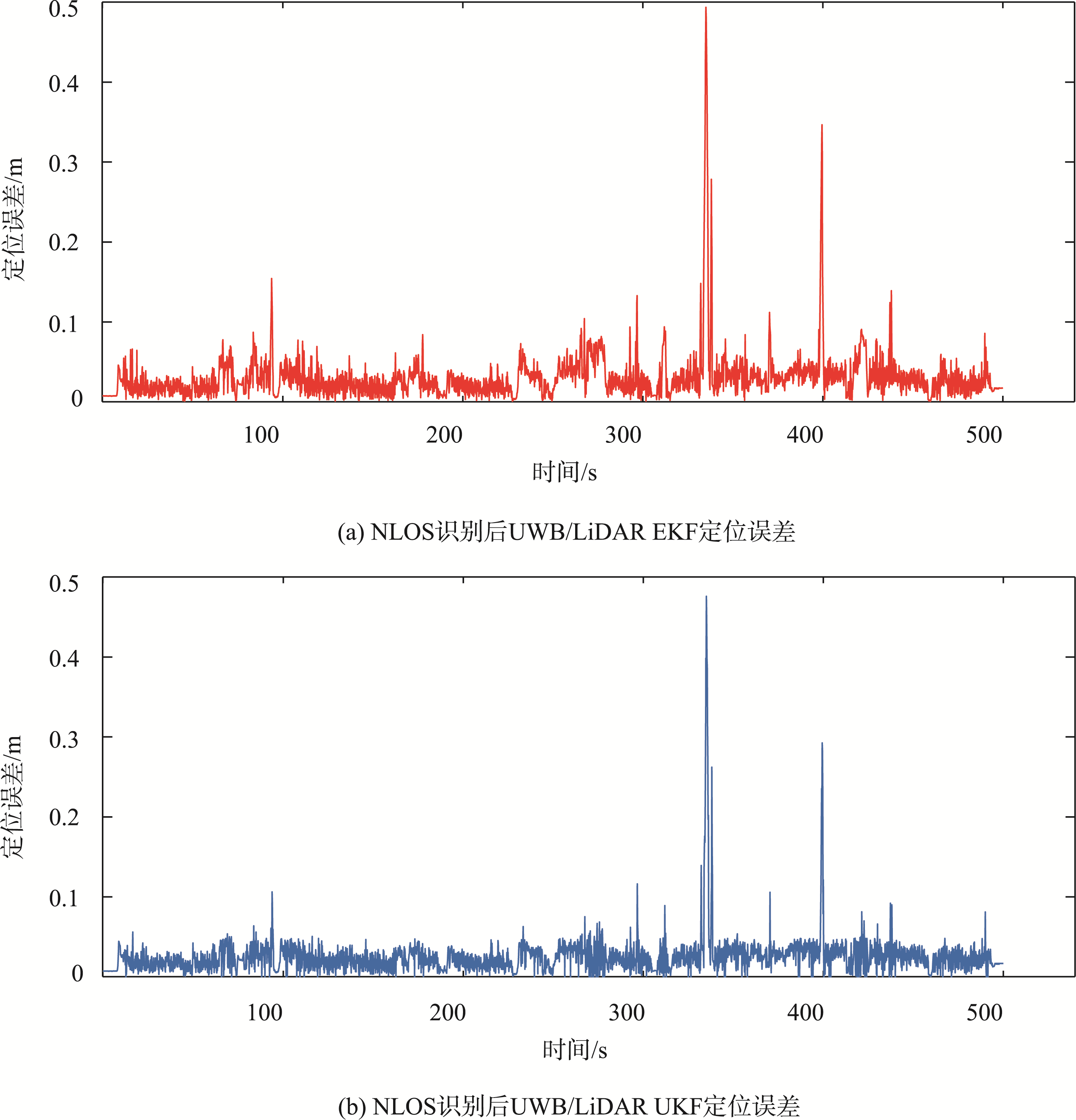
图11
NLOS识别后UWB/LiDAR融合定位误差
表3
LeGO-LOAM与基于LiDAR/UWB融合的5种定位算法在NLOS识别前后的精度对比